Partial-differential-algebraic equations of nonlinear dynamics by Physics-Informed Neural-Network: (I) Operator splitting and framework assessment
Pith reviewed 2026-05-23 22:55 UTC · model grok-4.3
The pith
Derivative operator splitting lets PINNs solve PDAEs directly from the highest-level balance-of-momenta form
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Several new PINN formulations are obtained by splitting the derivative operators in the PDAE system; these formulations evolve from low-level to high-level versions and allow the balance-of-momenta equations themselves to be used as the starting point. The resulting networks are applied to the nonlinear Kirchhoff rod, the JAX script reproduces results without the instabilities seen in DeepXDE-TensorFlow, and the higher-level forms turn out to be more efficient than the lower-level ones in that implementation.
What carries the argument
Derivative operator splitting applied to construct the residual terms of a PINN loss directly from high-level PDAE balance equations
If this is right
- The balance-of-momenta form can be fed directly to the network, eliminating the error-prone manual reduction to lower-level equations.
- Higher-level forms become practically usable and sometimes more efficient than their reduced counterparts.
- A standardized normalization step in the training loop makes learning-rate choices reproducible across runs.
- The JAX script avoids the specific convergence failures documented for DeepXDE with TensorFlow on the same rod problem.
Where Pith is reading between the lines
- The same splitting pattern could be tested on other PDAE systems such as beams with large deformation or fluid-structure interaction.
- Codifying the training normalization may shorten the trial-and-error phase when PINNs are first applied to a new nonlinear model.
- If the higher-level forms remain stable, automatic code generation from symbolic balance laws could become feasible without intermediate reduction steps.
Load-bearing premise
The split-operator PDAE forms together with the JAX training procedure can produce accurate solutions for the Kirchhoff rod system without new instabilities or extensive per-problem retuning.
What would settle it
Execute the supplied JAX script on the Kirchhoff rod PDAE and compare the resulting time histories of displacement and rotation against an independent reference solution obtained by a conventional finite-element discretization; systematic deviation beyond discretization error falsifies the claim.
Figures


















































read the original abstract
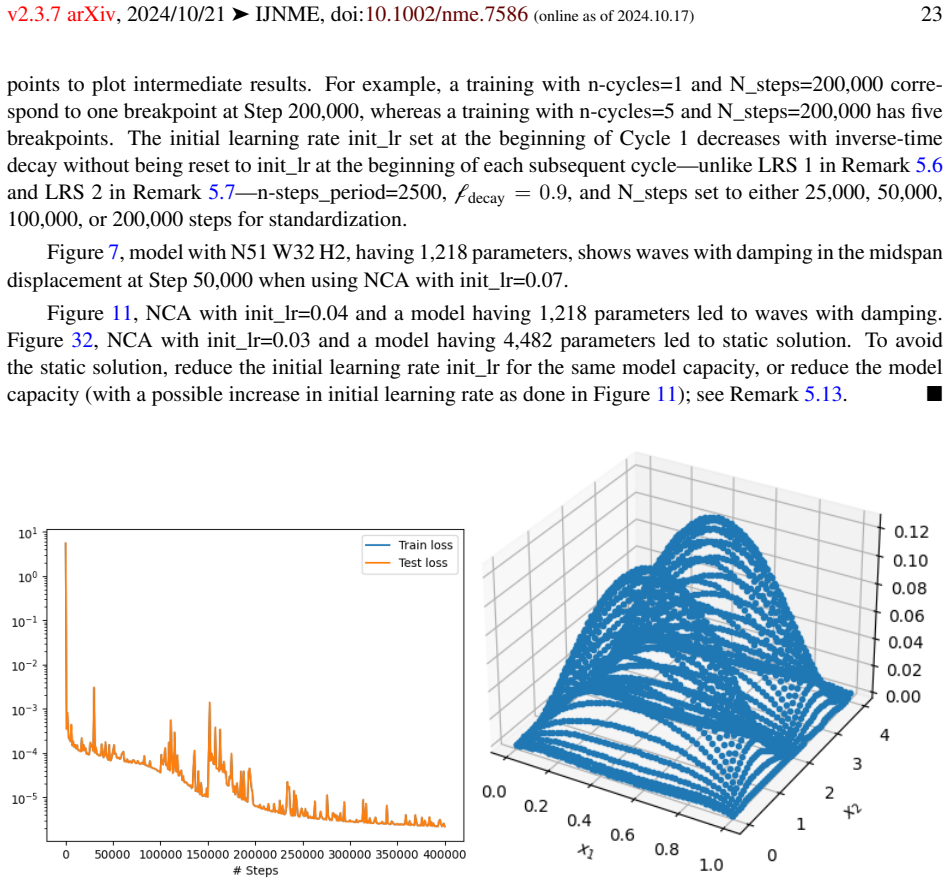
