Causality-enhanced Decision-Making for Autonomous Mobile Robots in Dynamic Environments
Pith reviewed 2026-05-22 20:40 UTC · model grok-4.3
The pith
Causal models let robots choose better task timing and strategies by estimating human obstructions and battery use in shared spaces.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By leveraging causal inference to model cause-and-effect relationships, the framework estimates battery usage and human obstructions as factors influencing task execution and thereby assists the robot in deciding when and how to complete a given task, with the result that autonomous robots can operate more efficiently and safely in dynamic environments shared with humans.
What carries the argument
The causality-based decision-making framework that reasons over a learned causal model of environmental factors to support choices on task timing and strategy.
If this is right
- Robots can anticipate critical environmental factors more reliably than with correlation-only methods.
- Better decisions on task timing and strategy follow directly from the causal estimates of obstructions and battery drain.
- The PeopleFlow simulator enables systematic benchmarking of interaction-aware planning in large-scale shared workspaces.
- Overall robot operation becomes more efficient and safer when causal reasoning replaces purely reactive or statistical approaches.
Where Pith is reading between the lines
- The same causal structure could be applied to other shared spaces such as hospitals or retail floors without major redesign.
- Updating the causal model online from live sensor data might allow the robot to adapt when human movement patterns change over a shift.
- Integrating the framework with existing path-planning algorithms could create a two-layer system where causal reasoning sets high-level timing and geometry handles low-level motion.
Load-bearing premise
The learned causal model accurately captures the true cause-and-effect relationships for factors like battery usage and human obstructions in the shared workspace.
What would settle it
In repeated runs of the PeopleFlow simulator or in a physical warehouse test, the robot using the causal framework shows no improvement in task completion time, energy use, or collision avoidance compared with the non-causal baseline.
Figures












read the original abstract
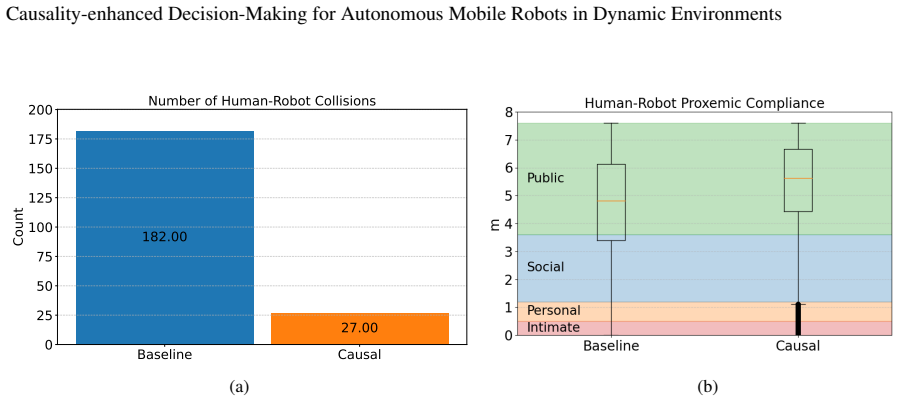
The growing integration of robots in shared environments-such as warehouses, shopping centres, and hospitals-demands a deep understanding of the underlying dynamics and human behaviours, including how, when, and where individuals engage in various activities and interactions. This knowledge goes beyond simple correlation studies and requires a more comprehensive causal analysis. By leveraging causal inference to model cause-and-effect relationships, we can better anticipate critical environmental factors and enable autonomous robots to plan and execute tasks more effectively. To this end, we propose a novel causality-based decision-making framework that reasons over a learned causal model to assist the robot in deciding when and how to complete a given task. In the examined use case-i.e., a warehouse shared with people-we exploit the causal model to estimate battery usage and human obstructions as factors influencing the robot's task execution. This reasoning framework supports the robot in making informed decisions about task timing and strategy. To achieve this, we developed also PeopleFlow, a new Gazebo-based simulator designed to model context-sensitive human-robot spatial interactions in shared workspaces. PeopleFlow features realistic human and robot trajectories influenced by contextual factors such as time, environment layout, and robot state, and can simulate a large number of agents. While the simulator is general-purpose, in this paper we focus on a warehouse-like environment as a case study, where we conduct an extensive evaluation benchmarking our causal approach against a non-causal baseline. Our findings demonstrate the efficacy of the proposed solutions, highlighting how causal reasoning enables autonomous robots to operate more efficiently and safely in dynamic environments shared with humans.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a causality-based decision-making framework for autonomous mobile robots in dynamic environments shared with humans. It learns a causal model to estimate factors such as battery usage and human obstructions, which then informs decisions on task timing and strategy. The approach is evaluated in a warehouse-like setting using a new Gazebo-based simulator (PeopleFlow) that generates context-sensitive human-robot trajectories, with benchmarking against a non-causal baseline; the abstract claims this demonstrates improved efficiency and safety via causal reasoning.
