An Efficient Real-Time Planning Method for Swarm Robotics Based on an Optimal Virtual Tube
Pith reviewed 2026-05-22 16:58 UTC · model grok-4.3
The pith
A homotopic planning framework for robot swarms approximates optimal virtual tubes with affine functions to enable low-cost, high-frequency replanning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
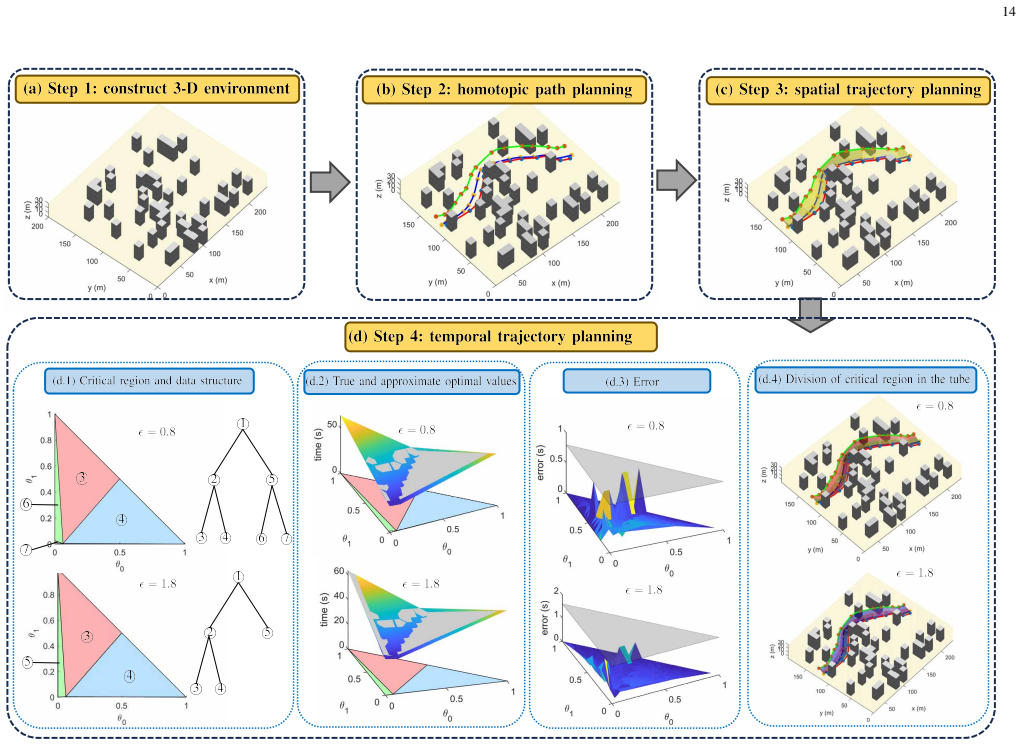
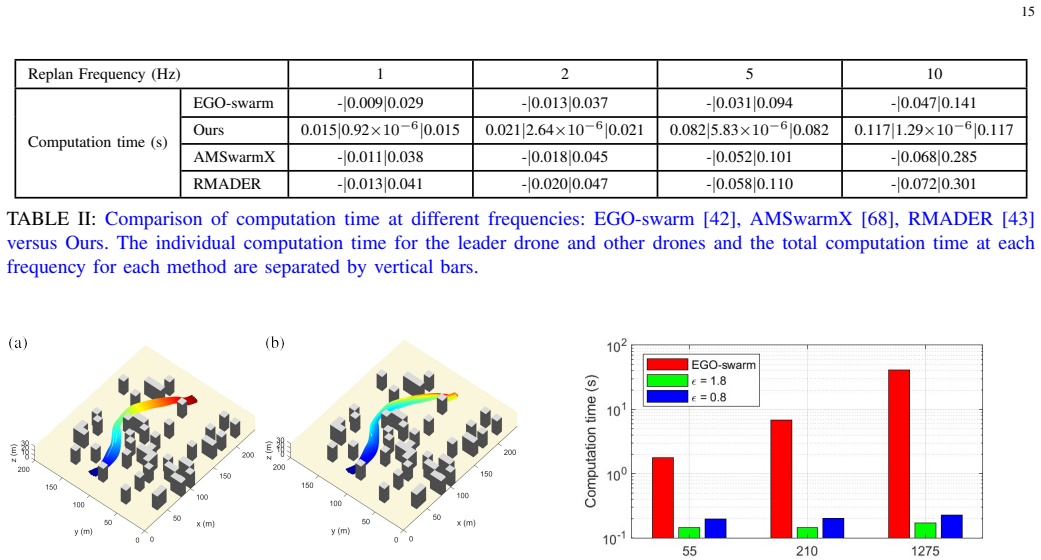
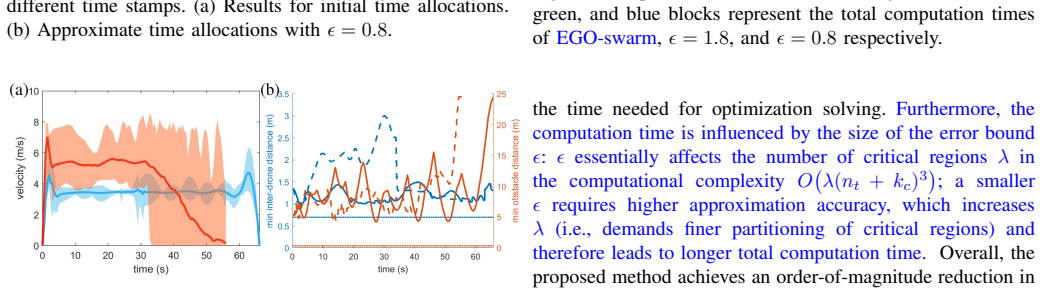
The paper claims that homotopic optimal trajectories from virtual tube planning can be replaced by affine approximations obtained through multi-parametric programming. These approximations retain enough of the original homotopic properties and collision-avoidance guarantees to support safe operation when paired with distributed control, yielding overall planning complexity O(n_t) that makes real-time centralized replanning feasible for swarms.
