Wave Excitation Force Estimation of Wave Energy Floats Using Extended Kalman Filters
Pith reviewed 2026-05-24 19:30 UTC · model grok-4.3
The pith
Two Extended Kalman Filter formulations estimate wave excitation force on floats from position and velocity data alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
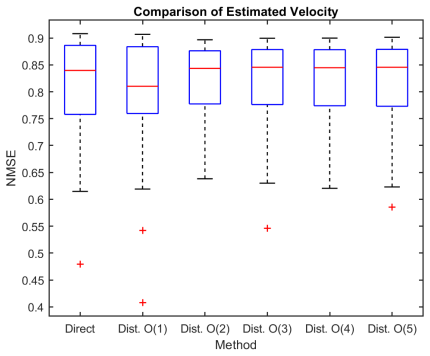
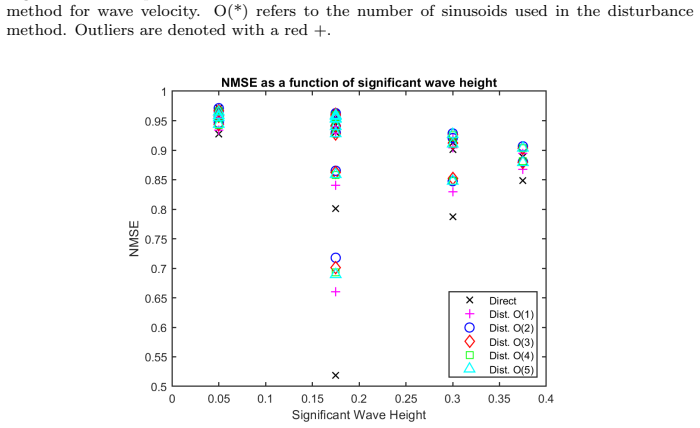
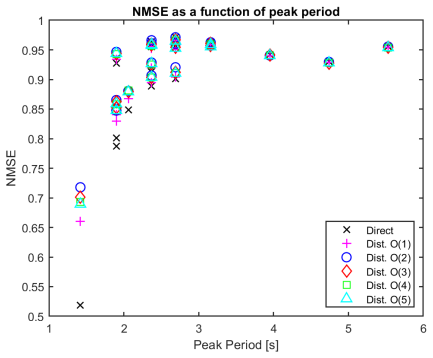
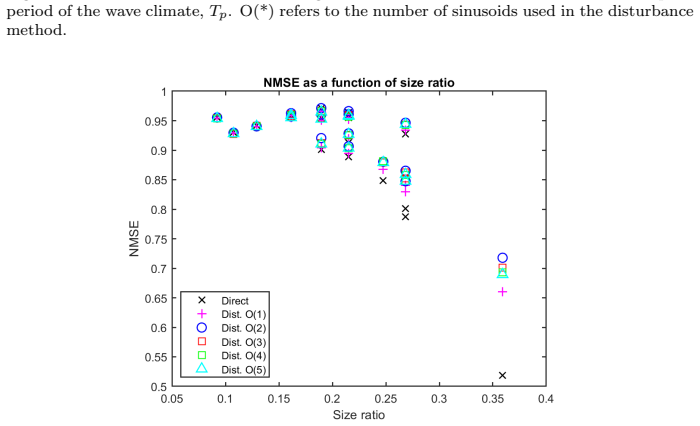
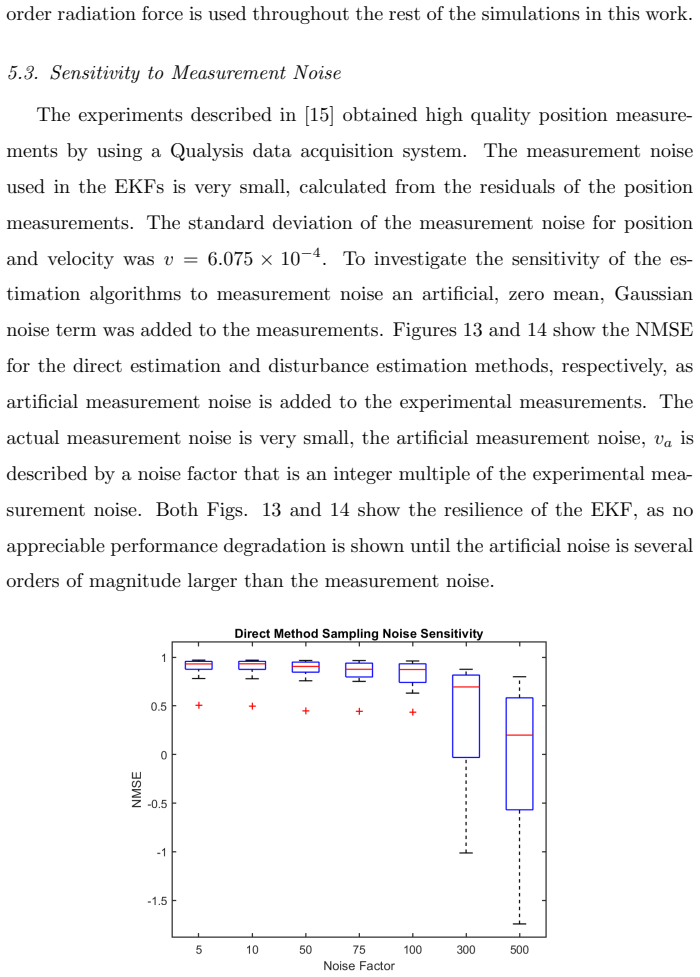
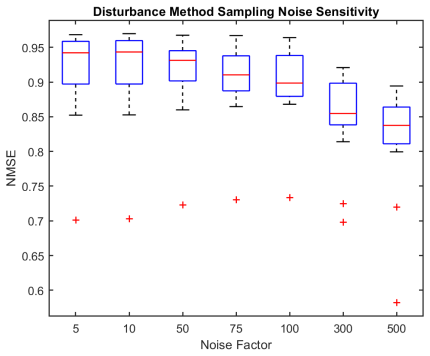
Two different estimation methods using a nonlinear Extended Kalman Filter are tested on experimental wave tank data for a heaving semi-submerged float. The first method relies on directly including the excitation force as a state in the first order dynamics, which allows the random walk of the Kalman filter to identify an estimate of the excitation force. The second method models the wave excitation force as a harmonic oscillator comprised of sinusoidal components. Both methods are evaluated for a variety of incident waves and additional sensitivity analyses are performed to investigate the susceptibility of these estimation methods to changes in the model, measurement noise, and sampling.
What carries the argument
Extended Kalman Filter whose state vector either augments the force as a random-walk variable or augments it as the output of a harmonic oscillator driven by sinusoids.
If this is right
- Advanced control strategies that require the wave excitation force as input can be implemented using only standard motion sensors.
- The same estimation approach works across a range of incident wave frequencies and amplitudes in controlled tank conditions.
- Sensitivity tests quantify how much the estimates degrade when the float model, sensor noise, or data rate changes.
Where Pith is reading between the lines
- The approach could be combined with existing WEC controllers to close the loop without adding hardware.
- Field deployments might need only modest extra computation if the filter runs on the same embedded processor already used for motion sensing.
- Similar state-augmentation tricks might apply to estimating other unmeasured loads, such as current forces on tidal devices.
Load-bearing premise
The chosen dynamic model of the float together with the random-walk or harmonic representation of the excitation force is accurate enough for the filter to produce reliable estimates from the available measurements.
What would settle it
Direct comparison of the filter outputs against an independent measurement of the actual excitation force in the same wave-tank runs would show large, persistent errors across the tested wave conditions.
