Hidden Markov Models derived from Behavior Trees
Pith reviewed 2026-05-24 17:13 UTC · model grok-4.3
The pith
Behavior trees augmented with statistics are equivalent to Hidden Markov Models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Augmenting behavior trees with statistical information produces structures that are formally equivalent to Hidden Markov Models, thereby permitting the direct application of HMM algorithms and dynamic Bayesian network methods to data from BT-based systems for tasks like state tracking and parameter identification under noisy observations.
What carries the argument
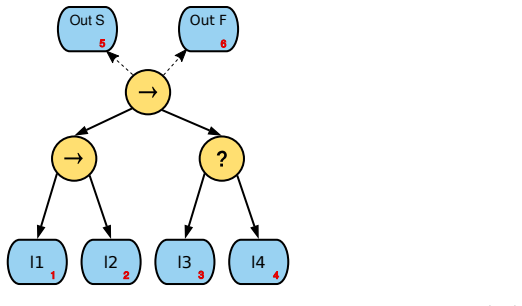
The augmented behavior tree, which adds statistical data to the tree nodes to enable conversion to an HMM representation.
If this is right
- Algorithms for HMMs can now be used to track execution in behavior tree systems.
- Parameter identification for behavior trees becomes feasible with noisy observations.
- Dynamic Bayesian networks can be applied to BT-based robotic data.
- Improved handling of uncertainty in robotics task planning and motion tracking.
Where Pith is reading between the lines
- This unification might allow automatic learning of behavior tree parameters from observed robot behaviors.
- Connections could be explored to other probabilistic graphical models beyond HMMs.
- Applications in human task modeling where BTs are used for motion tracking could benefit from HMM inference techniques.
Load-bearing premise
That adding statistical information to a behavior tree creates a structure equivalent to an HMM without changing the original tree's meaning or requiring extra assumptions.
What would settle it
Demonstrating a specific behavior tree with statistics that cannot be mapped to any HMM while keeping the same execution semantics, or showing that HMM algorithms produce incorrect results on augmented BT data.
Figures

read the original abstract
Behavior trees are rapidly attracting interest in robotics and human task-related motion tracking. However no algorithms currently exist to track or identify parameters of BTs under noisy observations. We report a new relationship between BTs, augmented with statistical information, and Hidden Markov Models. Exploiting this relationship will allow application of many algorithms for HMMs (and dynamic Bayesian networks) to data acquired from BT-based systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to report a new relationship between behavior trees augmented with statistical information and Hidden Markov Models. Exploiting this relationship would allow application of HMM (and dynamic Bayesian network) algorithms to data acquired from BT-based systems, addressing the lack of existing algorithms to track or identify BT parameters under noisy observations.
Significance. If the claimed formal relationship holds, the result would be significant for robotics and motion tracking, as it would enable transfer of established HMM inference and learning algorithms to BT-modeled systems without loss of original semantics.
major comments (1)
- [Abstract] Abstract: The manuscript states the existence of a relationship between statistically augmented BTs and HMMs but supplies no derivation, proof sketch, example, or verification. This prevents evaluation of the central claim that the augmentation produces a structure formally equivalent to an HMM.
Simulated Author's Rebuttal
We thank the referee for their comments. The major comment concerns the level of detail in the abstract; we address it point-by-point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The manuscript states the existence of a relationship between statistically augmented BTs and HMMs but supplies no derivation, proof sketch, example, or verification. This prevents evaluation of the central claim that the augmentation produces a structure formally equivalent to an HMM.