What carries the argument
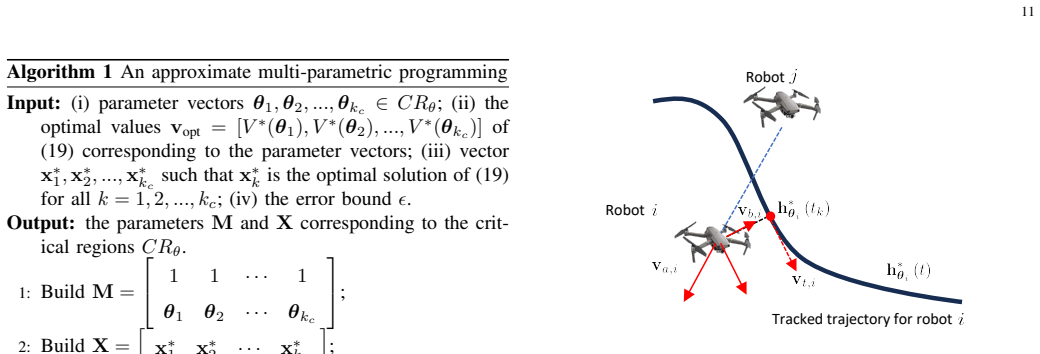
The optimal virtual tube, which generates a class of homotopic trajectories for the swarm and is then replaced by affine functions computed via multi-parametric programming to keep planning cost linear.
If this is right
- Centralized planning becomes feasible for dozens of robots at once without exceeding onboard compute limits.
- Replanning rate rises because each cycle costs only linear time in the trajectory parameters.
- Distributed execution still respects the collision-free homotopic corridors computed centrally.
- The method works in previously unseen obstacle layouts as long as the approximation error stays within safe bounds.
Where Pith is reading between the lines
- The same approximation technique could be applied to three-dimensional or time-varying obstacle fields if the parametric program is extended accordingly.
- Integration with onboard mapping modules would let the swarm update the virtual tube constraints on the fly from fresh sensor data.
- Energy use might drop because the affine paths tend to be smoother than purely reactive corrections.
- Heterogeneous swarms with robots of different speeds could still share a common virtual tube if the affine model accounts for individual dynamics.
Load-bearing premise
The affine approximations preserve the homotopic properties and collision-avoidance guarantees of the original optimal virtual tube trajectories sufficiently for safe operation in unknown obstacle environments.
What would settle it
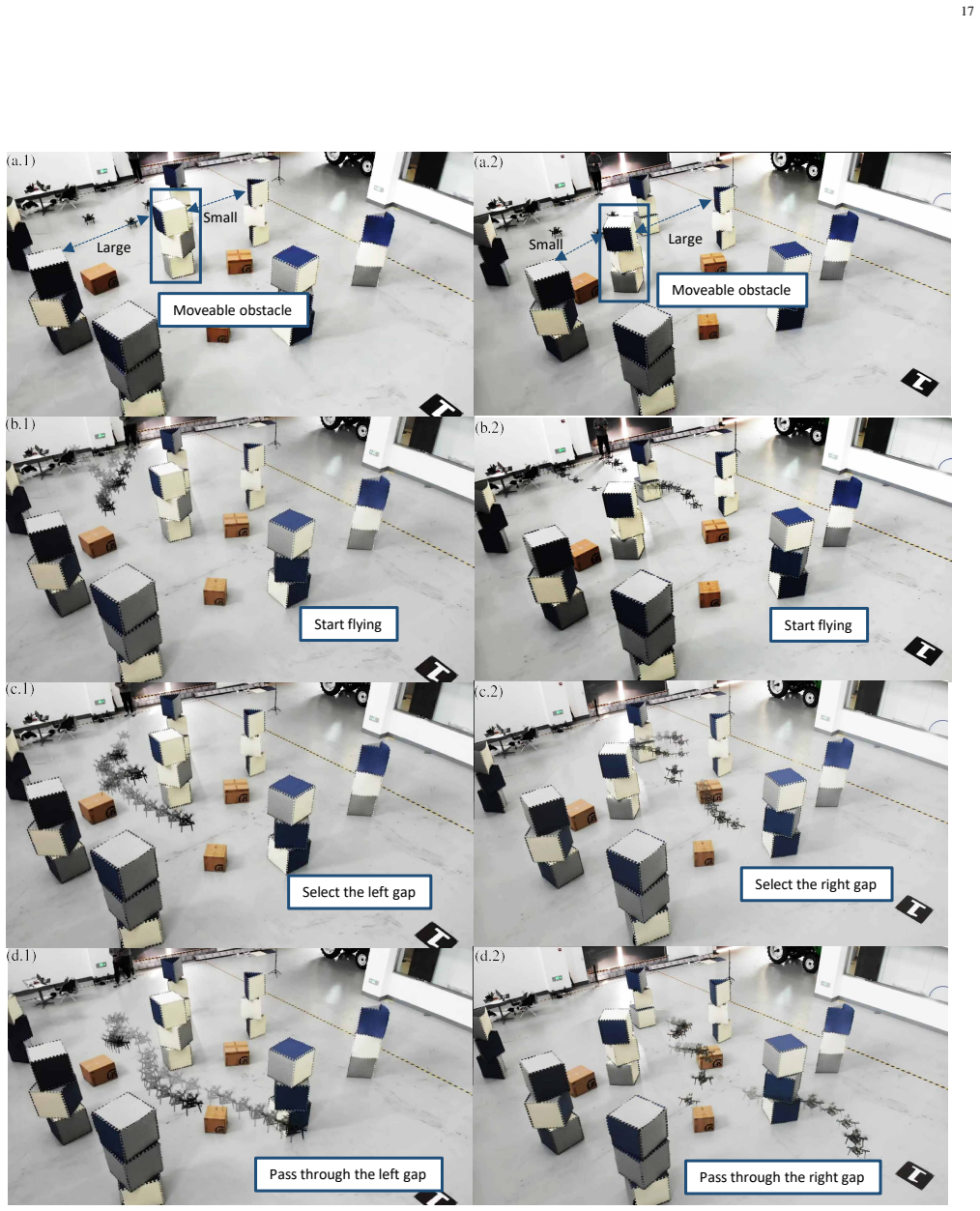
Place the swarm in a simulated corridor with a narrow gap that requires choosing one homotopic class over another; run both the full optimal virtual tube planner and the affine version and observe whether any robot collides under the approximation but not under the exact planner.