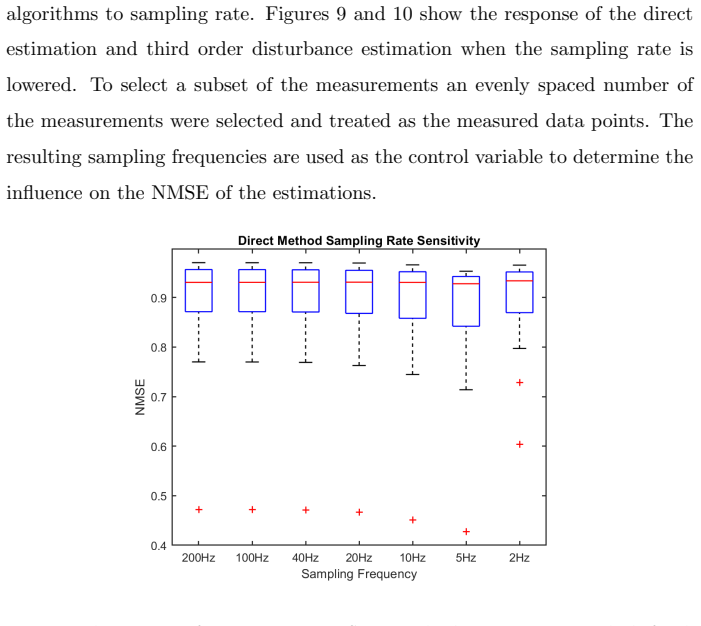
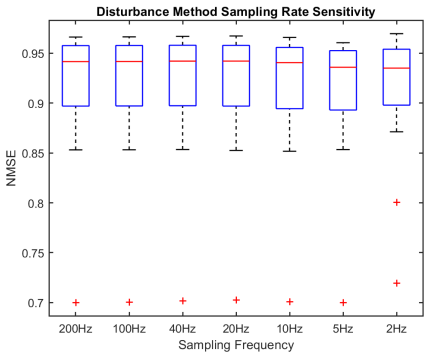
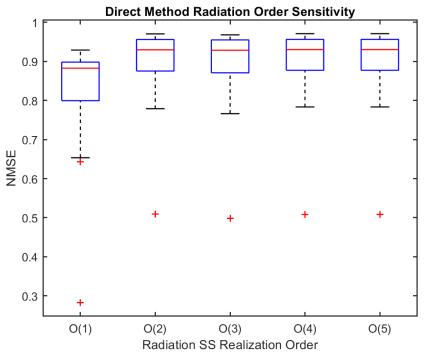
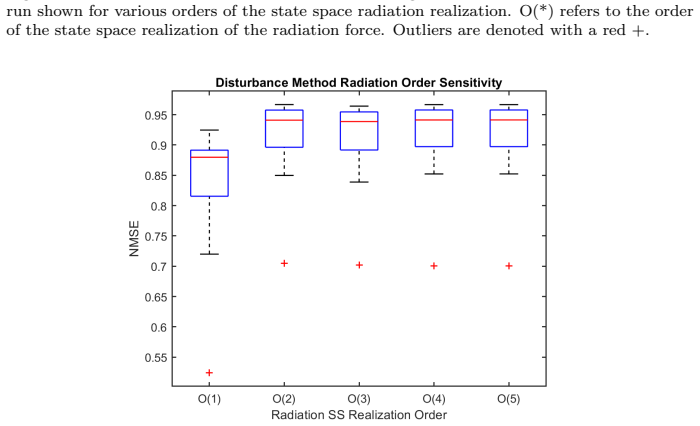
Figures
read the original abstract
In many advanced control strategies the wave excitation force is key to determining the control input. However, it is often difficult to measure the excitation force on a Wave Energy Converter (WEC). The use of Kalman filters to estimate the wave excitation force based on readily available measurement data can potentially fill the gap between the development of WEC control strategies and the data that is available. Two different estimation methods using an nonlinear Extended Kalman Filter are tested on experimental wave tank data for a heaving semi-submerged float. The first method relies on directly including the excitation force as a state in the first order dynamics---which allows the "random walk" of the Kalman filter to identify an estimate of the excitation force. The second method of estimation involves modeling the wave excitation force as a harmonic oscillator comprised of sinusoidal components. Both methods are evaluated for a variety of incident waves and additional sensitivity analyses are performed to investigate the susceptibility of these estimation methods to changes in the model, measurement noise, and sampling rate.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes and experimentally tests two Extended Kalman Filter formulations for estimating wave excitation force on a heaving semi-submerged WEC float from position and velocity measurements alone. The first augments the first-order hydrodynamic model with the excitation force as a random-walk state; the second represents the force as a sum of harmonic oscillators. Both are evaluated on wave-tank data across multiple regular and irregular wave conditions, with additional sensitivity tests on model parameters, measurement noise, and sampling rate.
Significance. If the estimates are shown to be reliable, the work would support advanced WEC control strategies that require real-time excitation-force information without dedicated force sensors. The use of physical tank experiments across varied wave conditions and the inclusion of sensitivity analyses are positive features that strengthen the practical relevance of the claim.
major comments (3)
- [Results section] Results section (and associated figures): quantitative performance metrics such as RMSE, bias, or correlation between estimated and reference excitation forces are not reported. Without these, the claim that the filters 'can estimate' the force rests on qualitative visual agreement whose strength cannot be assessed.
- [Model description] Model description (likely §2–3): the full state-space equations, including numerical values or identification method for added mass, radiation damping, and hydrostatic restoring coefficients, are not supplied. This prevents independent assessment of whether the assumed first-order dynamics are sufficiently accurate for the EKF to recover unbiased force estimates.