Significance. If the central claim holds after addressing validation concerns, the work could advance robot planning by showing concrete benefits of causal models over correlational baselines in human-shared spaces. The introduction of PeopleFlow as a simulator for large-scale, context-sensitive interactions is a positive, reusable contribution that may support future studies in the field.
major comments (2)
- [Abstract and Evaluation section] Abstract and Evaluation section: The efficacy claim (that reasoning over the learned causal model yields better task decisions than the non-causal baseline) is load-bearing on the model recovering true cause-and-effect relationships for battery usage and obstructions rather than simulator correlations. No description is provided of the causal discovery algorithm, identifiability assumptions, or validation against interventions in PeopleFlow trajectories, leaving open that reported gains could stem from richer state representation alone.
- [PeopleFlow simulator and case-study evaluation] PeopleFlow simulator and case-study evaluation: The framework is tested only in a warehouse-like environment; without explicit checks that the causal structure generalizes beyond the simulator's trajectory generation rules (e.g., via held-out interventions or alternative layouts), the safety and efficiency conclusions remain tied to the specific data-generating process.
minor comments (1)
- [Abstract] Abstract: The sentence 'we developed also PeopleFlow' is grammatically awkward; revise to 'we also developed PeopleFlow'.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which highlight important aspects of our work that require clarification. We address each major comment below and indicate planned revisions to the manuscript.
read point-by-point responses
-
Referee: [Abstract and Evaluation section] The efficacy claim (that reasoning over the learned causal model yields better task decisions than the non-causal baseline) is load-bearing on the model recovering true cause-and-effect relationships for battery usage and obstructions rather than simulator correlations. No description is provided of the causal discovery algorithm, identifiability assumptions, or validation against interventions in PeopleFlow trajectories, leaving open that reported gains could stem from richer state representation alone.
Authors: We agree that the manuscript would benefit from explicit details on these elements to strengthen the causal interpretation of the results. The current text focuses on the application of the learned model to decision-making but does not fully specify the discovery procedure or validation steps. In the revision, we will add a dedicated subsection describing the causal discovery algorithm, the identifiability assumptions (including causal sufficiency for the modeled variables), and results from intervention-based checks on simulator trajectories to confirm that performance gains arise from recovered causal relationships rather than state richness alone. revision: yes
-
Referee: [PeopleFlow simulator and case-study evaluation] The framework is tested only in a warehouse-like environment; without explicit checks that the causal structure generalizes beyond the simulator's trajectory generation rules (e.g., via held-out interventions or alternative layouts), the safety and efficiency conclusions remain tied to the specific data-generating process.
