Invariant Manifolds of Discrete-time Dynamical Systems with Nonlinear Exosystems via Hybrid Physics-Informed Neural Networks
Pith reviewed 2026-05-19 08:57 UTC · model grok-4.3
The pith
A hybrid polynomial and neural network method approximates invariant manifolds of discrete-time systems with nonlinear exosystems more accurately than either approach alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
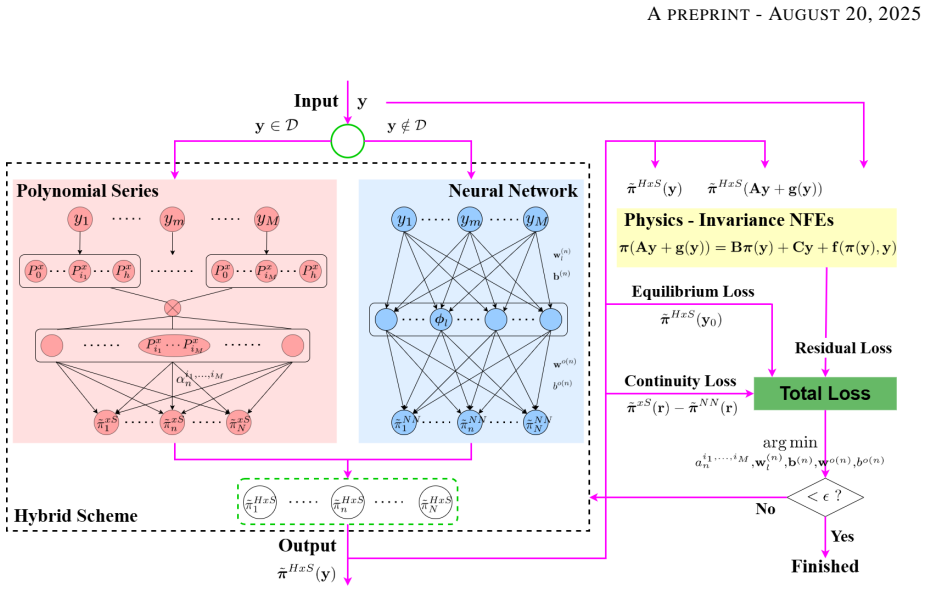
By patching local polynomial expansions near the equilibrium point with shallow neural networks farther away and enforcing consistency via a continuity penalty, the hybrid scheme solves the nonlinear functional invariance equation for discrete-time systems with nonlinear exosystems and delivers higher accuracy than either standalone representation on the tested benchmarks.
What carries the argument
Hybrid representation that combines local polynomial series with shallow neural networks joined by a continuity penalty, trained with analytically derived derivatives in the Levenberg-Marquardt algorithm.
If this is right
- The hybrid method records lower approximation error than standalone polynomials or neural networks on the enzymatic bioreactor.
- The same accuracy advantage appears on the leader-follower car-following model.
- Convergence rates, pointwise error, and training cost can be quantified for each representation on both examples.
- A separate universal approximation theorem holds for the pure neural-network case under stated assumptions on the system dynamics.
Where Pith is reading between the lines
- The patching idea could be applied to other functional equations in dynamical systems where analytic local information meets global nonlinearity.
- More reliable manifold approximations might improve reduced-order modeling of collective behaviors such as traffic flow or flocking.
- Systematic tests on increasing manifold dimension would reveal where the low-dimensional polynomial assumption ceases to be practical.
Load-bearing premise
The approach assumes the manifolds are low- to medium-dimensional so that polynomial expansions stay tractable and that a simple continuity penalty is enough to keep the local polynomial and global neural pieces consistent at their boundary.
What would settle it
Running the same training procedure on the enzymatic bioreactor or leader-follower model and finding that the hybrid error is not smaller than the error of the best pure polynomial or pure neural-network approximation would falsify the claim of superior accuracy.