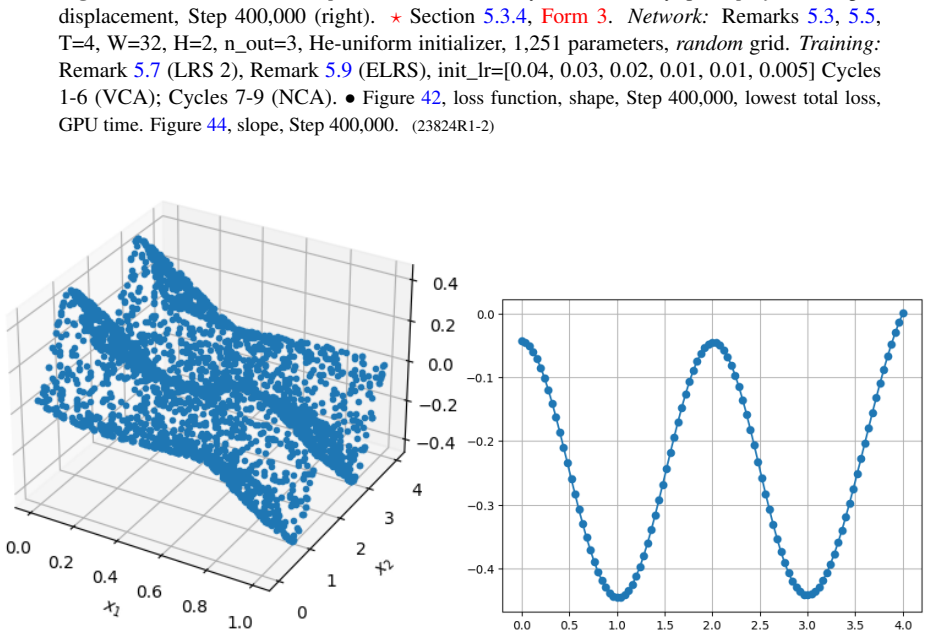
Several forms for constructing novel physics-informed neural-networks (PINN) for the solution of partial-differential-algebraic equations based on derivative operator splitting are proposed, using the nonlinear Kirchhoff rod as a prototype for demonstration. The open-source DeepXDE is likely the most well documented framework with many examples. Yet, we encountered some pathological problems and proposed novel methods to resolve them. Among these novel methods are the PDE forms, which evolve from the lower-level form with fewer unknown dependent variables to higher-level form with more dependent variables, in addition to those from lower-level forms. Traditionally, the highest-level form, the balance-of-momenta form, is the starting point for (hand) deriving the lowest-level form through a tedious (and error prone) process of successive substitutions. The next step in a finite element method is to discretize the lowest-level form upon forming a weak form and linearization with appropriate interpolation functions, followed by their implementation in a code and testing. The time-consuming tedium in all of these steps could be bypassed by applying the proposed novel PINN directly to the highest-level form. We developed a script based on JAX. While our JAX script did not show the pathological problems of DDE-T (DDE with TensorFlow backend), it is slower than DDE-T. That DDE-T itself being more efficient in higher-level form than in lower-level form makes working directly with higher-level form even more attractive in addition to the advantages mentioned further above. Since coming up with an appropriate learning-rate schedule for a good solution is more art than science, we systematically codified in detail our experience running optimization through a normalization/standardization of the network-training process so readers can reproduce our results.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes novel PINN constructions for PDAEs based on derivative operator splitting, using the nonlinear Kirchhoff rod as a prototype. It identifies pathological issues in DeepXDE (particularly with TensorFlow backend), introduces PDE forms that evolve from lower- to higher-level representations with more dependent variables, and presents a JAX implementation claimed to avoid these pathologies while being slower but more efficient on higher-level forms. The authors codify their normalization/standardization process for the learning-rate schedule to enable reproduction and argue that direct application to the highest-level balance-of-momenta form bypasses tedious hand derivations.