Authors: The evaluation is presented as a focused case study in a warehouse setting, as stated in the abstract and evaluation sections. PeopleFlow itself is designed as a general-purpose simulator supporting varied contexts and layouts. To address the generalization concern, the revised manuscript will include additional experiments using held-out interventions on trajectory rules and tests in alternative environment configurations. These will be reported to show that the learned causal structure and efficiency/safety benefits are not artifacts of the specific warehouse data-generating process. revision: yes
Circularity Check
No circularity: high-level framework with external simulator benchmarks
full rationale
The paper describes a causality-based decision-making framework at a conceptual level, proposing to reason over a learned causal model for estimating battery usage and human obstructions in a warehouse simulator called PeopleFlow. It benchmarks the causal approach against a non-causal baseline and reports efficacy in task timing and strategy. No equations, derivations, or parameter-fitting steps are referenced in the provided text. There are no self-definitional reductions, fitted inputs renamed as predictions, or load-bearing self-citations. The evaluation relies on independent simulator runs and comparisons, keeping the central claim self-contained against external benchmarks rather than reducing to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Causal models can be learned from observational data to accurately represent cause-and-effect relationships in human-robot spatial interactions.
invented entities (1)
-
PeopleFlow simulator
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
we use J-PCMCI+ ... causal inference engine ... P(L=l|do(V=v), C=c) ... heuristic h(wi) = ... λD · D̂(wi) + λL · |L̂(wi,wi+1)|
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
causal model ... battery dynamics ... people density ... context variables
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
euRobotics. A unified vision for european robotics: A strategy for innovation, growth and societal impact, December 2024
work page 2024
-
[2]
National Robotics Initiative 3.0: Innovations in Integration of Robotics (NRI-3.0), 2021
National Science Foundation. National Robotics Initiative 3.0: Innovations in Integration of Robotics (NRI-3.0), 2021. 15https://drive.google.com/file/d/1oBtTpPZbstD2a66BGxG7XdfBZ84MLPM7/view?usp=sharing 23 Causality-enhanced Decision-Making for Autonomous Mobile Robots in Dynamic Environments
work page 2021
-
[3]
Thomas Hellström. The relevance of causation in robotics: A review, categorization, and analysis.Paladyn, Journal of Behavioral Robotics, 12(1):238–255, 2021
work page 2021
-
[4]
A causal approach to tool affordance learning
Jake Brawer, Meiying Qin, and Brian Scassellati. A causal approach to tool affordance learning. InIEEE/RSJ International Conference on Intelligent Robots & Systems (IROS), pages 8394–8399, 2020
work page 2020
-
[5]
Reasoning operational decisions for robots via time series causal inference
Yu Cao, Boyang Li, Qian Li, Adam Stokes, David Ingram, and Aristides Kiprakis. Reasoning operational decisions for robots via time series causal inference. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 6124–6131, 2021
work page 2021
-
[6]
Causal discovery of dynamic models for predicting human spatial interactions
Luca Castri, Sariah Mghames, Marc Hanheide, and Nicola Bellotto. Causal discovery of dynamic models for predicting human spatial interactions. InInternational Conference on Social Robotics, pages 154–164. Springer, 2022
work page 2022
-
[7]
Enhancing causal discovery from robot sensor data in dynamic scenarios
Luca Castri, Sariah Mghames, Marc Hanheide, and Nicola Bellotto. Enhancing causal discovery from robot sensor data in dynamic scenarios. In2nd Conference on Causal Learning and Reasoning, 2023
work page 2023
-
[8]
Garrett Katz, Di Wei Huang, Theresa Hauge, Rodolphe Gentili, and James Reggia. A novel parsimonious cause- effect reasoning algorithm for robot imitation and plan recognition.IEEE Trans. on Cognitive and Developmental Systems, 2018
work page 2018
-
[9]