Figures








read the original abstract
Robot swarms navigating through unknown obstacle environments are an emerging research area that faces challenges. Performing tasks in such environments requires swarms to achieve autonomous localization, perception, decision-making, control, and planning. The limited computational resources of onboard platforms present significant challenges for planning and control. Reactive planners offer low computational demands and high re-planning frequencies but lack predictive capabilities, often resulting in local minima. Multi-step planners can make multi-step predictions to reduce deadlocks, but they require substantial computation, resulting in a lower replanning frequency. This paper proposes a novel homotopic trajectory planning framework for a robot swarm that combines centralized homotopic trajectory planning (optimal virtual tube planning) with distributed control, enabling low-computation, high-frequency replanning, thereby uniting the strengths of multi-step and reactive planners. Based on multi-parametric programming, homotopic optimal trajectories are approximated by affine functions. The resulting approximate solutions have computational complexity $O(n_t)$, where $n_t$ is the number of trajectory parameters. This low complexity makes centralized planning of a large number of optimal trajectories practical and, when combined with distributed control, enables rapid, low-cost replanning.} The effectiveness of the proposed method is validated through several simulations and experiments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a novel homotopic trajectory planning framework for robot swarms in unknown obstacle environments. It combines centralized optimal virtual tube planning with distributed control. Using multi-parametric programming, homotopic optimal trajectories are approximated by affine functions with O(n_t) complexity (where n_t is the number of trajectory parameters). This enables practical centralized planning for large swarms and high-frequency replanning when paired with distributed control. The approach is validated through simulations and experiments.
Significance. If the affine approximations reliably preserve homotopic classes and collision-free properties, the method could effectively bridge reactive planners (low computation, high frequency) and multi-step planners (predictive but computationally heavy) for swarm robotics. The direct derivation of O(n_t) complexity from the multi-parametric programming step is a clear technical strength, and the centralized-distributed hybrid structure offers a practical path to real-time operation on resource-limited platforms.
major comments (2)
- [Abstract] Abstract (paragraph on approximation): The central safety claim—that affine approximations obtained via multi-parametric programming preserve the homotopic properties and collision-avoidance guarantees of the original optimal virtual tube trajectories—is load-bearing for operation in unknown environments, yet the manuscript provides no explicit error bounds, no analysis of homotopy-class preservation, and no discussion of how approximation error interacts with perception noise or dynamic obstacles. Without this, the O(n_t) efficiency advantage cannot be shown to maintain the required guarantees.
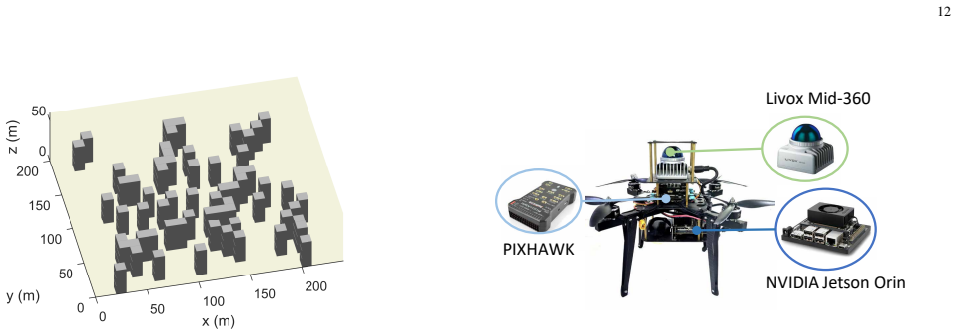
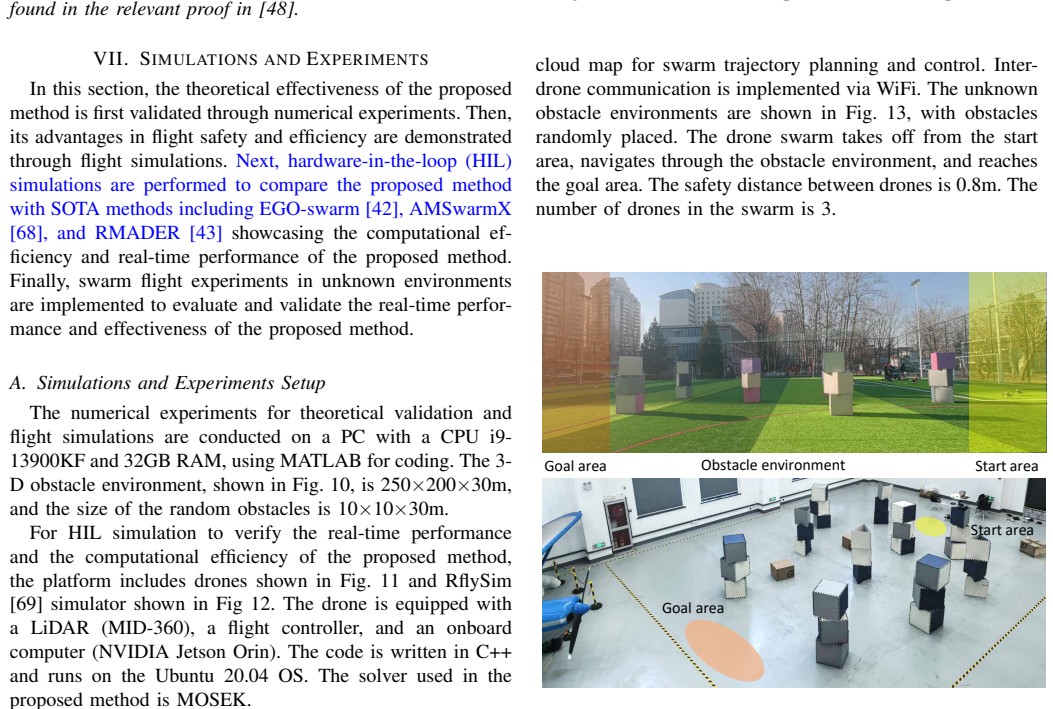
- [Validation section] Validation section (simulations and experiments): The abstract states that effectiveness is validated through simulations and experiments, but supplies no quantitative metrics, success rates, error statistics, or comparison baselines for collision avoidance, deadlock frequency, or replanning latency. This absence leaves the practical performance claims unsupported and prevents assessment of whether the distributed controller can recover from approximation-induced deviations.