Significance. If the operator-splitting forms and JAX training are shown to produce solutions whose residuals on the unsplit PDAE remain small, the work could reduce the derivation burden for complex PDAEs and make higher-level forms practical for PINNs. The explicit codification of the training workflow is a positive step toward reproducibility. However, the absence of quantitative residual checks or reference comparisons in the provided description limits the immediate significance.
major comments (2)
- [Results / Numerical experiments] The central claim requires that the proposed splitting forms plus JAX training yield solutions with small residuals on the original unsplit balance-of-momenta PDAE. The manuscript reports only the composite loss on the Kirchhoff rod but provides no explicit evaluation of the unsplit differential-algebraic residuals on a held-out grid or comparison against a reference FEM solution; this verification is load-bearing for the claim that the splitting does not relax algebraic constraints or introduce O(1) local errors.
- [Numerical experiments / Tables or figures] No quantitative error metrics (e.g., L2 residuals, pointwise errors, or convergence rates with respect to network size or collocation points) are reported for either the split or unsplit forms, making it impossible to assess whether the JAX implementation achieves the accuracy needed to support the assertion that higher-level forms are attractive.
minor comments (2)
- [Introduction] The abstract and description refer to 'pathological problems' in DeepXDE without specifying the exact failure modes (e.g., divergence, constraint violation, or NaN values), which would help readers understand the precise advantage of the new splitting.
- [Implementation / Comparison with DeepXDE] The claim that the JAX script 'did not show the pathological problems' should be supported by a direct side-by-side comparison table of failure rates or loss behavior under identical network architectures and collocation strategies.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments. We address the major comments point by point below.
read point-by-point responses
-
Referee: [Results / Numerical experiments] The central claim requires that the proposed splitting forms plus JAX training yield solutions with small residuals on the original unsplit balance-of-momenta PDAE. The manuscript reports only the composite loss on the Kirchhoff rod but provides no explicit evaluation of the unsplit differential-algebraic residuals on a held-out grid or comparison against a reference FEM solution; this verification is load-bearing for the claim that the splitting does not relax algebraic constraints or introduce O(1) local errors.
Authors: We agree that explicit verification of residuals on the unsplit PDAE is essential to confirm the splitting preserves constraints without O(1) errors. The composite loss is constructed to enforce the original equations via the split operators, but we acknowledge that direct evaluation on a held-out grid and FEM comparison would provide stronger substantiation. We will add these quantitative residual checks in the revised manuscript. revision: yes
-
Referee: [Numerical experiments / Tables or figures] No quantitative error metrics (e.g., L2 residuals, pointwise errors, or convergence rates with respect to network size or collocation points) are reported for either the split or unsplit forms, making it impossible to assess whether the JAX implementation achieves the accuracy needed to support the assertion that higher-level forms are attractive.
Authors: We agree that quantitative metrics are needed to rigorously assess accuracy and the attractiveness of higher-level forms. The manuscript prioritizes demonstration of pathology avoidance and training reproducibility, but we will incorporate L2 residuals, pointwise errors, and convergence rates with respect to network size and collocation points for both forms in the revision. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The manuscript introduces new operator-splitting PINN formulations that start from the highest-level balance-of-momenta PDAE and evolve both upward and downward in dependent-variable count; these constructions are presented as original proposals, implemented in a custom JAX script, and tested empirically on the Kirchhoff rod against DeepXDE. No self-citations appear as load-bearing premises, no fitted parameters are relabeled as predictions, and no uniqueness theorems or ansatzes are imported from prior author work. The central claims therefore rest on independent construction plus numerical demonstration rather than reducing to the inputs by definition.
Axiom & Free-Parameter Ledger
free parameters (1)
- learning-rate schedule
Reference graph
Works this paper leans on
- [2]
-
[4]
Dill, E. H. (1992). Kirchhoff’s theory of rods. Archive for History of Exact Sciences , 44, 1–23. DOI 10.1007/BF00379680. 2