Using causal analysis to learn specifications from task demonstrations
Daniel Angelov, Yordan Hristov, and Subramanian Ramamoorthy. Using causal analysis to learn specifications from task demonstrations. InProceedings of the 18th International Conference on Autonomous Agents and MultiAgent Systems, AAMAS, pages 1341–1349, 2019
work page 2019
-
[10]
Lee, Jialiang Alan Zhao, Amrita S
Tabitha E. Lee, Jialiang Alan Zhao, Amrita S. Sawhney, Siddharth Girdhar, and Oliver Kroemer. Causal reasoning in simulation for structure and transfer learning of robot manipulation policies. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 4776–4782, 2021
work page 2021
-
[11]
Ricardo Cannizzaro, Jonathan Routley, and Lars Kunze. Towards a causal probabilistic framework for prediction, action-selection & explanations for robot block-stacking tasks. InIEEE/RSJ International Conference on Intelligent Robots & Systems (IROS) Workshop on Causality for Robotics. IEEE, 2023
work page 2023
-
[12]
Ricardo Cannizzaro, Rhys Howard, Paulina Lewinska, and Lars Kunze. Towards probabilistic causal discovery, inference & explanations for autonomous drones in mine surveying tasks. InIEEE/RSJ International Conference on Intelligent Robots & Systems (IROS) Workshop on Causality for Robotics. IEEE, 2023
work page 2023
-
[13]
Car-despot: Causally-informed online pomdp planning for robots in confounded environments
Ricardo Cannizzaro and Lars Kunze. Car-despot: Causally-informed online pomdp planning for robots in confounded environments. InIEEE/RSJ International Conference on Intelligent Robots & Systems (IROS). IEEE, October 2023
work page 2023
-
[14]
Tamlin Love, Antonio Andriella, and Guillem Alenyà. What would i do if. . . ? promoting understanding in hri through real-time explanations in the wild. In2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN), pages 504–509. IEEE, 2024
work page 2024
-
[15]
Towards explainable proactive robot interactions for groups of people in unstructured environments
Tamlin Love, Antonio Andriella, and Guillem Alenyà. Towards explainable proactive robot interactions for groups of people in unstructured environments. InCompanion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, pages 697–701, 2024
work page 2024
-
[16]
Review of causal discovery methods based on graphical models
Clark Glymour, Kun Zhang, and Peter Spirtes. Review of causal discovery methods based on graphical models. Frontiers in genetics, 10:524, 2019
work page 2019
-
[17]
Charles K Assaad, Emilie Devijver, and Eric Gaussier. Survey and evaluation of causal discovery methods for time series.Journal of Artificial Intelligence Research, 73:767–819, 2022
work page 2022
-
[18]
Peter Spirtes, Clark N Glymour, and Richard Scheines.Causation, prediction, and search. MIT press, 2000
work page 2000
-
[19]
Causal network reconstruction from time series: From theoretical assumptions to practical estimation
Jakob Runge. Causal network reconstruction from time series: From theoretical assumptions to practical estimation. Chaos: An Interdisciplinary Journal of Nonlinear Science, 28(7), 2018
work page 2018
-
[20]
Jakob Runge, Peer Nowack, Marlene Kretschmer, Seth Flaxman, and Dino Sejdinovic. Detecting and quantifying causal associations in large nonlinear time series datasets.Science advances, 5(11):eaau4996, 2019
work page 2019
-
[21]
Supat Saetia, Natsue Yoshimura, and Yasuharu Koike. Constructing brain connectivity model using causal network reconstruction approach.Frontiers in Neuroinformatics, 15:619557, 2021
work page 2021
-
[22]
Jakob Runge. Discovering contemporaneous and lagged causal relations in autocorrelated nonlinear time series datasets. InConference on Uncertainty in Artificial Intelligence (UAI), pages 1388–1397. PMLR, 2020
work page 2020
-
[23]
Causal discovery for time series from multiple datasets with latent contexts
Wiebke Günther, Urmi Ninad, and Jakob Runge. Causal discovery for time series from multiple datasets with latent contexts. In Robin J. Evans and Ilya Shpitser, editors,Proceedings of the Thirty-Ninth Conference on Uncertainty in Artificial Intelligence, volume 216 ofProceedings of Machine Learning Research, pages 766–776. PMLR, 31 Jul–04 Aug 2023. 24 Caus...
