SoFFT: Spatial Fourier Transform for Modeling Continuum Soft Robots
Pith reviewed 2026-05-23 02:04 UTC · model grok-4.3
The pith
Treating a soft robot backbone as a space-time signal lets the Fourier transform represent its deformation with fewer variables while keeping accuracy
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
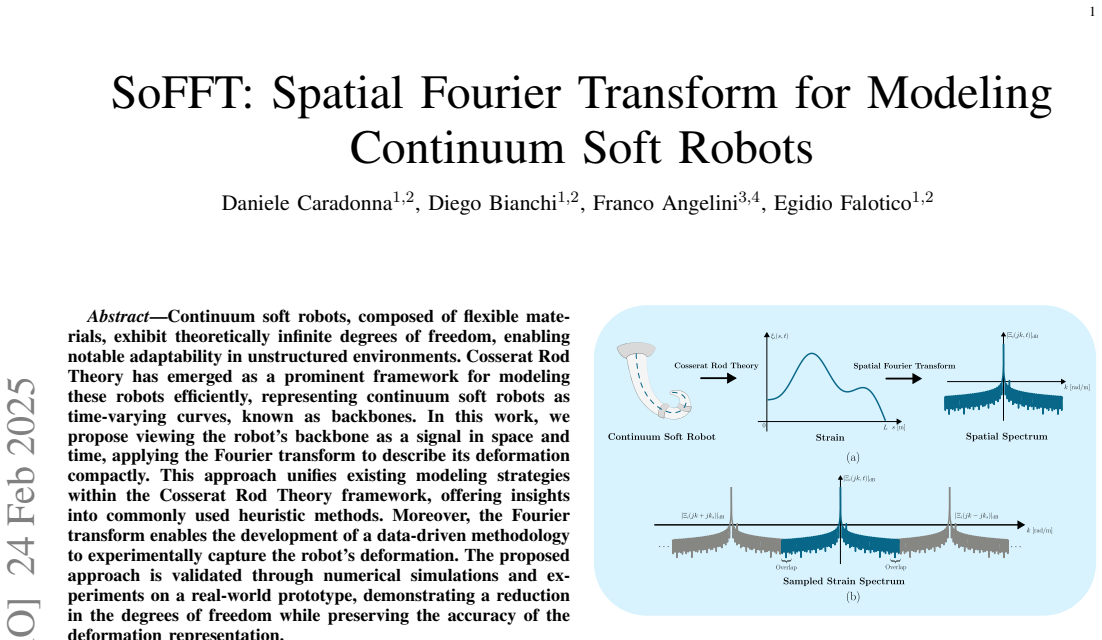
Viewing the robot's backbone as a signal in space and time, the Fourier transform describes its deformation compactly. This unifies existing modeling strategies within the Cosserat Rod Theory framework and enables a data-driven methodology to experimentally capture the robot's deformation. Validation through numerical simulations and experiments on a real-world prototype demonstrates a reduction in the degrees of freedom while preserving the accuracy of the deformation representation.
What carries the argument
The spatial Fourier transform applied to the time-varying backbone curve, which converts the infinite-dimensional shape into a finite set of frequency coefficients that reconstruct the deformation.
If this is right
- Unifies existing modeling strategies within Cosserat Rod Theory
- Offers insights into commonly used heuristic methods
- Enables a data-driven methodology to experimentally capture the robot's deformation
- Demonstrates reduction in the degrees of freedom while preserving the accuracy of the deformation representation in simulations and experiments
Where Pith is reading between the lines
- The frequency coefficients could serve as a natural low-dimensional state for feedback controllers that run faster than full Cosserat simulations.
- The same signal view might apply directly to other rod-like continua such as cables or plant stems where deformation data are available.
- Truncation to low frequencies could act as an implicit smoother that reduces the effect of sensor noise during model fitting from experiments.
- Integration with learning methods becomes straightforward because the coefficients form a fixed-size vector that can be regressed from limited observations.
Load-bearing premise
The robot backbone deformation must be smooth and band-limited enough that only a small number of Fourier terms capture the essential shape changes without large truncation error.
What would settle it
Measure the position mismatch between a physical soft robot's actual backbone (from motion capture) and the shape rebuilt from a low-order Fourier series; if the average error grows beyond a few percent of the robot length across typical bending motions, the accuracy claim does not hold.
