System-Level Development of a User-Integrated Semi-Autonomous Lawn Mowing System: Problem Overview, Basic Requirements, and Proposed Architecture
Pith reviewed 2026-05-24 22:26 UTC · model grok-4.3
The pith
A systems engineering perspective yields a proposed architecture for user-integrated semi-autonomous home lawn mowers.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper proposes a general system architecture for user-integrated semi-autonomous home-sized lawn mowing systems, developed from a systems engineering perspective, along with a preliminary set of design requirements, to serve as a baseline and motivation for further development and refinement.
What carries the argument
The general system architecture that integrates user input with semi-autonomous mowing functions to address home-scale operational needs.
If this is right
- Development efforts can use the architecture directly to build and test functional prototypes.
- The preliminary requirements provide a checklist for evaluating or improving existing mowing systems.
- Academic and commercial groups can reference this structure as a shared starting point for collaboration.
- It underscores how systems engineering can organize requirements for emerging home robotics applications.
Where Pith is reading between the lines
- This framing may favor incremental user-assisted designs over waiting for fully autonomous solutions that face harder terrain and safety challenges.
- The architecture could extend to other household robotics tasks that benefit from occasional human correction.
- Real-home trials measuring task completion time and user intervention frequency would test whether the semi-autonomous balance delivers measurable gains.
Load-bearing premise
That a user-integrated semi-autonomous approach is the appropriate framing for home lawn mowing and that the proposed architecture captures the essential requirements.
What would settle it
Implementation of systems that ignore the user-integration element or the proposed architecture yet achieve superior reliability, safety, or user acceptance in varied home environments would show the baseline is not essential.
Figures
read the original abstract
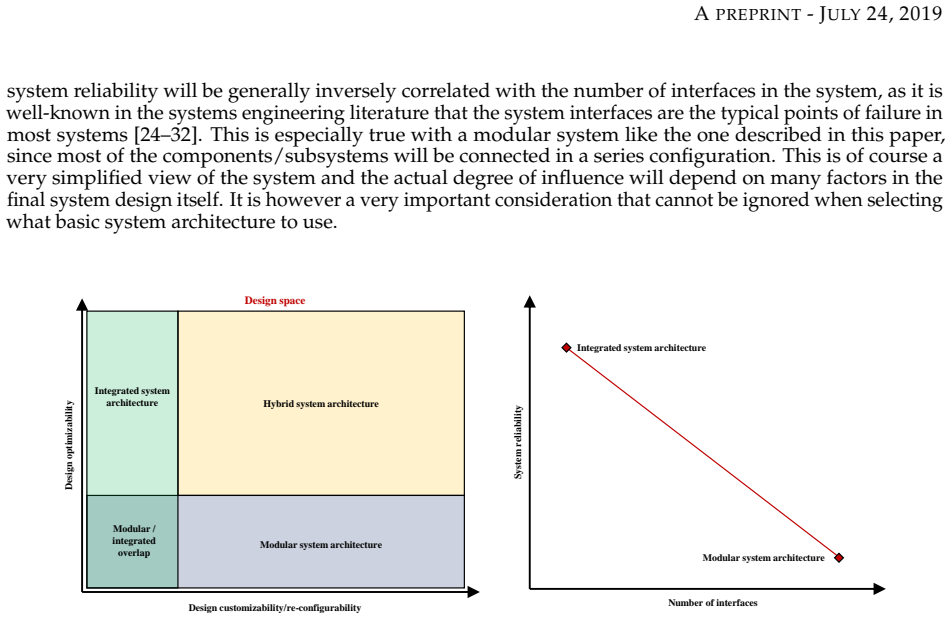
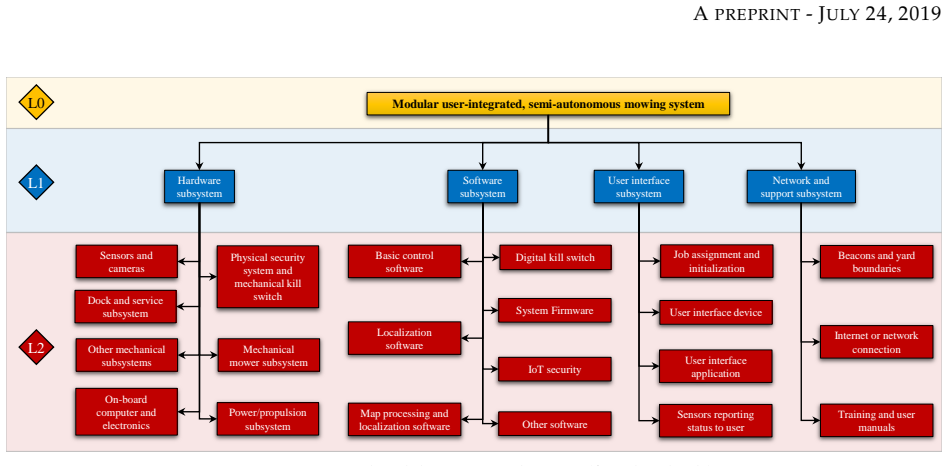
This concept paper outlines some recent efforts toward the design and development of user-integrated semi-autonomous home-sized lawn mowing systems from a systems engineering perspective. This is an important and emerging field of study within the robotics and systems engineering communities. The work presented includes a review of current progress on this problem, a discussion of the problem from a systems engineering perspective, a general system architecture developed by the authors, and a preliminary set of design requirements. This work is meant to provide a baseline and motivation for the further development and refinement of these systems within the systems engineering and robotics communities and is relevant to both academic and commercial research.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This concept paper reviews progress on user-integrated semi-autonomous home-sized lawn mowing systems, frames the problem from a systems-engineering viewpoint, presents a proposed general system architecture, and lists preliminary design requirements. The stated contribution is to supply a baseline and motivation for subsequent work in the robotics and systems-engineering communities rather than to deliver validated performance data or formal proofs.