work page 2023
-
[24]
Andreas Gerhardus and Jakob Runge. High-recall causal discovery for autocorrelated time series with latent confounders.Advances in Neural Information Processing Systems, 33:12615–12625, 2020
work page 2020
-
[25]
Luca Castri, Sariah Mghames, Marc Hanheide, and Nicola Bellotto. Candoit: Causal discovery with observational and interventional data from time series.Advanced Intelligent Systems, 6(12):2400181, 2024
work page 2024
-
[26]
Experimental evaluation of ros-causal in real-world human-robot spatial interaction scenarios
Luca Castri, Gloria Beraldo, Sariah Mghames, Marc Hanheide, and Nicola Bellotto. Experimental evaluation of ros-causal in real-world human-robot spatial interaction scenarios. In2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN), pages 1603–1609, 2024
work page 2024
-
[27]
Debasmita Mukherjee, Kashish Gupta, Li Hsin Chang, and Homayoun Najjaran. A survey of robot learning strategies for human-robot collaboration in industrial settings.Robotics and Computer-Integrated Manufacturing, 73:102231, 2022
work page 2022
-
[28]
Juan P Vasconez, George A Kantor, and Fernando A Auat Cheein. Human–robot interaction in agriculture: A survey and current challenges.Biosystems engineering, 179:35–48, 2019
work page 2019
-
[29]
Roohollah Jahanmahin, Sara Masoud, Jeremy Rickli, and Ana Djuric. Human-robot interactions in manufacturing: A survey of human behavior modeling.Robotics and Computer-Integrated Manufacturing, 78:102404, 2022
work page 2022
-
[30]
Abhinav Dahiya, Alexander M Aroyo, Kerstin Dautenhahn, and Stephen L Smith. A survey of multi-agent human–robot interaction systems.Robotics and Autonomous Systems, 161:104335, 2023
work page 2023
-
[31]
Christian Dondrup, Nicola Bellotto, Marc Hanheide, Kerstin Eder, and Ute Leonards. A computational model of human-robot spatial interactions based on a qualitative trajectory calculus.Robotics, 4(1):63–102, 2015
work page 2015
-
[32]
A neuro-symbolic approach for enhanced human motion prediction
Sariah Mghames, Luca Castri, Marc Hanheide, and Nicola Bellotto. A neuro-symbolic approach for enhanced human motion prediction. In2023 International Joint Conference on Neural Networks (IJCNN), pages 1–8. IEEE, 2023
work page 2023
-
[33]
Qualitative prediction of multi-agent spatial interactions
Sariah Mghames, Luca Castri, Marc Hanheide, and Nicola Bellotto. Qualitative prediction of multi-agent spatial interactions. In2023 32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), pages 1170–1175. IEEE, 2023
work page 2023
-
[34]
Y . Liu, R. Cadei, J. Schweizer, S. Bahmani, and A. Alahi. Towards robust and adaptive motion forecasting: A causal representation perspective. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 17081–17092, 2022
work page 2022
-
[35]
Andrey Rudenko, Tomasz P Kucner, Chittaranjan S Swaminathan, Ravi T Chadalavada, Kai O Arras, and Achim J Lilienthal. Thör: Human-robot navigation data collection and accurate motion trajectories dataset.IEEE Robotics & Automation Letters, pages 676–682, 2020
work page 2020
-
[36]
Tim Schreiter, Tiago Rodrigues de Almeida, Yufei Zhu, Eduardo Gutierrez Maestro, Lucas Morillo-Mendez, Andrey Rudenko, Luigi Palmieri, Tomasz P Kucner, Martin Magnusson, and Achim J Lilienthal. Thör-magni: A large-scale indoor motion capture recording of human movement and robot interaction.The International Journal of Robotics Research, page 027836492412...