Figures















read the original abstract
Continuum soft robots, composed of flexible materials, exhibit theoretically infinite degrees of freedom, enabling notable adaptability in unstructured environments. Cosserat Rod Theory has emerged as a prominent framework for modeling these robots efficiently, representing continuum soft robots as time-varying curves, known as backbones. In this work, we propose viewing the robot's backbone as a signal in space and time, applying the Fourier transform to describe its deformation compactly. This approach unifies existing modeling strategies within the Cosserat Rod Theory framework, offering insights into commonly used heuristic methods. Moreover, the Fourier transform enables the development of a data-driven methodology to experimentally capture the robot's deformation. The proposed approach is validated through numerical simulations and experiments on a real-world prototype, demonstrating a reduction in the degrees of freedom while preserving the accuracy of the deformation representation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes SoFFT, a spatial Fourier transform applied to the backbone curve of continuum soft robots within Cosserat rod theory. It claims this yields a compact representation that unifies existing modeling heuristics, enables data-driven experimental capture of deformation, and achieves a reduction in degrees of freedom while preserving accuracy, as shown in numerical simulations and real-world prototype experiments.
Significance. If the quantitative validation holds, the approach could supply a principled, frequency-domain basis for dimensionality reduction in infinite-DOF soft-robot models, offering a bridge between analytical Cosserat formulations and data-driven methods while clarifying the spectral content implicit in common heuristics.
major comments (3)
- [Abstract] Abstract: the claim that the method demonstrates 'a reduction in the degrees of freedom while preserving the accuracy of the deformation representation' is unsupported by any reported error metrics, baseline comparisons (e.g., against full-order Cosserat or other reduced models), or truncation-order details; this quantitative gap is load-bearing for the central validation claim.
- [Abstract] The weakest assumption—that backbone position/orientation functions are sufficiently band-limited for low-order truncation to incur negligible error—is not tested against localized high-curvature or multi-mode shapes that arise in general Cosserat dynamics; without such cases the reduction claim cannot be generalized.
- [Abstract] No explicit integration of the Fourier projection into the strain or equilibrium equations is described, leaving open whether the basis introduces artifacts when substituted into the Cosserat PDEs.
minor comments (1)
- [Abstract] The abstract would be strengthened by stating the typical number of retained modes and the observed DOF reduction factor.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments on our manuscript. We address each major comment point by point below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the method demonstrates 'a reduction in the degrees of freedom while preserving the accuracy of the deformation representation' is unsupported by any reported error metrics, baseline comparisons (e.g., against full-order Cosserat or other reduced models), or truncation-order details; this quantitative gap is load-bearing for the central validation claim.
Authors: We agree that the abstract would benefit from explicit quantitative support. The full manuscript contains numerical simulations and prototype experiments that include error metrics, comparisons against the full-order Cosserat model, and results at multiple truncation orders. We will revise the abstract to reference these specific metrics and comparisons. revision: yes
-
Referee: [Abstract] The weakest assumption—that backbone position/orientation functions are sufficiently band-limited for low-order truncation to incur negligible error—is not tested against localized high-curvature or multi-mode shapes that arise in general Cosserat dynamics; without such cases the reduction claim cannot be generalized.
Authors: The presented validation covers a range of deformation modes, yet we acknowledge that additional explicit tests with localized high-curvature and multi-mode shapes would strengthen the generalization of the band-limited assumption. We will incorporate such test cases into the revised manuscript. revision: yes
-
Referee: [Abstract] No explicit integration of the Fourier projection into the strain or equilibrium equations is described, leaving open whether the basis introduces artifacts when substituted into the Cosserat PDEs.