minor comments (2)
- [Abstract] Notation for n_t (number of trajectory parameters) should be defined at first use and consistently applied when stating the O(n_t) complexity result.
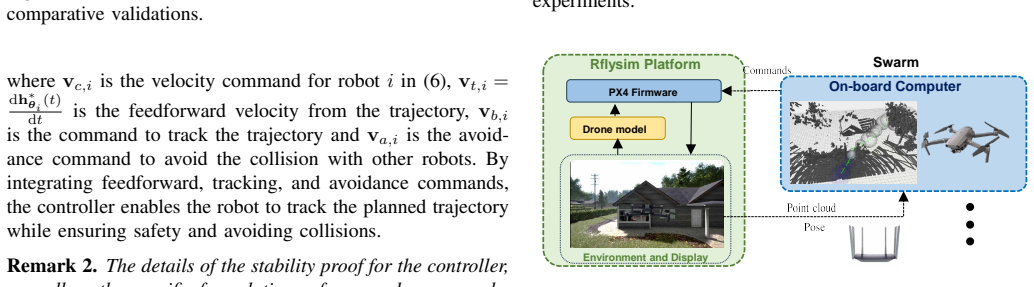
- [Method description] The description of the distributed control layer lacks a brief statement of its interface with the approximate centralized trajectories (e.g., how local corrections are computed and bounded).
Simulated Author's Rebuttal
We thank the referee for the constructive comments on the safety analysis and empirical validation. We address each point below and will incorporate revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract (paragraph on approximation): The central safety claim—that affine approximations obtained via multi-parametric programming preserve the homotopic properties and collision-avoidance guarantees of the original optimal virtual tube trajectories—is load-bearing for operation in unknown environments, yet the manuscript provides no explicit error bounds, no analysis of homotopy-class preservation, and no discussion of how approximation error interacts with perception noise or dynamic obstacles. Without this, the O(n_t) efficiency advantage cannot be shown to maintain the required guarantees.
Authors: We agree that the current manuscript lacks explicit error bounds and a dedicated robustness discussion. The multi-parametric programming step selects, for each homotopy class, the affine function that best approximates the optimal virtual-tube trajectory; because the parameterization is derived directly from the class-specific optimum, the homotopy class is preserved by construction and the resulting path remains inside the collision-free tube. Nevertheless, we did not quantify the approximation residual or analyze its interaction with sensor noise and moving obstacles. We will add a new subsection deriving L-infinity error bounds from the properties of the optimal tube and discussing margin requirements under bounded perception noise. revision: yes
-
Referee: [Validation section] Validation section (simulations and experiments): The abstract states that effectiveness is validated through simulations and experiments, but supplies no quantitative metrics, success rates, error statistics, or comparison baselines for collision avoidance, deadlock frequency, or replanning latency. This absence leaves the practical performance claims unsupported and prevents assessment of whether the distributed controller can recover from approximation-induced deviations.
Authors: The present version illustrates feasibility primarily through trajectory plots and video sequences. We acknowledge that this does not supply the quantitative evidence needed to evaluate performance claims. In the revision we will expand the validation section with tables reporting success rates over repeated trials, mean and variance of replanning latency, minimum clearance to obstacles, deadlock counts, and direct comparisons against ORCA and a sampling-based centralized planner. revision: yes
Circularity Check
No circularity: derivation applies standard multi-parametric programming without reduction to inputs
full rationale
The paper's central derivation applies multi-parametric programming to obtain affine approximations of homotopic trajectories, from which O(n_t) complexity follows directly as a known property of the method. No self-definitional steps appear, no fitted parameters are relabeled as predictions, and no load-bearing self-citations or uniqueness theorems imported from prior author work are invoked in the abstract or described framework. The combination of centralized tube planning with distributed control remains an independent architectural claim that does not reduce by construction to its own inputs or fitted values. The approach is therefore self-contained against external benchmarks for parametric approximation techniques.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Multi-parametric programming yields affine approximations that retain the homotopic properties of the original optimal trajectories.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
homotopic optimal trajectories are approximated by affine functions... computational complexity O(n_t)
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
virtual tube T = (C0, C1, f, h) ... diffeomorphism
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Asynchronous Real-time Decentral- ized Multi-robot Trajectory Planning,
B. S ¸enbas ¸lar and G. S. Sukhatme, “Asynchronous Real-time Decentral- ized Multi-robot Trajectory Planning,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 9972–9979. 17 Moveable obstacle Large Large Small Small Start flying Start flying Select the left gap Select the right gap Pass through the left ga...