work page 2024
-
[37]
Person tracking in large public spaces using 3-d range sensors.IEEE Trans
Dražen Bršˇci´c, Takayuki Kanda, Tetsushi Ikeda, and Takahiro Miyashita. Person tracking in large public spaces using 3-d range sensors.IEEE Trans. on Human-Machine Systems, pages 522–534, 2013
work page 2013
-
[38]
Roberto Martin-Martin, Mihir Patel, Hamid Rezatofighi, Abhijeet Shenoi, JunYoung Gwak, Eric Frankel, Amir Sadeghian, and Silvio Savarese. Jrdb: A dataset and benchmark of egocentric robot visual perception of humans in built environments.IEEE transactions on pattern analysis and machine intelligence, 2021
work page 2021
-
[39]
Sohn, Greg Schwartz, Subashri Ramesh, Mohamed Hussein, Anjali W
Nathan Tsoi, Alec Xiang, Peter Yu, Samuel S. Sohn, Greg Schwartz, Subashri Ramesh, Mohamed Hussein, Anjali W. Gupta, Mubbasir Kapadia, and Marynel Vázquez. Sean 2.0: Formalizing and generating social situations for robot navigation.IEEE Robotics and Automation Letters, pages 1–8, 2022
work page 2022
-
[40]
Mengeros: A crowd simulation tool for autonomous robot navigation
Anoop Aroor, Susan L Epstein, and Raj Korpan. Mengeros: A crowd simulation tool for autonomous robot navigation. InAAAI Fall Symposia, pages 123–125, 2017
work page 2017
-
[41]
Changan Chen, Yuejiang Liu, Sven Kreiss, and Alexandre Alahi. Crowd-robot interaction: Crowd-aware robot navigation with attention-based deep reinforcement learning. In2019 international conference on robotics and automation (ICRA), pages 6015–6022. IEEE, 2019
work page 2019
-
[42]
Socialgym: A framework for benchmarking social robot navigation
Jarrett Holtz and Joydeep Biswas. Socialgym: A framework for benchmarking social robot navigation. In2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 11246–11252. IEEE, 2022
work page 2022
-
[43]
Judea Pearl and Dana Mackenzie.The book of why: the new science of cause and effect. Basic books, 2018
work page 2018
-
[44]
Discretization of time series data.Journal of Computational Biology, 17(6):853–868, 2010
Elena S Dimitrova, M Paola Vera Licona, John McGee, and Reinhard Laubenbacher. Discretization of time series data.Journal of Computational Biology, 17(6):853–868, 2010. 25 Causality-enhanced Decision-Making for Autonomous Mobile Robots in Dynamic Environments
work page 2010
-
[45]
Pratap Dangeti.Statistics for machine learning. Packt Publishing Ltd, 2017
work page 2017
-
[46]
Dynotears: Structure learning from time-series data
Roxana Pamfil, Nisara Sriwattanaworachai, Shaan Desai, Philip Pilgerstorfer, Konstantinos Georgatzis, Paul Beaumont, and Bryon Aragam. Dynotears: Structure learning from time-series data. InInternational Conference on Artificial Intelligence and Statistics, pages 1595–1605. PMLR, 2020
work page 2020
-
[47]
Aapo Hyvärinen, Kun Zhang, Shohei Shimizu, and Patrik O Hoyer. Estimation of a structural vector autoregression model using non-gaussianity.Journal of Machine Learning Research, 11(5), 2010
work page 2010
-
[48]
Doris Entner and Patrik O Hoyer. On causal discovery from time series data using fci.Probabilistic graphical models, pages 121–128, 2010
work page 2010
-
[49]
Estimating causal effects from learned causal networks
Anna K Raichev, Jin Tian, Alexander Ihler, and Rina Dechter. Estimating causal effects from learned causal networks. In9th Causal Inference Workshop at UAI 2024, 2024
work page 2024
-
[50]
Tutorial on maximum likelihood estimation.Journal of mathematical Psychology, 47(1):90–100, 2003
In Jae Myung. Tutorial on maximum likelihood estimation.Journal of mathematical Psychology, 47(1):90–100, 2003
work page 2003
-
[51]
Cambridge university press, 2009
Judea Pearl.Causality. Cambridge university press, 2009
work page 2009
-
[52]
agrum/pyagrum: a toolbox to build models and algorithms for probabilistic graphical models in python