Significance. If the architecture and requirements accurately reflect essential integration points between user input and autonomous subsystems, the paper could usefully seed further community efforts. Its primary strength is the explicit positioning as a non-empirical baseline document; no machine-checked proofs, reproducible code, or falsifiable predictions are supplied, so significance remains motivational rather than demonstrative.
minor comments (3)
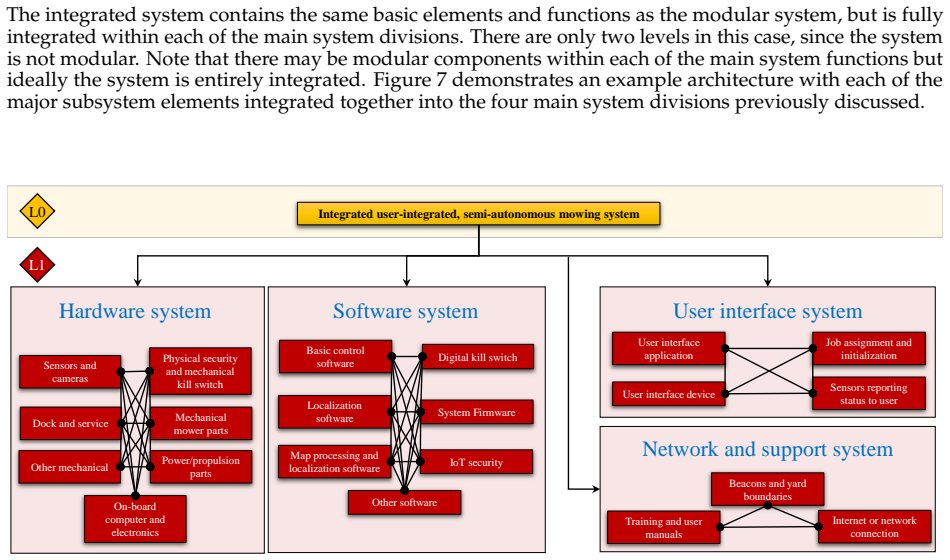
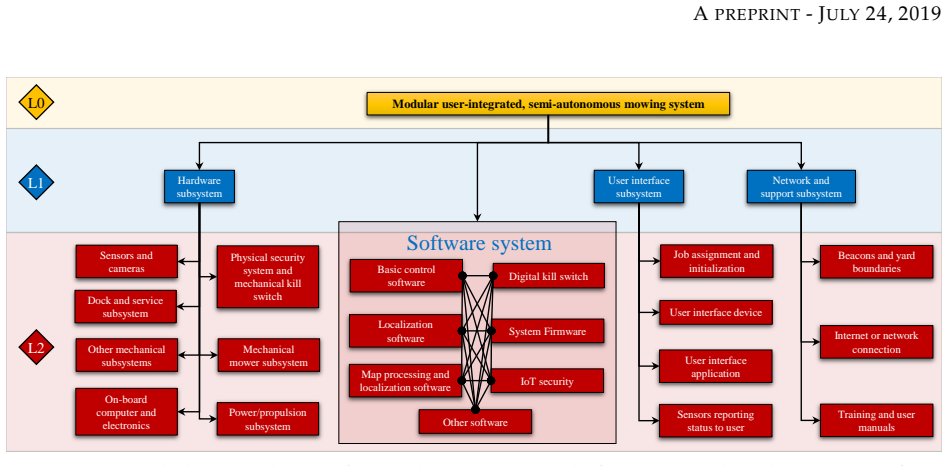
- [Proposed Architecture section] The abstract states that a 'general system architecture developed by the authors' is presented, yet the corresponding section supplies only high-level block descriptions without interface specifications or data-flow details; adding a single schematic would improve clarity for readers intending to build upon the baseline.