work page 2022
-
[2]
A Potential Field Approach to Path Planning,
Y . K. Hwang, N. Ahujaet al., “A Potential Field Approach to Path Planning,”IEEE transactions on robotics and automation, vol. 8, no. 1, pp. 23–32, 1992
work page 1992
-
[3]
Control Barrier Functions: Theory and Applications,
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada, “Control Barrier Functions: Theory and Applications,” in 2019 18th European control conference (ECC). IEEE, 2019, pp. 3420– 3431
work page 2019
-
[4]
Decentralized multi-agent planning using model predictive control and time-aware safe corridors,
C. Toumieh and A. Lambert, “Decentralized multi-agent planning using model predictive control and time-aware safe corridors,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 11 110–11 117, 2022
work page 2022
-
[5]
MADER: Trajectory Planner in Multiagent and Dynamic Environments,
J. Tordesillas and J. P. How, “MADER: Trajectory Planner in Multiagent and Dynamic Environments,”IEEE Transactions on Robotics, vol. 38, no. 1, pp. 463–476, 2021
work page 2021
-
[6]
Optimal Virtual Tube Planning and Control for Swarm Robotics,
P. Mao, R. Fu, and Q. Quan, “Optimal Virtual Tube Planning and Control for Swarm Robotics,”The International Journal of Robotics Research, vol. 43, no. 5, pp. 602–627, 2024
work page 2024
-
[7]
P. Mao, S. Lv, and Q. Quan, “Tube-RRT*: Efficient Homotopic Path Planning for Swarm Robotics Passing-Through Large-Scale Obstacle Environments,”IEEE Robotics and Automation Letters, vol. 10, no. 3, pp. 2247–2254, 2025
work page 2025
-
[8]
J. Deng, Y . Deng, and H. Duan, “Bioinspired Homotopic Model Pre- dictive Contouring Control for Fixed-Wing Unmanned Aerial Vehicle Swarm,”IEEE Transactions on Circuits and Systems I: Regular Papers, 2025
work page 2025
-
[9]
Homotopic Path Set Planning for Robot Manipulation and Navigation,
J. Huang, Y . Tang, and K. W. S. Au, “Homotopic Path Set Planning for Robot Manipulation and Navigation,” inRobotics: Science and Systems Proceedings, 2024
work page 2024
-
[10]
Real-time Obstacle Avoidance for Manipulators and Mobile Robots,
O. Khatib, “Real-time Obstacle Avoidance for Manipulators and Mobile Robots,”The International Journal of Robotics Research, vol. 5, no. 1, pp. 90–98, 1986
work page 1986
-
[11]
E. G. Hern ´andez-Mart´ınez, E. Aranda-Bricaire, F. Alkhateeb, E. Maghayreh, and I. Doush, “Convergence and Collision Avoidance in Formation Control: A Survey of the Artificial Potential Functions Approach,”Multi-agent Systems—Modeling, Control, Programming, Simulations and Applications, pp. 103–126, 2011
work page 2011
-
[12]
Obstacle Avoidance of Mobile Robots Using Modified Artificial Potential Field Algorithm,
S. M. H. Rostami, A. K. Sangaiah, J. Wang, and X. Liu, “Obstacle Avoidance of Mobile Robots Using Modified Artificial Potential Field Algorithm,”EURASIP Journal on Wireless Communications and Net- working, vol. 2019, no. 1, pp. 1–19, 2019
work page 2019
-
[13]
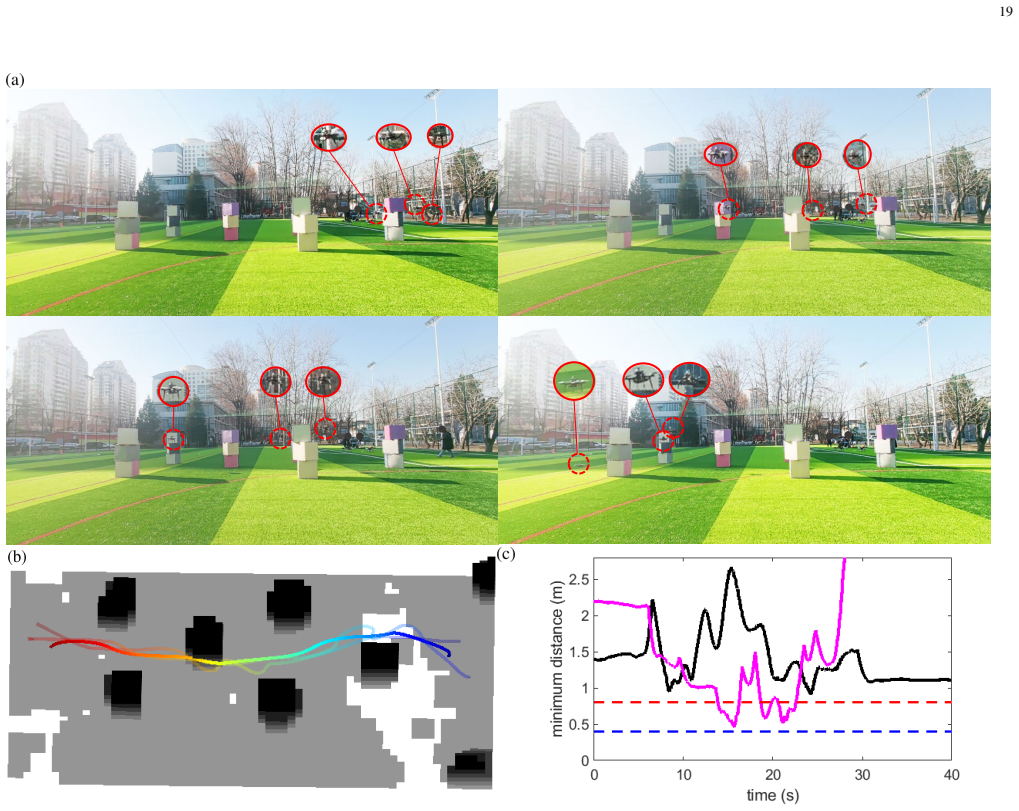
J. Antich and A. Ortiz, “Extending the Potential Fields Approach to 19 Fig. 20: The real flight experiments in scenarios 3. (a) The composite image of drone swarm flight. (b) The swarm trajectories in the point cloud maps. Trajectories at different time stamps are color-coded; the trajectory of robot 1 is plotted as a solid (opaque) line, while the trajec...