Gaspard Ducamp, Christophe Gonzales, and Pierre-Henri Wuillemin. agrum/pyagrum: a toolbox to build models and algorithms for probabilistic graphical models in python. InInternational Conference on Probabilistic Graphical Models. PMLR, 2020
work page 2020
-
[53]
Ros-causal: A ros-based causal analysis framework for human-robot interaction applications
Luca Castri, Gloria Beraldo, Sariah Mghames, Marc Hanheide, and Nicola Bellotto. Ros-causal: A ros-based causal analysis framework for human-robot interaction applications. InWorkshop on Causal Learning for Human-Robot Interaction (Causal-HRI), ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2024
work page 2024
-
[54]
Social force model for pedestrian dynamics.Physical review E, 51(5):4282, 1995
Dirk Helbing and Peter Molnar. Social force model for pedestrian dynamics.Physical review E, 51(5):4282, 1995
work page 1995
-
[55]
Goran Dukic and Tihomir Opetuk. Warehouse layouts. InWarehousing in the Global Supply Chain: Advanced Models, Tools and Applications for Storage Systems, pages 55–69. Springer, 2012
work page 2012
-
[56]
Battery charge scheduling in long-life autonomous mobile robots
Milan Tomy, Bruno Lacerda, Nick Hawes, and Jeremy L Wyatt. Battery charge scheduling in long-life autonomous mobile robots. In2019 European Conference on Mobile Robots (ECMR), pages 1–6. IEEE, 2019
work page 2019
-
[57]
Milan Tomy, Bruno Lacerda, Nick Hawes, and Jeremy L Wyatt. Battery charge scheduling in long-life au- tonomous mobile robots via multi-objective decision making under uncertainty.Robotics and Autonomous Systems, 133:103629, 2020
work page 2020
-
[58]
Giuseppe Fragapane, Rene De Koster, Fabio Sgarbossa, and Jan Ola Strandhagen. Planning and control of autonomous mobile robots for intralogistics: Literature review and research agenda.European Journal of Operational Research, 294(2):405–426, 2021
work page 2021
-
[59]
Elisa Tosello, Paolo Bonel, Alberto Buranello, Marco Carraro, Alessandro Cimatti, Lorenzo Granelli, Stefan Panjkovic, and Andrea Micheli. Opportunistic (re) planning for long-term deep-ocean inspection: An autonomous underwater architecture.IEEE Robotics & Automation Magazine, 2024
work page 2024
-
[60]
Energy modeling and power measurement for mobile robots
Linfei Hou, Liang Zhang, and Jongwon Kim. Energy modeling and power measurement for mobile robots. Energies, 12(1):27, 2018
work page 2018
-
[61]
Thomas Meneweger, Daniela Wurhofer, Verena Fuchsberger, and Manfred Tscheligi. Factory workers’ ordinary user experiences: An overlooked perspective.Human Technology, 14(2):209–232, 2018
work page 2018
-
[62]
Christoforos I Mavrogiannis and Ross A Knepper. Multi-agent path topology in support of socially competent navigation planning.The International Journal of Robotics Research, 38(2-3):338–356, 2019
work page 2019
-
[63]
Christoforos Mavrogiannis and Ross A Knepper. Hamiltonian coordination primitives for decentralized multiagent navigation.The International Journal of Robotics Research, 40(10-11):1234–1254, 2021
work page 2021
-
[64]
The office marathon: Robust navigation in an indoor office environment
Eitan Marder-Eppstein, Eric Berger, Tully Foote, Brian Gerkey, and Kurt Konolige. The office marathon: Robust navigation in an indoor office environment. In2010 IEEE international conference on robotics and automation, pages 300–307. IEEE, 2010
work page 2010
-
[65]
The navigation based on hybrid a star and teb algorithm implemented in obstacles avoidance
Hongzhang Zheng, Min Dai, Zhisheng Zhang, Zhijie Xia, Guifu Zhang, and Fang Jia. The navigation based on hybrid a star and teb algorithm implemented in obstacles avoidance. In2023 29th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), pages 1–6. IEEE, 2023