- [Basic Requirements section] The preliminary requirements list mixes functional and non-functional items without explicit traceability to the systems-engineering discussion that precedes it; a short traceability matrix or numbered cross-references would make the linkage between problem framing and requirements explicit.
- [Review of current progress] Several citations to commercial robotic mowers appear in the review of current progress but lack publication years or version identifiers, making it difficult for readers to locate the exact systems being contrasted with the proposed user-integrated approach.
Simulated Author's Rebuttal
We thank the referee for the review and for recommending minor revision. The report correctly characterizes the manuscript as a non-empirical concept paper whose contribution is motivational rather than demonstrative.
Circularity Check
No significant circularity detected
full rationale
The paper is a systems-engineering concept document presenting a review of progress, a problem discussion, a proposed general architecture, and preliminary design requirements. It explicitly frames its contribution as a baseline and motivation for community development rather than any formal derivation, prediction, or validated claim. No equations, fitted parameters, self-citations used as load-bearing premises, or reductions of outputs to inputs by construction appear anywhere in the manuscript. The central claim therefore stands independently of any circular step.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Grand View Research. Lawn mowers market size, share & trends analysis report by product (petrol, electric, manual, robotic), by end use (residential, commercial & govt.), by region (mea, asia pacific, north america), and segment forecasts, 2019 - 2025. Technical report, 2019. Industry Report Num- ber GVR-1-68038-927-2. Available onlinehttps://www.grandview...
work page 2019
-
[2]
Evaluating the roomba: A low-cost, ubiquitous platform for robotics research and education
Ben Tribelhorn and Zachary Dodds. Evaluating the roomba: A low-cost, ubiquitous platform for robotics research and education. In Proceedings 2007 IEEE International Conference on Robotics and Automation, pages 1393–1399. IEEE, 2007
work page 2007
-
[3]
Aponte-Roa, Xavier Collazo, Miguel Goenaga, Albert A
Diego A. Aponte-Roa, Xavier Collazo, Miguel Goenaga, Albert A. Espinoza, and Kasandra Vazquez. Development and evaluation of a remote controlled electric lawn mower. In 2019 IEEE 9th Annual Computing and Communication Workshop and Conference (CCWC). IEEE, 2019
work page 2019
-
[4]
Robert W Hicks II and Ernest L Hall. Survey of robot lawn mowers. In David P . Casasent, editor, Intelligent Robots and Computer Vision XIX: Algorithms, Techniques, and Active Vision. SPIE, 2000. 9 A PREPRINT - JULY 24, 2019
work page 2000
-
[5]
Household robotics: autonomous devices for vacuuming and lawn mowing [applications of control]
Haydar Sahin and Levent Givenc. Household robotics: autonomous devices for vacuuming and lawn mowing [applications of control]. IEEE Control Systems, 27(2):20–96, 2007
work page 2007
-
[6]
Autonomous lawn care applications
Michael Gregg, Eric M Schwartz, and Antonio A Arroyo. Autonomous lawn care applications. In 2006 Florida Conference on Recent Advances in Robotics, FCRAR 2006, 2006
work page 2006
-
[7]
Design of an autonomous lawn mower with optimal route planning
Bing-Min Shiu and Chun-Liang Lin. Design of an autonomous lawn mower with optimal route planning. In 2008 IEEE International Conference on Industrial Technology. IEEE, 2008
work page 2008
-
[8]
Practical path planning and obstacle avoidance and autonomous mowing
Navid Nourani-Vatani, Michael Bosse, Jonathan Roberts, and Matthew Dunbabin. Practical path planning and obstacle avoidance and autonomous mowing. In Australasian Conference on Robotics and Automation 2006. ARAA, 2006
work page 2006
-
[9]
Design and implementation of autonomous lawn-mower robot controller
Muhammad Wasif. Design and implementation of autonomous lawn-mower robot controller. In 2011 7th International Conference on Emerging Technologies. IEEE, 2011
work page 2011
-
[10]
Kathryn A. Daltorio, Amaury D. Rolin, Jonathan A. Beno, Bradley E. Hughes, Alexander Schepelmann, Michael S. Branicky, Roger D. Quinn, and James M. Green. An obstacle-edging reflex for an autonomous lawnmower. In IEEE/ION Position, Location and Navigation Symposium, pages 1079–1092. IEEE, 2010
work page 2010
-
[11]
Navigation method and system for autonomous machines with markers defining the working area
E Peless, S Abramson, and G Dror. Navigation method and system for autonomous machines with markers defining the working area. Patent Number US6984952B2, 2001. Available online at https: //patents.google.com/patent/US6984952