- [Validation approach] Validation approach: because excitation force cannot be measured directly, the experimental results test consistency between the filter output and the assumed hydrodynamic model rather than absolute accuracy. The manuscript should explicitly discuss this limitation and any steps taken to mitigate model mismatch (e.g., viscous drag or higher-order wave effects).
minor comments (2)
- Notation for the two EKF variants should be made consistent across text and figures to avoid reader confusion between the random-walk and harmonic formulations.
- Figure captions should state the exact wave conditions (height, period, regular/irregular) and sampling rate used in each panel.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below.
read point-by-point responses
-
Referee: [Results section] Results section (and associated figures): quantitative performance metrics such as RMSE, bias, or correlation between estimated and reference excitation forces are not reported. Without these, the claim that the filters 'can estimate' the force rests on qualitative visual agreement whose strength cannot be assessed.
Authors: We agree that quantitative metrics strengthen the evaluation. The revised manuscript will include RMSE, bias, and correlation coefficients between estimated and reference excitation forces for all regular and irregular wave cases, added to the Results section and figures/tables. revision: yes
-
Referee: [Model description] Model description (likely §2–3): the full state-space equations, including numerical values or identification method for added mass, radiation damping, and hydrostatic restoring coefficients, are not supplied. This prevents independent assessment of whether the assumed first-order dynamics are sufficiently accurate for the EKF to recover unbiased force estimates.
Authors: We acknowledge the need for full reproducibility. The revised manuscript will supply the complete state-space equations along with the numerical values and identification methods (from potential flow analysis or tank tests) for added mass, radiation damping, and hydrostatic restoring coefficients. revision: yes
-
Referee: [Validation approach] Validation approach: because excitation force cannot be measured directly, the experimental results test consistency between the filter output and the assumed hydrodynamic model rather than absolute accuracy. The manuscript should explicitly discuss this limitation and any steps taken to mitigate model mismatch (e.g., viscous drag or higher-order wave effects).
Authors: This limitation is inherent and valid. The revised manuscript will add an explicit discussion of the model-consistency nature of the validation, potential mismatches (viscous drag, higher-order effects), and mitigation approaches such as testing across varied wave conditions. revision: yes
Circularity Check
No circularity: standard EKF estimation validated on independent experimental data
full rationale
The paper applies two standard EKF formulations (random-walk state augmentation and harmonic oscillator model) to estimate excitation force from heave position/velocity measurements using a first-order hydrodynamic model. Performance is assessed directly against experimental tank data for multiple wave conditions, with sensitivity checks on model parameters, noise, and sampling. No step reduces a reported estimate or prediction to a fitted input by construction, no self-citation is load-bearing for the central claim, and no uniqueness theorem or ansatz is imported from prior author work. The derivation chain is self-contained against external measurements.
Axiom & Free-Parameter Ledger
free parameters (1)
- Process-noise covariance for excitation-force state
axioms (2)
- domain assumption The float dynamics can be adequately captured by a first-order model driven by the excitation force.
- domain assumption Wave excitation force can be represented as a finite sum of sinusoids at known frequencies.
Reference graph
Works this paper leans on
-
[1]
A. Day, A. Babarit, A. Fontane, Y. He, M. Kraskowski, M. Murai, I. Pen- esis, F. Salvatore, H. Shin, Hydrodynamic modelling of marine renewable energy devices: A state of the art review, Ocean Engineering
-
[2]
Falnes, A review of wave-energy extraction, Marine Structures
J. Falnes, A review of wave-energy extraction, Marine Structures
-
[3]
Y. Li, Y. Yu, A synthesis of numerical methods for modeling wave energy converter-point absorbers, Renewable and Sustainable Energy Reviews 16 (2012) 4352-4364
work page 2012
-
[4]
M. Folley (Ed.), Numerical Modelling of Wave Energy Converters State-of- the-art techniques for single devices and arrays, Elsevier, 2016, Ch. 3,7,12