-
[5]
Neukirch, S., Yavari, M., Challamel, N., Thomas, O. (2021). Comparison of the V on Kármán and Kirchhoff models for the post-buckling and vibrations of elastic beams. Journal of Theoretical, Com- putational and Applied Mechanics, (May). DOI: 10.46298/jtcam.6828. 2, 3
-
[6]
Simo, J. C. (1982). A Consistent Formulation of Nonlinear Theories of Elastic Beams and Plates. PhD dissertation, Civil Engineering, University of California at Berkeley, November. 2
work page 1982
-
[7]
Simo, J. C., Hjelmstad, K. D., Taylor, R. L. (1984). Numerical formulations of elasto-viscoplastic response of beams accounting for the effect of shear. Computer Methods in Applied Mechanics and Engineering, 42(3), 301–330. 2
work page 1984
-
[8]
Simo, J. C. (1985). A finite strain beam formulation. The three-dimensional dynamic problem. Part I. Computer Methods in Applied Mechanics and Engineering, 49(1), 55–70. 2
work page 1985
-
[9]
Karniadakis, G. E., Kevrekidis, I. G., Lu, L., Perdikaris, P., Wang, S., et al. (2021). Physics-informed machine learning. Nature Reviews Physics, 3(6), 422–440. Original website. 3
work page 2021
-
[10]
S., Giampaolo, F., Rozza, G., Raissi, M., et al
Cuomo, S., di Cola, V . S., Giampaolo, F., Rozza, G., Raissi, M., et al. (2022). Scientific Machine Learning through Physics-Informed Neural Networks: Where we are and What’s next. Journal of Scientific Computing, 92(3). Article No. 88, Original website, arXiv:2201.05624. 3
-
[11]
Lagaris, I. E., Likas, A., Fotiadis, D. I. (1998). Artificial neural networks for solving ordinary and partial differential equations. IEEE transactions on neural networks, 9(5), 987–1000. Original website. 3
work page 1998
-
[12]
Lagaris, I. E., Likas, A. C., Papageorgiou, D. G. (2000). Neural-network methods for boundary value problems with irregular boundaries. IEEE Transactions on Neural Networks, 11(5), 1041–1049. Origi- nal website. 3
work page 2000
- [13]
-
[14]
Bazmara, M., Silani, M., Mianroodi, M., Sheibanian, M. (2023). Physics-informed neural net- works for nonlinear bending of 3D functionally graded beam. Structures, 49, 152–162. DOI: 10.1016/j.istruc.2023.01.115. 3
-
[15]
Zienkiewicz, O. C., Taylor, R. L., Zhu, J. Z. (2013). The Finite Element Method: Its Basis & Funda- mentals. 7th edition. Butterworth-Heinemann. FEAPpv, Project page, Internet archived 2023.03.31. 3
work page 2013
-
[16]
Zienkiewicz, O. C., Taylor, R. L., Fox, D. D. (2014). The Finite Element Method for Solid & Structural Mechanics. 7th edition. Elsevier India. 3
work page 2014
-
[17]
Zienkiewicz, O. C., Taylor, R. L., Nithiarasu, P. (2013).The Finite Element Method for Fluid Dynamics. 7th edition. Butterworth-Heinemann. 3
work page 2013
-
[19]
Schoeberl, J. (2014). C++11 Implementation of Finite Elements in NGSolve. Technical report ASC No. 30/2014, Institute for Analysis and Scientific Computing, Vienna University of Technology, TU Wien. Internet archived 2022.08.03. Netgen/NGSolve website. 3
work page 2014
-
[20]
Simo, J., Vu-Quoc, L. (1986). On the dynamics of flexible beams under large overall motions—The plane case: Part I. ASME Journal of Applied Mechanics, 53, 849–854. Dec. 10, 11
work page 1986
-
[21]
Reissner, E. (1972). On one-dimensional finite-strain beam theory: the plane problem. Zeitschrift für angewandte Mathematik und Physik ZAMP, 23(5), 795–804. 11
work page 1972
-
[22]
Nafis, N. (2021). The story behind ‘random.seed(42)’ in machine learning. Geek Culture, Medium , (Aug 3). Original website. See also Leticia B. (2018), The Story of Seed(42). 17
work page 2021
-
[23]
Nocedal, J., Wright, S. (2006). Numerical Optimization. Springer, New York. 2nd edition. 57
work page 2006
-
[24]
Fiacco, A. V ., McCormick, G. P. (1990). Nonlinear Programming: Sequential Unconstrained Mini- mization Techniques. SIAM, Philadelphia. Series Classics in Applied Mathematics. 57
work page 1990
-
[25]
Frisch, K. R. (1955). The logarithmic potential method of convex programming . Technical report. University Institute of Economics, Oslo, Norway. 57
work page 1955
-
[26]
Frisch, K. R. (1954). Principles of Linear Programming—With Particular Reference to the Double Gra- dient Form of the Logarithmic Potential Method. Technical report. University Institute of Economics, Oslo, Norway. 57
work page 1954
-
[27]
Carroll, C. W. (1959). An Operations Research Approach to the Economic Optimization of a Kraft Pulping Process. Ph.D. dissertation, Institute of Paper Chemistry, Appleton, Wisconsin. 57
work page 1959
-
[28]
Carroll, C. W. (1961). The Created Response Surface Technique for Optimizing Nonlinear Restrained Systems. Operations Research, 9(2), 169–184. 57 v2.3.7 arXiv, 2024/10/21 ➤ IJNME, doi:10.1002/nme.7586 (online as of 2024.10.17) 53 Appendices 1 Analysis of time shift and amplification First, we analyze the computed solution of Form 1 of the axial motion of ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.