work page 2005
-
[14]
Queues and Artificial Potential Trenches for Multirobot Formations,
S. S. Ge and C.-H. Fua, “Queues and Artificial Potential Trenches for Multirobot Formations,”IEEE Transactions on Robotics, vol. 21, no. 4, pp. 646–656, 2005
work page 2005
-
[15]
A. Singletary, K. Klingebiel, J. Bourne, A. Browning, P. Tokumaru, and A. Ames, “Comparative Analysis of Control Barrier Functions and Artificial Potential Fields for Obstacle Avoidance,” in2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021, pp. 8129–8136
work page 2021
-
[16]
L. Wang, A. D. Ames, and M. Egerstedt, “Multi-oObjective Composi- tions for Collision-Free Connectivity Maintenance in Teams of Mobile Robots,” in2016 IEEE 55th Conference on Decision and Control (CDC). IEEE, 2016, pp. 2659–2664
work page 2016
-
[17]
Nonsmooth Barrier Functions with Applications to Multi-Robot Systems,
P. Glotfelter, J. Cort ´es, and M. Egerstedt, “Nonsmooth Barrier Functions with Applications to Multi-Robot Systems,”IEEE Control Systems Letters, vol. 1, no. 2, pp. 310–315, 2017
work page 2017
-
[18]
Optimized Flocking of Autonomous Drones in Confined Environments,
G. V ´as´arhelyi, C. Vir ´agh, G. Somorjai, T. Nepusz, A. E. Eiben, and T. Vicsek, “Optimized Flocking of Autonomous Drones in Confined Environments,”Science Robotics, vol. 3, no. 20, 2018
work page 2018
-
[19]
Flocks, Herds and Schools: A Distributed Behavioral Model,
C. W. Reynolds, “Flocks, Herds and Schools: A Distributed Behavioral Model,” inProceedings of the 14th annual conference on Computer graphics and interactive techniques, 1987, pp. 25–34
work page 1987
-
[20]
Flocking for Multi-Agent Dynamic Systems: Algo- rithms and Theory,
R. Olfati-Saber, “Flocking for Multi-Agent Dynamic Systems: Algo- rithms and Theory,”IEEE Transactions on Automatic Control, vol. 51, no. 3, pp. 401–420, 2006
work page 2006
-
[21]
An Optimal Control Approach to Flocking,
L. E. Beaver, C. Kroninger, and A. A. Malikopoulos, “An Optimal Control Approach to Flocking,” in2020 American Control Conference (ACC). IEEE, 2020, pp. 683–688
work page 2020
-
[22]
Hierarchical Weighting Vicsek Model for Flocking Navigation of Drones,
X. Liu, X. Xiang, Y . Chang, C. Yan, H. Zhou, and D. Tang, “Hierarchical Weighting Vicsek Model for Flocking Navigation of Drones,”Drones, vol. 5, no. 3, p. 74, 2021
work page 2021
-
[23]
The Dynamic Window Approach to Collision Avoidance,
D. Fox, W. Burgard, and S. Thrun, “The Dynamic Window Approach to Collision Avoidance,”IEEE robotics & automation magazine, vol. 4, no. 1, pp. 23–33, 2002
work page 2002
-
[24]
High-Speed Navigation using the Global Dynamic Window Approach,
O. Brock and O. Khatib, “High-Speed Navigation using the Global Dynamic Window Approach,” inProceedings 1999 ieee international conference on robotics and automation, vol. 1. IEEE, 1999, pp. 341– 346
work page 1999
-
[25]
A Convergent Dynamic Window Approach to Obstacle Avoidance,
P. Ogren and N. E. Leonard, “A Convergent Dynamic Window Approach to Obstacle Avoidance,”IEEE Transactions on Robotics, vol. 21, no. 2, pp. 188–195, 2005
work page 2005
-
[26]
Coverage Control for Mobile Sensing Networks,
J. Cortes, S. Martinez, T. Karatas, and F. Bullo, “Coverage Control for Mobile Sensing Networks,”IEEE Transactions on robotics and Automation, vol. 20, no. 2, pp. 243–255, 2004
work page 2004
-
[27]
SwarmCVT: Centroidal V oronoi Tessellation-based Path Planning for Very-Large- Scale Robotics,
J. Gao, J. Lee, Y . Zhou, Y . Hu, C. Liu, and P. Zhu, “SwarmCVT: Centroidal V oronoi Tessellation-based Path Planning for Very-Large- Scale Robotics,” in2025 American Control Conference (ACC). IEEE, 20 2025, pp. 422–429
work page 2025
-
[28]
S. Kemna, J. G. Rogers, C. Nieto-Granda, S. Young, and G. S. Sukhatme, “Multi-Robot Coordination through Dynamic V oronoi Partitioning for Informative Adaptive Sampling in Communication-Constrained Envi- ronments,” in2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2017, pp. 2124–2130
work page 2017
-
[29]
Fast, On- Line Collision Avoidance for Dynamic Vehicles using Buffered V oronoi Cells,
D. Zhou, Z. Wang, S. Bandyopadhyay, and M. Schwager, “Fast, On- Line Collision Avoidance for Dynamic Vehicles using Buffered V oronoi Cells,”IEEE Robotics and Automation Letters, vol. 2, no. 2, pp. 1047– 1054, 2017
work page 2017
-
[30]
G. Han, W. Lai, H. Wang, and S. Zhu, “Hybrid-Algorithm-based Full Coverage Search Approach with Multiple AUVs to Unknown Envi- ronments in Internet of Underwater Things,”IEEE Internet of Things Journal, vol. 11, no. 6, pp. 11 058–11 072, 2023
work page 2023
-
[31]
Multi-Robot Collaborative Hunting in Cluttered Environments with Obstacle-Avoiding V oronoi Cells,
M. Zhou, Z. Wang, J. Wang, and Z. Cao, “Multi-Robot Collaborative Hunting in Cluttered Environments with Obstacle-Avoiding V oronoi Cells,”IEEE/CAA Journal of Automatica Sinica, vol. 11, no. 7, pp. 1643–1655, 2024
work page 2024
-
[32]
Motion Planning in Dynamic Environments using Velocity Obstacles,