work page 2016
-
[5]
T. K. A. Brekken, On model predictive control for a point absorber wave energy converter, in: IEEE Trondheim Power Tech, 2011
work page 2011
-
[6]
B. Ling, B. Batten, Using extended kalman filters for real-time estimation of excitation forces on a wave energy converter, in: Proceedings of the 3rd Marine Energy Technology Symposium, 2015
work page 2015
- [7]
-
[8]
O. Abdelkhalik, S. Zou, R. Robinett, G. Bacelli, D. Wilson, Estimation of excitation forces for wave energy converters control using pressure mea- surements, International Journal of Control 90 (8) (2016) 1793–1805
work page 2016
-
[9]
M. G. Abril, F. Paparella, J. V. Ringwood, Excitation force estimation and forecasting for wave energy applications, in: International Federation of Automatic Control, Elsevier, 2017, pp. 14692–14697
work page 2017
-
[10]
A. F. Davis, B. C. Fabien, Systematic identification of drag coefficients for a heaving wave follower, Journal of Ocean Engineering 168. 32
-
[11]
J. L. Crassidis, J. L. Junkins, Optimal Estimation of Dynamic Systems, second edition Edition, Chapman and Hall/CRC Applied Mathematics and Nonlinear Science, CRC Press, 2011
work page 2011
- [12]
-
[13]
M. A. Bhinder, A. Babarit, L. Gentaz, P. Ferrant, Potential time domain model with viscous correction and cfd analysis of a generic surging floating wave energy converter, International Journal of Marine Energy 10 (2015) 70-96
work page 2015
-
[14]
A. Combourieu, M. Lawson, A. Babarit, K. Ruehl, A. Roy, R. Costello, W. Laporte, H. Bailey, Wec 3: Wave energy converter code comparison project, in: Proceedings of the 11 th European Wave and Tidal Energy Conference, 2015
work page 2015
- [15]
-
[16]
Y. Hong, R. Waters, C. Bostrom, M. Eriksson, J. Engstrom, M. Leijon, Review on electrical control stategies for wave energy converting systems, Renewable and Sustainable Energy Reviews 31 (2014) 329–342
work page 2014
-
[17]
N. Tom, R. W. Yeung, Experimental confirmation of nonlinear-model- predictive control applied offline to a permanent magnet linear generator for ocean-wave energy conversion, IEEE Journal of Oceanic Engineering
- [18]
-
[19]
A. Babarit, J. Hals, M. Muliawan, A. Kurniawan, T. Moan, J. Krokstad, Numerical benchmarking study of a selection of wave energy converters, Renewable Energy 41 (2012) 44-63
work page 2012
-
[20]
Cummins, The impulse response function and ship motions, Schiffstech- nik
W. Cummins, The impulse response function and ship motions, Schiffstech- nik
- [21]
-
[22]
Chakrabarti, Handbook of Offshore Engineering, Volumes 1-2, Elsevier, 2005, Ch
S. Chakrabarti, Handbook of Offshore Engineering, Volumes 1-2, Elsevier, 2005, Ch. 4, pp. 137-161
work page 2005
-
[23]
A. Zurkinden, F. Ferri, S. Beatty, J. Kofoed, M. Kramer, Non-linear nu- merical modeling and experimental testing of apoint absorber wave energy converter, Ocean Engineering
-
[24]
E. Kristiansen, A. Hijulstad, O. Egeeland, State-space representation of radiation forces in time-domain vessel models, Ocean Eng. 32 (2005) 2195- 2216
work page 2005
- [25]
-
[26]
J. Falnes, Ocean Waves and Oscillating Systems: Linear Interactions In- cluding Wave-Energy Extraction, Cambridge University Press, 2002, Ch. 5, pp. 125-135
work page 2002
-
[27]
URL http://nnmrec.oregonstate.edu/industry-resources/ open-data 34
NNMREC, Marine and hydrokinetics open data project (2017). URL http://nnmrec.oregonstate.edu/industry-resources/ open-data 34
work page 2017
-
[28]
A. Babarit, et. al., Nemoh (2017). URL http://lheea.ec-nantes.fr/doku.php/emo/nemoh/
work page 2017
-
[29]
A. F. Davis, Github repository: Ekf implementation (2017). URL https://github.com/afdavisUW/EKF_implementation.git
work page 2017
-
[30]
R. K. Mehra, On the identification of variances and adaptive kalman filter- ing, IEEE Transactions on Automatic Control 15 (2) (1970) 175–184
work page 1970
-
[31]
B. A. Ling, Real-time estimation and prediction of wave excitation forces for wave energy control applications, Master’s thesis, Oregon State University (June 2015)
work page 2015
- [32]
-
[33]
Orcaflex documentation, Orcina Website: https://www.orcina.com/SoftwareProducts/OrcaFlex/Documentation/Help/
-
[34]
URL https://www.mathworks.com/help/ident/ref/goodnessoffit
Mathworks, Matlab documentation, mATLAB documentation of goodnes- sOfFit function (2019). URL https://www.mathworks.com/help/ident/ref/goodnessoffit. html
work page 2019
-
[35]
Newman, Marine Hydrodynamics, MIT Pres, 1977, Ch
J. Newman, Marine Hydrodynamics, MIT Pres, 1977, Ch. 6, pp. 39-45. 35
work page 1977
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.