Authors: Abstracts are concise summaries and are not intended to contain full derivations or proofs. The manuscript body (Sections 3–5) supplies the requested elements: a constructive mapping from statistically augmented behavior trees to HMMs, a proof of equivalence that preserves semantics, worked examples, and verification against standard HMM inference algorithms. The central claim can therefore be evaluated from the complete manuscript. revision: no
Circularity Check
No significant circularity identified
full rationale
The manuscript excerpt consists solely of an abstract asserting a relationship between statistically augmented behavior trees and hidden Markov models, with no equations, formal mappings, derivations, or self-citations presented. No load-bearing steps exist to inspect for self-definition, fitted inputs renamed as predictions, or imported uniqueness theorems. The central claim is stated as a reported equivalence rather than constructed from prior fitted parameters or author-specific ansatzes, rendering the derivation chain empty and self-contained.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
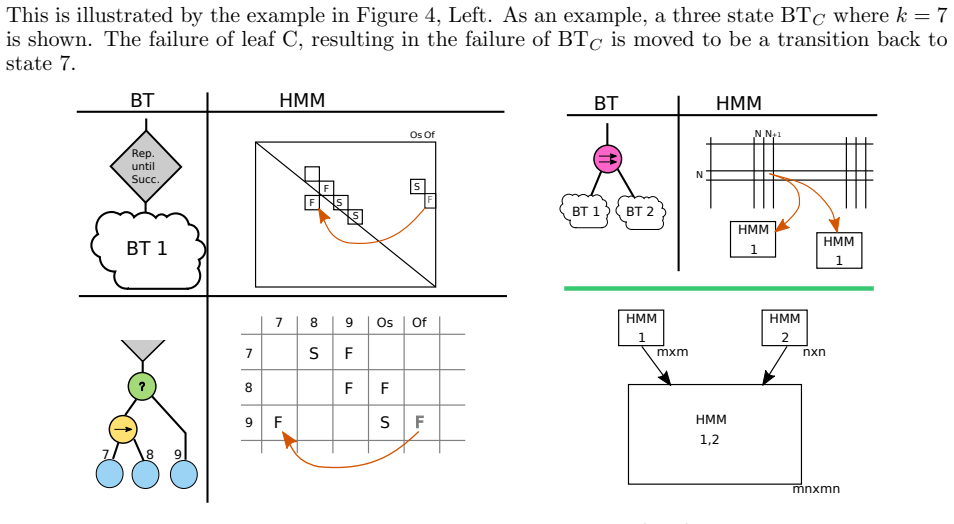
We report a new relationship between BTs, augmented with statistical information, and Hidden Markov Models... unique HMM having a specific structure... A must be upper diagonal... exactly 2 non-zero entries per row
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
ABT == {BT,Pl,B(l+2)×m}... psi = P(iS|state = i)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Mixture autoregressive hidden markov models for speech signals
Biing-Hwang Juang and Lawrence Rabiner. Mixture autoregressive hidden markov models for speech signals. IEEE Transactions on Acoustics, Speech, and Signal Processing , 33(6):1404– 1413, 1985
work page 1985
-
[2]
Hidden markov models for speech recognition
Biing-Hwang Juang and Laurence R Rabiner. Hidden markov models for speech recognition. Technometrics, 33(3):251–272, 1991
work page 1991
-
[3]
Review of methods for objective surgical skill evaluation
Carol E Reiley, Henry C Lin, David D Yuh, and Gregory D Hager. Review of methods for objective surgical skill evaluation. Surgical endoscopy, 25(2):356–366, 2011
work page 2011
-
[4]
Hidden markov models of biological primary sequence information
Pierre Baldi, Yves Chauvin, Tim Hunkapiller, and Marcella A McClure. Hidden markov models of biological primary sequence information. Proceedings of the National Academy of Sciences , 91(3):1059–1063, 1994
work page 1994
-
[5]
Costar: Instructing collaborative robots with behavior trees and vision
Chris Paxton, Andrew Hundt, Felix Jonathan, Kelleher Guerin, and Gregory D Hager. Costar: Instructing collaborative robots with behavior trees and vision. In Robotics and Automation (ICRA), 2017 IEEE International Conference on , pages 564–571. IEEE, 2017
work page 2017
-
[6]
Colledanchise and Petter ¨Ogren
M. Colledanchise and Petter ¨Ogren. How Behavior Trees Modularize Hybrid Control Systems and Generalize Sequential Behavior Compositions, the Subsumption Architecture, and Decision Trees. IEEE Transactions on Robotics , 33(2):372–389, April 2017. 12
work page 2017
-
[7]
Behavior Trees as a Representation for Medical Procedures