work page 2001
-
[12]
Abd. Manan Samad, Nazrin Kamarulzaman, Muhammad Asyraf Hamdani, Thuaibatul Aslamiah Mastor, and Khairil Afendy Hashim. The potential of unmanned aerial vehicle (UAV) for civilian and mapping application. In 2013 IEEE 3rd International Conference on System Engineering and Technology, pages 313–318. IEEE, 2013
work page 2013
-
[13]
Environment-detection-and-mapping algorithm for autonomous driving in rural or off-road environment
Jaewoong Choi, Junyoung Lee, Dongwook Kim, Giacomo Soprani, Pietro Cerri, Alberto Broggi, and Kyongsu Yi. Environment-detection-and-mapping algorithm for autonomous driving in rural or off-road environment. IEEE Transactions on Intelligent Transportation Systems, 13(2):974–982, 2012
work page 2012
-
[14]
Embedded robust visual obstacle detection on autonomous lawn mowers
Mathias Franzius, Mark Dunn, Nils Einecke, and Roman Dirnberger. Embedded robust visual obstacle detection on autonomous lawn mowers. In 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). IEEE, 2017
work page 2017
-
[15]
Visual segmentation of lawn grass for a mobile robotic lawnmower
A Schepelmann, R E Hudson, F L 3 Merat, and R D Quinn. Visual segmentation of lawn grass for a mobile robotic lawnmower. In 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 734–739. IEEE, 2010
work page 2010
-
[16]
Efficient visual obstacle avoidance for robotic mower
Yao Guo and Fuchun Sun. Efficient visual obstacle avoidance for robotic mower. In2017 2nd International Conference on Control and Robotics Engineering (ICCRE), pages 23–28. IEEE, 2017
work page 2017
-
[17]
Density weighted connectivity of grass pixels in image frames for biomass estimation
Ligang Zhang, Brijesh Verma, David Stockwell, and Sujan Chowdhury. Density weighted connectivity of grass pixels in image frames for biomass estimation. Expert Systems with Applications, 101:213–227, 2018
work page 2018
-
[18]
Coverage for robotics – a survey of recent results
Howie Choset. Coverage for robotics – a survey of recent results. Annals of Mathematics and Artificial Intelligence, 31(1/4):113–126, 2001
work page 2001
-
[19]
Coverage path planning: The boustrophedon cellular decomposi- tion
Howie Choset and Philippe Pignon. Coverage path planning: The boustrophedon cellular decomposi- tion. In Field and Service Robotics, pages 203–209. Springer London, 1998
work page 1998
-
[20]
Ercan U. Acar, Howie Choset, Alfred A. Rizzi, Prasad N. Atkar, and Douglas Hull. Morse decomposi- tions for coverage tasks. The International Journal of Robotics Research, 21(4):331–344, 2002
work page 2002
-
[21]
S.C. Wong and B.A. MacDonald. A topological coverage algorithm for mobile robots. In Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), pages 1685–1690. IEEE, 2003
work page 2003
-
[22]
Finding efficient robot path for the complete coverage of a known space
Zhiyang Yao. Finding efficient robot path for the complete coverage of a known space. In2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 3369–3374. IEEE, 2006
work page 2006
-
[23]
Yang Yuan, Albert E. Patterson, Theresa L. Patterson, and William R. Norris. User-integrated semi- autonomous lawn mowing systems: Example basic, functional, non-functional, and safety and security requirements. Technical report, University of Illinois at Urbana-Champaign, 2019. Available online at http://hdl.handle.net/2142/104210
work page 2019
- [24]
- [25]
-
[26]
Elsayed Elsayed. Reliability engineering. John Wiley & Sons, Hoboken, 2012
work page 2012
-
[27]
M. Hohenbichler and R. Rackwitz. First-order concepts in system reliability. Structural Safety, 1(3):177– 188, 1982
work page 1982
-
[28]
On the computational complexity of reliability redundancy allocation in a series system
Maw-Sheng Chern. On the computational complexity of reliability redundancy allocation in a series system. Operations Research Letters, 11(5):309–315, 1992
work page 1992
-
[29]
Part count and design of robust systems
Daniel Frey, Joseph Palladino, John Sullivan, and Malvern Atherton. Part count and design of robust systems. Systems Engineering, 10(3):203–221, 2007
work page 2007
-
[30]
Complexity in engi- neering design and manufacturing
Waguih ElMaraghy, Hoda ElMaraghy, Tetsuo Tomiyama, and Laszlo Monostori. Complexity in engi- neering design and manufacturing. CIRP Annals, 61(2):793–814, 2012
work page 2012
-
[31]
Z. Xu, W. Kuo, and H.-H. Lin. Optimization limits in improving system reliability. IEEE Transactions on Reliability, 39(1):51–60, 1990
work page 1990
-
[32]
Roy Billinton and Ronald N. Allan. Reliability Evaluation of Engineering Systems. Springer US, 1983. 11
work page 1983
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.