P. Fiorini and Z. Shiller, “Motion Planning in Dynamic Environments using Velocity Obstacles,”The international journal of robotics research, vol. 17, no. 7, pp. 760–772, 1998
work page 1998
-
[33]
Reciprocal Velocity Obsta- cles for Real-Time Multi-Agent Navigation,
J. Van den Berg, M. Lin, and D. Manocha, “Reciprocal Velocity Obsta- cles for Real-Time Multi-Agent Navigation,” in2008 IEEE international conference on robotics and automation. Ieee, 2008, pp. 1928–1935
work page 2008
-
[34]
Reciprocal N-Body Collision Avoidance,
J. Van Den Berg, S. J. Guy, M. Lin, and D. Manocha, “Reciprocal N-Body Collision Avoidance,” inRobotics Research: The 14th Interna- tional Symposium ISRR. Springer, 2011, pp. 3–19
work page 2011
-
[35]
A Survey of Multi-Agent Formation Control,
K.-K. Oh, M.-C. Park, and H.-S. Ahn, “A Survey of Multi-Agent Formation Control,”Automatica, vol. 53, pp. 424–440, 2015
work page 2015
-
[36]
Bearing Rigidity and Almost Global Bearing- Only Formation Stabilization,
S. Zhao and D. Zelazo, “Bearing Rigidity and Almost Global Bearing- Only Formation Stabilization,”IEEE Transactions on Automatic Control, vol. 61, no. 5, pp. 1255–1268, 2015
work page 2015
-
[37]
Translational and Scaling Formation Maneuver Control via a Bearing-Based Approach,
——, “Translational and Scaling Formation Maneuver Control via a Bearing-Based Approach,”IEEE Transactions on Control of Network Systems, vol. 4, no. 3, pp. 429–438, 2015
work page 2015
-
[38]
Affine Formation Maneuver Control of Multiagent Systems,
S. Zhao, “Affine Formation Maneuver Control of Multiagent Systems,” IEEE Transactions on Automatic Control, vol. 63, no. 12, pp. 4140– 4155, 2018
work page 2018
-
[39]
Distributed Predictive Drone Swarms in Cluttered Environments,
E. Soria, F. Schiano, and D. Floreano, “Distributed Predictive Drone Swarms in Cluttered Environments,”IEEE Robotics and Automation Letters, vol. 7, no. 1, pp. 73–80, 2021
work page 2021
-
[40]
C. E. Luis, M. Vukosavljev, and A. P. Schoellig, “Online Trajectory Generation with Distributed Model Predictive Control for Multi-Robot Motion Planning,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 604–611, 2020
work page 2020
-
[41]
J. Park and H. J. Kim, “Online Trajectory Planning for Multiple Quadro- tors in Dynamic Environments Using Relative Safe Flight Corridor,” IEEE Robotics and Automation Letters, vol. 6, pp. 659–666, 2021
work page 2021
-
[42]
EGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System in Cluttered Environments,
X. Zhou, J. Zhu, H. Zhou, C. Xu, and F. Gao, “EGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System in Cluttered Environments,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 4101–4107
work page 2021
-
[43]
K. Kondo, R. Figueroa, J. Rached, J. Tordesillas, P. C. Lusk, and J. P. How, “Robust MADER: Decentralized Multiagent Trajectory Planner Robust to Communication Delay in Dynamic Environments,”IEEE Robotics and Automation Letters, 2023
work page 2023
-
[44]
(2019) Airbus skyways: the future of the pracel delivery in smart cities
Airbus. (2019) Airbus skyways: the future of the pracel delivery in smart cities. Accessed July 4, 2023. [Online]. Available:{https: //www.embention.com/projects/airbus-parcel-delivery/}
work page 2019
-
[45]
Practical Distributed Control for VTOL UA Vs to Pass a Virtual Tube,
Q. Quan, R. Fu, M. Li, D. Wei, Y . Gao, and K.-Y . Cai, “Practical Distributed Control for VTOL UA Vs to Pass a Virtual Tube,”IEEE Transactions on Intelligent Vehicles, vol. 7, no. 2, pp. 342–353, 2022
work page 2022
-
[46]
Multi-UA V Cooperative Target Encirclement within an Annular Virtual Tube,
Y . Gao, C. Bai, L. Zhang, and Q. Quan, “Multi-UA V Cooperative Target Encirclement within an Annular Virtual Tube,”Aerospace Science and Technology, vol. 128, p. 107800, 2022
work page 2022
-
[47]
H. Guo, M. Chen, Y . Shen, and M. Lungu, “Distributed Event-Triggered Collision Avoidance Formation Control for QUA Vs With Disturbances Based on Virtual Tubes,”IEEE Transactions on Industrial Electronics, vol. 72, no. 2, pp. 1892–1903, 2024
work page 1903
-
[48]
Distributed Control for a Robotic Swarm to Pass Through a Curve Virtual Tube,
Q. Quan, Y . Gao, and C. Bai, “Distributed Control for a Robotic Swarm to Pass Through a Curve Virtual Tube,”Robotics and Autonomous Systems, vol. 162, p. 104368, 2023
work page 2023
-
[49]
A Potential Field-based Model Predictive Path-planning Controller for Autonomous Road Vehicles,
Y . Rasekhipour, A. Khajepour, S.-K. Chen, and B. Litkouhi, “A Potential Field-based Model Predictive Path-planning Controller for Autonomous Road Vehicles,”IEEE Transactions on Intelligent Transportation Sys- tems, vol. 18, pp. 1255–1267, 2016
work page 2016
-
[50]
Porca: Modeling and Planning for Autonomous Driving among Many Pedestrians,
Y . Luo, P. Cai, A. Bera, D. Hsu, W. S. Lee, and D. Manocha, “Porca: Modeling and Planning for Autonomous Driving among Many Pedestrians,”IEEE Robotics and Automation Letters, vol. 3, pp. 3418– 3425, 2018