Authors: The manuscript derives the spatial Fourier representation from the Cosserat backbone and demonstrates its use in modeling. To make the substitution explicit, we will add a dedicated paragraph in the methods section detailing how the Fourier projection enters the strain and equilibrium equations, together with a brief discussion of potential artifacts supported by the existing numerical results. revision: yes
Circularity Check
No circularity: Fourier representation introduced as independent modeling choice
full rationale
The paper presents the spatial Fourier transform as a new lens on the Cosserat backbone curve, enabling compact representation and a data-driven capture method. No equations, parameter-fitting procedures, or self-citations are shown that would make any claimed reduction or unification equivalent to its own inputs by construction. The band-limited assumption is stated as a modeling premise rather than derived from the method itself, and the unification with existing Cosserat strategies is described as an insight rather than a tautology. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Design, fabrication and control of soft robots,
D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,” Nature, vol. 521, no. 7553, pp. 467–475, 2015
work page 2015
-
[2]
E. Del Dottore, A. Mondini, N. Rowe, and B. Mazzolai, “A growing soft robot with climbing plant–inspired adaptive behaviors for navigation in unstructured environments,” Science Robotics , vol. 9, no. 86, p. eadi5908, 2024
work page 2024
-
[3]
Model-based control of soft robots: A survey of the state of the art and open challenges,
C. Della Santina, C. Duriez, and D. Rus, “Model-based control of soft robots: A survey of the state of the art and open challenges,” IEEE Control Systems Magazine , vol. 43, no. 3, pp. 30–65, 2023
work page 2023
-
[4]
Control strategies for soft robotic manipulators: A survey,
T. George Thuruthel, Y . Ansari, E. Falotico, and C. Laschi, “Control strategies for soft robotic manipulators: A survey,” Soft robotics, vol. 5, no. 2, pp. 149–163, 2018
work page 2018
-
[5]
Learning controllers for continuum soft manipulators: Impact of modeling and looming challenges,
E. Falotico, E. Donato, C. Alessi, E. Setti, M. S. Nazeer, C. Agabiti, D. Caradonna, D. Bianchi, F. Piqu ´e, Y . T. Ansari et al. , “Learning controllers for continuum soft manipulators: Impact of modeling and looming challenges,” Advanced Intelligent Systems , p. 2400344, 2024
work page 2024
-
[6]
Soft robots modeling: A structured overview,
C. Armanini, F. Boyer, A. T. Mathew, C. Duriez, and F. Renda, “Soft robots modeling: A structured overview,” IEEE Transactions on Robotics, vol. 39, no. 3, pp. 1728–1748, 2023
work page 2023
-
[7]
Dynamic model of a multibending soft robot arm driven by cables,
F. Renda, M. Giorelli, M. Calisti, M. Cianchetti, and C. Laschi, “Dynamic model of a multibending soft robot arm driven by cables,” IEEE Transactions on Robotics , vol. 30, no. 5, pp. 1109–1122, 2014
work page 2014
-
[8]
Forward and inverse problems in the mechanics of soft filaments,
M. Gazzola, L. H. Dudte, A. G. McCormick, and L. Mahadevan, “Forward and inverse problems in the mechanics of soft filaments,” Royal Society open science , vol. 5, no. 6, p. 171628, 2018
work page 2018
-
[9]
A. T. Mathew, I. B. Hmida, C. Armanini, F. Boyer, and F. Renda, “Sorosim: A matlab toolbox for hybrid rigid–soft robots based on the geometric variable-strain approach,” IEEE Robotics & Automation Magazine, vol. 30, no. 3, pp. 106–122, 2022
work page 2022
-
[10]
Elastica: A compliant mechanics environment for soft robotic control,
N. Naughton, J. Sun, A. Tekinalp, T. Parthasarathy, G. Chowdhary, and M. Gazzola, “Elastica: A compliant mechanics environment for soft robotic control,” IEEE Robotics and Automation Letters , vol. 6, no. 2, pp. 3389–3396, 2021
work page 2021
-
[11]
Design and kinematic modeling of constant curvature continuum robots: A review,
R. J. Webster III and B. A. Jones, “Design and kinematic modeling of constant curvature continuum robots: A review,” The International Journal of Robotics Research , vol. 29, no. 13, pp. 1661–1683, 2010
work page 2010
-
[12]