Blake Hannaford, Randall A. Bly, Ian Humphreys, and Mark Whipple. Behavior trees as a representation for medical procedures. ArXiv, 1808.08954(1801.07864), January 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[8]
An introduction to hidden markov models and bayesian networks
Zoubin Ghahramani. An introduction to hidden markov models and bayesian networks. In Hidden Markov models: applications in computer vision , pages 9–41. World Scientific, 2001
work page 2001
-
[9]
A tutorial on hidden markov models and selected applications in speech recognition
Lawrence R Rabiner. A tutorial on hidden markov models and selected applications in speech recognition. Proceedings of the IEEE , 77(2):257–286, 1989
work page 1989
-
[10]
B. Hannaford and P. Lee. Hidden markov model analysis of force/torque information in telema- nipulation. In Proceedings 1st International Symposium on Experimental Robotics , Montreal, June 1989
work page 1989
-
[11]
B. Hannaford and P. Lee. Hidden markov model of force torque information in telemanipulation. International Journal of Robotics Research , 10(5):528–539, 1991
work page 1991
-
[12]
Hidden markov model approach to skill learning and its application to telerobotics
Jie Yang, Yangsheng Xu, and Chiou S Chen. Hidden markov model approach to skill learning and its application to telerobotics. IEEE transactions on robotics and automation , 10(5):621– 631, 1994
work page 1994
-
[13]
Skill acquisition from human demonstration using a hidden markov model
Geir E Hovland, Pavan Sikka, and Brenan J McCarragher. Skill acquisition from human demonstration using a hidden markov model. In Robotics and Automation, 1996. Proceedings., 1996 IEEE International Conference on , volume 3, pages 2706–2711. Ieee, 1996
work page 1996
-
[14]
J. Rosen, J.D. Brown, L. Chang, M. Sinanan, and B. Hannaford. Generalized approach for modeling minimally invasive surgery as a stochastic process using a discrete markov model. IEEE Transactions on Biomedical Engineering , 53(3):399–413, March 2006
work page 2006
-
[15]
T.M. Kowalewski, J. Rosen, L. Chang, M. Sinanan, and B. Hannaford. Optimization of a vector quantization codebook for objective evaluation of surgical skill. In Proc. Medicine Meets Virtual Reality 12 , pages 174–179, January 2004
work page 2004
-
[16]
Building a better battle: The halo 3 ai objectives system
Dami´ an Isla. Building a better battle: The halo 3 ai objectives system. http://web.cs.wpi. edu/~rich/courses/imgd4000-d09/lectures/halo3.pdf
-
[17]
Evolving behaviour trees for the commer- cial game defcon
Chong-U Lim, Robin Baumgarten, and Simon Colton. Evolving behaviour trees for the commer- cial game defcon. In European Conference on the Applications of Evolutionary Computation , pages 100–110. Springer, 2010
work page 2010
-
[18]
Semi-autonomous sim- ulated brain tumor ablation with ravenii surgical robot using behavior tree
Danying Hu, Yuanzheng Gong, Blake Hannaford, and Eric J Seibel. Semi-autonomous sim- ulated brain tumor ablation with ravenii surgical robot using behavior tree. In 2015 IEEE International Conference on Robotics and Automation (ICRA) , pages 3868–3875. IEEE, 2015
work page 2015
-
[19]
Danying Hu, Yuanzheng Gong, Blake Hannaford, and Eric J. Seibel. Path planning for semi- automated simulated robotic neurosurgery. In 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , September 2015
work page 2015
-
[20]
Architecture of a surgical robot