work page 2018
-
[51]
Multi-Lane UA V Traffic Management with Path and Intersection Planning,
S. R. Nagrare, L. A. Tony, A. Ratnoo, and D. Ghose, “Multi-Lane UA V Traffic Management with Path and Intersection Planning,” inAIAA Scitech 2022 Forum, 2022, p. 1505
work page 2022
-
[52]
Making Robotics Swarm Flow More Smoothly: A Regular Virtual Tube,
P. Mao and Q. Quan, “Making Robotics Swarm Flow More Smoothly: A Regular Virtual Tube,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022, pp. 4498–4504
work page 2022
-
[53]
Gradient-Based Online Regular Virtual Tube Generation for UA V Swarms in Dynamic Fire Scenarios,
K. Rao, H. Yan, R. Zhang, Z. Huang, and P. Yang, “Gradient-Based Online Regular Virtual Tube Generation for UA V Swarms in Dynamic Fire Scenarios,”IEEE Transactions on Industrial Informatics, vol. 20, no. 12, pp. 14 204–14 213, 2024
work page 2024
-
[54]
F. Gao, W. Wu, W. Gao, and S. Shen, “Flying on Point Clouds: Online Trajectory Generation and Autonomous Navigation for Quadrotors in Cluttered Environments,”Journal of Field Robotics, vol. 36, no. 4, pp. 710–733, 2019
work page 2019
-
[55]
Accurate and Efficient Approximation of Clothoids using B ´ezier Curves for Path Planning,
Y . Chen, Y . Cai, J. Zheng, and D. Thalmann, “Accurate and Efficient Approximation of Clothoids using B ´ezier Curves for Path Planning,” IEEE Transactions on Robotics, vol. 33, no. 5, pp. 1242–1247, 2017
work page 2017
-
[56]
A New Approach based on Bezier Curves to Solve Path Planning Problems for Mobile Robots,
Z. Duraklı and V . Nabiyev, “A New Approach based on Bezier Curves to Solve Path Planning Problems for Mobile Robots,”Journal of computational science, vol. 58, p. 101540, 2022
work page 2022
-
[57]
T. W. Sederberg,Computer Aided Geometric Design, 2012
work page 2012
-
[58]
A matrix formulation of the cubic bezier curve,
K. I. Joy, “A matrix formulation of the cubic bezier curve,”Visualization and Graphics Research Group, University of California, Davis, 2000
work page 2000
-
[59]
Introduction to Sensitivity and Stability Analysis in Non Linear Programming,
A. V . Fiacco, “Introduction to Sensitivity and Stability Analysis in Non Linear Programming,” 1983
work page 1983
-
[60]
E. N. Pistikopoulos, M. C. Georgiadis, and V . Dua,Multi-parametric Programming: Theory, Algorithms and Applications, 2007
work page 2007
-
[61]
The Exact Solution of Multi-Parametric Quadratically Constrained Quadratic Pro- gramming Problems,
I. Pappas, N. A. Diangelakis, and E. N. Pistikopoulos, “The Exact Solution of Multi-Parametric Quadratically Constrained Quadratic Pro- gramming Problems,”Journal of Global Optimization, vol. 79, no. 1, pp. 59–85, 2021
work page 2021
-
[62]
An algorithm for approximate mul- tiparametric convex programming,
A. Bemporad and C. Filippi, “An algorithm for approximate mul- tiparametric convex programming,”Computational Optimization and Applications, vol. 35, pp. 87–108, 2006
work page 2006
-
[63]
Faster: Fast and Safe Trajectory Planner for Navigation in Unknown Environments,
J. Tordesillas, B. T. Lopez, M. Everett, and J. P. How, “Faster: Fast and Safe Trajectory Planner for Navigation in Unknown Environments,” IEEE Transactions on Robotics, vol. 38, no. 2, pp. 922–938, 2021
work page 2021
-
[64]
Bubble Planner: Planning High-Speed Smooth Quadrotor Trajectories Using Receding Corridors,
Y . Ren, F. Zhu, W. Liu, Z. Wang, Y . Lin, F. Gao, and F. Zhang, “Bubble Planner: Planning High-Speed Smooth Quadrotor Trajectories Using Receding Corridors,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 6332–6339
work page 2022
-
[65]
Surface Approximation to Scanned Data,
L. A. Piegl and W. Tiller, “Surface Approximation to Scanned Data,” The Visual Computer, vol. 16, no. 7, pp. 386–395, 2000
work page 2000
-
[66]
7 - Geometric Models and Their Ex- ploitation in NPR,
T. Strothotte and S. Schlechtweg, “7 - Geometric Models and Their Ex- ploitation in NPR,” inNon-Photorealistic Computer Graphics, ser. The Morgan Kaufmann Series in Computer Graphics. Morgan Kaufmann, 2002, pp. 203–245
work page 2002
-
[67]
A Sequential Parametric Convex Approximation Method for Solving Bilinear Matrix Inequalities,
D. Lee and J. Hu, “A Sequential Parametric Convex Approximation Method for Solving Bilinear Matrix Inequalities,” in2016 IEEE 55th Conference on Decision and Control (CDC). IEEE, 2016, pp. 1965– 1970
work page 2016
-
[68]
V . K. Adajania, S. Zhou, A. K. Singh, and A. P. Schoellig, “Amswarmx: Safe Swarm Coordination in Complex Environments via Implicit Non- Convex Decomposition of the Obstacle-Free Space,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 14 555–14 561
work page 2024
-
[69]
X. Dai, C. Ke, Q. Quan, and K.-Y . Cai, “RFlySim: Automatic Test Platform for UA V Autopilot Systems with FPGA-based Hardware-in- the-loop Simulations,”Aerospace Science and Technology, vol. 114, p. 106727, 2021
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.