S. Grazioso, G. Di Gironimo, and B. Siciliano, “A geometrically exact model for soft continuum robots: The finite element deformation space formulation,” Soft robotics, vol. 6, no. 6, pp. 790–811, 2019
work page 2019
-
[13]
F. Renda, C. Armanini, V . Lebastard, F. Candelier, and F. Boyer, “A geometric variable-strain approach for static modeling of soft manipula- tors with tendon and fluidic actuation,” IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 4006–4013, 2020
work page 2020
-
[14]
Dynamics of continuum and soft robots: A strain parameterization based approach,
F. Boyer, V . Lebastard, F. Candelier, and F. Renda, “Dynamics of continuum and soft robots: A strain parameterization based approach,” IEEE Transactions on Robotics , vol. 37, no. 3, pp. 847–863, 2020
work page 2020
-
[15]
Control oriented modeling of soft robots: The polynomial curvature case,
C. Della Santina and D. Rus, “Control oriented modeling of soft robots: The polynomial curvature case,” IEEE Robotics and Automation Letters , vol. 5, no. 2, pp. 290–298, 2019
work page 2019
-
[16]
R. N. Bracewell, The F ourier transform and its applications . Second edition. New York : McGraw-Hill, 1978
work page 1978
-
[17]
R. M. Murray, S. S. Sastry, and L. Zexiang, A Mathematical Introduction to Robotic Manipulation , 1st ed. USA: CRC Press, Inc., 1994
work page 1994
-
[18]
Screw- based modeling of soft manipulators with tendon and fluidic actuation,
F. Renda, M. Cianchetti, H. Abidi, J. Dias, and L. Seneviratne, “Screw- based modeling of soft manipulators with tendon and fluidic actuation,” Journal of Mechanisms and Robotics , vol. 9, no. 4, p. 041012, 2017
work page 2017
-
[19]
Discrete cosserat ap- proach for multisection soft manipulator dynamics,
F. Renda, F. Boyer, J. Dias, and L. Seneviratne, “Discrete cosserat ap- proach for multisection soft manipulator dynamics,” IEEE Transactions on Robotics , vol. 34, no. 6, pp. 1518–1533, 2018
work page 2018
-
[20]
B. Siciliano, L. Sciavicco, L. Villani, and G. Oriolo, Robotics: Mod- elling, Planning and Control , 1st ed. Springer Publishing Company, Incorporated, 2008
work page 2008
-
[21]
Dynamic control of soft robots interacting with the environment,
C. Della Santina, R. K. Katzschmann, A. Biechi, and D. Rus, “Dynamic control of soft robots interacting with the environment,” in 2018 IEEE International Conference on Soft Robotics (RoboSoft) . IEEE, 2018, pp. 46–53
work page 2018
-
[22]
The soft inverted pendulum with affine curvature,
C. Della Santina, “The soft inverted pendulum with affine curvature,” in 2020 59th IEEE Conference on Decision and Control (CDC) . IEEE, 2020, pp. 4135–4142
work page 2020
-
[23]
From the elastica compass to the elastica catapult: an essay on the mechanics of soft robot arm,
C. Armanini, F. Dal Corso, D. Misseroni, and D. Bigoni, “From the elastica compass to the elastica catapult: an essay on the mechanics of soft robot arm,” Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , vol. 473, no. 2198, p. 20160870, 2017. 15
work page 2017
-
[24]
Model and control of r-soft inverted pendulum,
D. Caradonna, M. Pierallini, C. Della Santina, F. Angelini, and A. Bic- chi, “Model and control of r-soft inverted pendulum,” IEEE Robotics and Automation Letters , 2024
work page 2024
-
[25]
F. Stella, Q. Guan, C. Della Santina, and J. Hughes, “Piecewise affine curvature model: a reduced-order model for soft robot-environment interaction beyond pcc,” in 2023 IEEE International Conference on Soft Robotics (RoboSoft) . IEEE, 2023, pp. 1–7
work page 2023
-
[26]
Piecewise linear strain cosserat model for soft slender manipulator,
H. Li, L. Xun, and G. Zheng, “Piecewise linear strain cosserat model for soft slender manipulator,” IEEE Transactions on Robotics , vol. 39, no. 3, pp. 2342–2359, 2023
work page 2023
-
[27]
Cosserat-rod based dynamic modeling of soft slender robot interacting with environment,
L. Xun, G. Zheng, and A. Kruszewski, “Cosserat-rod based dynamic modeling of soft slender robot interacting with environment,” IEEE Transactions on Robotics , 2024
work page 2024
-
[28]
E. Hairer, C. Lubich, and G. Wanner, “Geometric numerical integration: Structure-preserving algorithms for ordinary differential equations , volume 31 of springer series in computational mathematics, 2006.”