P Kazanzides, J Zuhars, B Mittelstadt, B Williamson, P Cain, F Smith, L Rose, and B Musits. Architecture of a surgical robot. In Systems, Man and Cybernetics, 1992., IEEE International Conference on, pages 1624–1629. IEEE, 1992
work page 1992
-
[21]
Increasing modularity of uav control systems using computer game behavior trees
Petter Ogren. Increasing modularity of uav control systems using computer game behavior trees. In AIAA Guidance, Navigation and Control Conference, Minneapolis, MN , 2012
work page 2012
-
[22]
Maximally satisfying ltl action planning
Jana Tumova, Alejandro Marzinotto, Dimos V Dimarogonas, and Danica Kragic. Maximally satisfying ltl action planning. In Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference on , pages 1503–1510. IEEE, 2014. 13
work page 2014
-
[23]
How behavior trees modularize robustness and safety in hybrid systems
Michele Colledanchise and Petter ¨Ogren. How behavior trees modularize robustness and safety in hybrid systems. In Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ Interna- tional Conference on , pages 1482–1488. IEEE, 2014
work page 2014
-
[24]
Synthesis of correct-by- construction behavior trees
Michele Colledanchise, Richard M Murray, and Petter ¨Ogren. Synthesis of correct-by- construction behavior trees. In Intelligent Robots and Systems (IROS 2017), 2014 IEEE/RSJ International Conference on . IEEE, 2017
work page 2017
-
[25]
M. Quigley, K. Conley, B. Gerkey, J. Faust, T. Foote, J. Leibs, R. Wheeler, and A.Y. Ng. Ros: an open-source robot operating system. In ICRA Workshop on Open Source Software , volume 3, 2009
work page 2009
-
[26]
Towards a unified behavior trees framework for robot control
Alejandro Marzinotto, Michele Colledanchise, Christian Smith, and Petter ¨Ogren. Towards a unified behavior trees framework for robot control. In Robotics and Automation (ICRA), 2014 IEEE International Conference on , pages 5420–5427. IEEE, 2014
work page 2014
-
[27]
Performance analysis of stochastic behavior trees
Michele Colledanchise, Alejandro Marzinotto, and Petter ¨Ogren. Performance analysis of stochastic behavior trees. In 2014 IEEE International Conference on Robotics and Automation (ICRA), pages 3265–3272. IEEE, 2014
work page 2014
-
[28]
An in- tegrated system for autonomous robotics manipulation
J Andrew Bagnell, Felipe Cavalcanti, Lei Cui, Thomas Galluzzo, Martial Hebert, Moslem Kazemi, Matthew Klingensmith, Jacqueline Libby, Tian Yu Liu, and Nancy Pollard. An in- tegrated system for autonomous robotics manipulation. In Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on , pages 2955–2962. IEEE, 2012
work page 2012
-
[29]
Binary codes capable of correcting deletions, insertions, and reversals
Vladimir I Levenshtein. Binary codes capable of correcting deletions, insertions, and reversals. Soviet physics doklady , 10:707–710, 1966
work page 1966
-
[30]
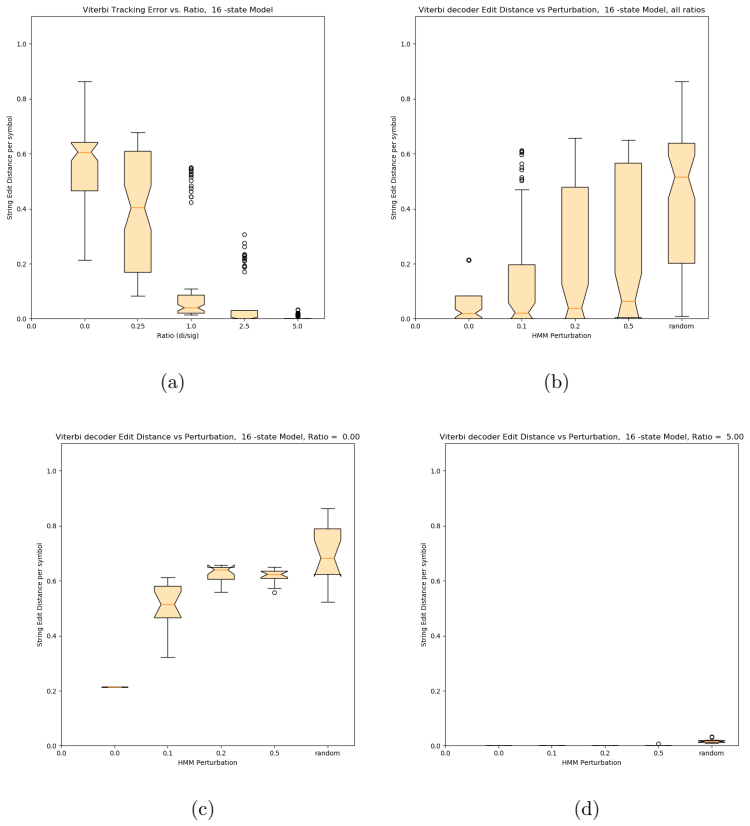
Raffay Hamid, Yan Huang, and Irfan Essa. Argmode-activity recognition using graphical models. In 2003 Conference on Computer Vision and Pattern Recognition Workshop , volume 4, pages 38–38. IEEE, 2003. 14 (a) (b) (c) (d) Figure 6: Viterbi Algorithm state tracking error (string edit distance per symbol, SED) of 16 state model. Upper Left: SED vs Ratio, R, f...
work page 2003
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.