work page 2023
-
[66]
Pedestrian-movement prediction based on mixed markov-chain model
Akinori Asahara, Kishiko Maruyama, Akiko Sato, and Kouichi Seto. Pedestrian-movement prediction based on mixed markov-chain model. InProceedings of the 19th ACM SIGSPATIAL international conference on advances in geographic information systems, pages 25–33, 2011. 26 Causality-enhanced Decision-Making for Autonomous Mobile Robots in Dynamic Environments
work page 2011
-
[67]
Hongyi Liu and Lihui Wang. Human motion prediction for human-robot collaboration.Journal of Manufacturing Systems, 44:287–294, 2017
work page 2017
- [68]
-
[69]
Path planning of a mobile robot using genetic heuristics.Robotica, 16(5):575–588, 1998
Andreas C Nearchou. Path planning of a mobile robot using genetic heuristics.Robotica, 16(5):575–588, 1998
work page 1998
-
[70]
N. Sariff and N. Buniyamin. An overview of autonomous mobile robot path planning algorithms. In2006 4th Student Conference on Research and Development, pages 183–188, 2006
work page 2006
-
[71]
Chee Sheng Tan, Rosmiwati Mohd-Mokhtar, and Mohd Rizal Arshad. A comprehensive review of coverage path planning in robotics using classical and heuristic algorithms.IEEE Access, 9:119310–119342, 2021
work page 2021
-
[72]
Searching for a safe shortest path in a warehouse
Aurélien Mombelli, Alain Quilliot, and Mourad Baiou. Searching for a safe shortest path in a warehouse. In11th International Conference on Operations Research and Enterprise Systems, 2022
work page 2022
-
[73]
Bo Yang, Wentao Li, Jianrong Wang, Jingjie Yang, Tiantian Wang, and Xin Liu. A novel path planning algorithm for warehouse robots based on a two-dimensional grid model.IEEE Access, 8:80347–80357, 2020
work page 2020
-
[74]
Motion planning for a chain of mobile robots using a* and potential field.Robotics, 7(2):20, 2018
Apoorva, Rahul Gautam, and Rahul Kala. Motion planning for a chain of mobile robots using a* and potential field.Robotics, 7(2):20, 2018
work page 2018
-
[75]
Mun-Kit Ng, Yung-Wey Chong, Kwang-man Ko, Young-Hoon Park, and Yu-Beng Leau. Adaptive path finding algorithm in dynamic environment for warehouse robot.Neural Computing and Applications, 32(17):13155– 13171, 2020
work page 2020
-
[76]
Agv path planning based on improved a-star algorithm
Dengxing Zhang, Chen Chen, and Guanyu Zhang. Agv path planning based on improved a-star algorithm. In2024 IEEE 7th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), volume 7, pages 1590–1595. IEEE, 2024
work page 2024
-
[77]
Springer Science & Business Media, 2006
Gregory Gutin and Abraham P Punnen.The traveling salesman problem and its variations, volume 12. Springer Science & Business Media, 2006
work page 2006
-
[78]
How, Haresh Karnan, Tsang-Wei Edward Lee, Luis J
Anthony Francis, Claudia Perez-D’Arpino, Chengshu Li, Fei Xia, Alexandre Alahi, Rachid Alami, Aniket Bera, Abhijat Biswas, Joydeep Biswas, Rohan Chandra, Hao-Tien Lewis Chiang, Michael Everett, Sehoon Ha, Justin Hart, Jonathan P. How, Haresh Karnan, Tsang-Wei Edward Lee, Luis J. Manso, Reuth Mirksy, Soeren Pirk, Phani Teja Singamaneni, Peter Stone, Ada V ...
work page 2024
-
[79]
Christoforos Mavrogiannis, Francesca Baldini, Allan Wang, Dapeng Zhao, Pete Trautman, Aaron Steinfeld, and Jean Oh. Core challenges of social robot navigation: A survey.ACM Transactions on Human-Robot Interaction, 12(3):1–39, 2023
work page 2023
-
[80]
Proxemics [and comments and replies]
Edward T Hall, Ray L Birdwhistell, Bernhard Bock, Paul Bohannan, A Richard Diebold Jr, Marshall Durbin, Munro S Edmonson, JL Fischer, Dell Hymes, Solon T Kimball, et al. Proxemics [and comments and replies]. Current anthropology, 9(2/3):83–108, 1968
work page 1968
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.