work page 2006
-
[29]
Collocation and relaxed collocation for the fer and the magnus expansions,
A. Zanna, “Collocation and relaxed collocation for the fer and the magnus expansions,” SIAM journal on numerical analysis , vol. 36, no. 4, pp. 1145–1182, 1999
work page 1999
-
[30]
Dynamics and control of soft robots with implicit strain parametrization,
F. Renda, A. Mathew, and D. F. Talegon, “Dynamics and control of soft robots with implicit strain parametrization,” IEEE Robotics and Automation Letters, 2024
work page 2024
-
[31]
A. T. Mathew, D. Feliu-Talegon, A. Y . Alkayas, F. Boyer, and F. Renda, “Reduced order modeling of hybrid soft-rigid robots using global, local, and state-dependent strain parameterization,” The International Journal of Robotics Research , p. 02783649241262333, 2024
work page 2024
-
[32]
Nonlinear modes as a tool for comparing the mathematical structure of dynamic models of soft robots,
P. Pustina, D. Calzolari, A. Albu-Sch ¨affer, A. De Luca, and C. Della Santina, “Nonlinear modes as a tool for comparing the mathematical structure of dynamic models of soft robots,” in 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft) . IEEE, 2024, pp. 779–785
work page 2024
-
[33]
A. Y . Alkayas, A. T. Mathew, D. Feliu-Talegon, P. Deng, T. G. Thuruthel, and F. Renda, “Soft synergies: Model order reduction of hybrid soft- rigid robots via optimal strain parameterization,” IEEE Transactions on Robotics, p. 1–20, 2024
work page 2024
-
[34]
Fiber optic shape sensors: A comprehensive review,
I. Floris, J. M. Adam, P. A. Calder ´on, and S. Sales, “Fiber optic shape sensors: A comprehensive review,” Optics and Lasers in Engineering , vol. 139, p. 106508, 2021
work page 2021
-
[35]
Motion capture in robotics review,
M. Field, D. Stirling, F. Naghdy, and Z. Pan, “Motion capture in robotics review,” in 2009 IEEE international conference on control and automation. IEEE, 2009, pp. 1697–1702
work page 2009
-
[36]
Continuum robot state estimation using gaussian process regression on se (3),
S. Lilge, T. D. Barfoot, and J. Burgner-Kahrs, “Continuum robot state estimation using gaussian process regression on se (3),” The Interna- tional Journal of Robotics Research , vol. 41, no. 13-14, pp. 1099–1120, 2022
work page 2022
-
[37]
Communication in the presence of noise,
C. E. Shannon, “Communication in the presence of noise,” Proceedings of the IRE , vol. 37, no. 1, pp. 10–21, 1949
work page 1949
-
[38]
Matching pursuits with time-frequency dictionaries,
S. G. Mallat and Z. Zhang, “Matching pursuits with time-frequency dictionaries,” IEEE Transactions on signal processing , vol. 41, no. 12, pp. 3397–3415, 1993
work page 1993
-
[39]
Atomic decomposition by basis pursuit,
S. S. Chen, D. L. Donoho, and M. A. Saunders, “Atomic decomposition by basis pursuit,” SIAM review, vol. 43, no. 1, pp. 129–159, 2001
work page 2001
-
[40]
First-order dynamic modeling and control of soft robots,
T. George Thuruthel, F. Renda, and F. Iida, “First-order dynamic modeling and control of soft robots,”Frontiers in Robotics and AI, vol. 7, p. 95, 2020
work page 2020
-
[41]
Fast image recovery using variable splitting and constrained optimization,
M. V . Afonso, J. M. Bioucas-Dias, and M. A. Figueiredo, “Fast image recovery using variable splitting and constrained optimization,” IEEE transactions on image processing , vol. 19, no. 9, pp. 2345–2356, 2010
work page 2010
-
[42]
Soft assistive robot for personal care of elderly people,
M. Manti, A. Pratesi, E. Falotico, M. Cianchetti, and C. Laschi, “Soft assistive robot for personal care of elderly people,” in 2016 6th IEEE international conference on biomedical robotics and biomechatronics (BioRob). Ieee, 2016, pp. 833–838
work page 2016
-
[43]
D. J. Ewins, Modal testing , 2nd ed., ser. Mechanical Engineering Research Studies: Engineering Dynamics Series. Baldock, England: Research Studies Press, Feb. 1999. Daniele Caradonna earned his M.Sc. degree in Robotics and Automation Engineering from the University of Pisa, Italy, in 2022. He is currently pursuing a Ph.D. in Biorobotics at Scuola Superio...
work page 1999
-
[44]
at the BioRobotics Institute of Scuola Superiore Sant’Anna in Pisa, Italy
Since 2022, he has been pursuing his Ph.D. at the BioRobotics Institute of Scuola Superiore Sant’Anna in Pisa, Italy. His research focuses on the development of learning-based control algorithms and the design of soft robotic systems. Franco Angelini received the B.S. degree in com- puter engineering in 2013 and M.S. degree (cum laude) in automation and r...
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.