Figures




read the original abstract
We propose a hybrid physics-informed machine learning framework to approximate invariant manifolds (IMs) of discrete-time dynamical systems driven by exogenous autonomous dynamics (exosystems). Such systems appear in applications ranging from control theory to modeling collective multi-agent behavior (e.g., bird flocks, traffic dynamics) under hierarchical leadership. The IM learning problem is formulated as solving nonlinear functional equations derived from the invariance equation, expressing the manifold as a relationship between exogenous and system states. The proposed approach combines polynomial series with shallow neural networks, leveraging their complementary strengths. We focus on low- to medium-dimensional manifolds where polynomial expansions remain tractable. Near equilibrium, polynomial series provide interpretability and convergence, while farther away neural networks capture global structure through their universal approximation capability. A continuity penalty enforces consistency between both representations at their interface, and training is performed using analytically derived derivatives within the Levenberg-Marquardt scheme. Naturally, depending on the dimensionality of the input-driven system, one may also employ a purely neural network-based IM approximation, for which we also establish a universal approximation theorem based on certain assumptions on system dynamics. The framework is evaluated on two benchmark problems: an enzymatic bioreactor and a leader-follower car-following model. We analyze convergence, approximation accuracy, and computational cost, and compare standalone neural networks, polynomial expansions, and the hybrid method. Results show that the hybrid approach achieves superior accuracy compared to standalone schemes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a hybrid physics-informed framework for approximating invariant manifolds of discrete-time dynamical systems with nonlinear exosystems. It combines local polynomial series near equilibrium (for interpretability and convergence) with global shallow neural networks (for capturing structure away from equilibrium), linked by a continuity penalty in the loss. Training uses analytically derived derivatives in a Levenberg-Marquardt scheme. A universal approximation theorem is stated for the pure-NN case under assumptions on the dynamics. The method is tested on an enzymatic bioreactor and a leader-follower car-following model, with comparisons of accuracy, convergence, and cost against standalone polynomial and neural-network approaches; the hybrid is reported to achieve superior accuracy.
Significance. If the empirical claims hold and the hybrid representation satisfies the invariance equation to comparable accuracy on both sides of the interface, the work could provide a practical tool for low- to medium-dimensional manifold approximation in control and multi-agent systems. The universal approximation theorem for the pure neural-network case is a clear theoretical strength that grounds the method. The hybrid construction itself is a reasonable attempt to exploit complementary strengths of polynomials and networks, but its validity hinges on the continuity penalty actually preserving the functional equation.
major comments (2)
- [Abstract] Abstract: the central claim that the hybrid approach 'achieves superior accuracy' on the enzymatic bioreactor and leader-follower examples is stated without any quantitative error values, convergence rates, validation-split details, or tabulated residuals. This absence makes the empirical superiority assertion impossible to evaluate from the provided information.
- [Hybrid construction] Hybrid construction (method description): the continuity penalty is introduced to enforce C0 consistency at the polynomial-NN interface, yet no analysis or numerical check is supplied showing that the invariance functional equation itself holds with comparable residual on both sides of the interface (including first- and higher-order derivatives). If the penalty weight or interface radius is chosen heuristically, the combined map may fail to be invariant even when pointwise errors appear small.
minor comments (1)
- [Notation] Notation for the exosystem state, invariance equation, and interface radius should be introduced with explicit definitions early in the manuscript to aid readers outside the immediate subfield.
Simulated Author's Rebuttal
We thank the referee for the thorough review and insightful comments, which have helped us identify areas where the manuscript can be strengthened. We address each major comment below and describe the revisions we will implement.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the hybrid approach 'achieves superior accuracy' on the enzymatic bioreactor and leader-follower examples is stated without any quantitative error values, convergence rates, validation-split details, or tabulated residuals. This absence makes the empirical superiority assertion impossible to evaluate from the provided information.
Authors: We agree that the abstract would be more informative with quantitative support. In the revised manuscript we will insert concise numerical indicators of accuracy (e.g., maximum and mean invariance residuals for the hybrid, pure-polynomial, and pure-NN approximations on both benchmarks) together with a brief statement on the validation procedure. These values will be drawn directly from the tables already present in the results section, allowing readers to assess the superiority claim immediately. revision: yes
-
Referee: [Hybrid construction] Hybrid construction (method description): the continuity penalty is introduced to enforce C0 consistency at the polynomial-NN interface, yet no analysis or numerical check is supplied showing that the invariance functional equation itself holds with comparable residual on both sides of the interface (including first- and higher-order derivatives). If the penalty weight or interface radius is chosen heuristically, the combined map may fail to be invariant even when pointwise errors appear small.
Authors: We acknowledge that an explicit post-training verification of the invariance equation across the interface, including derivative consistency, is currently missing. Although the loss already penalizes the invariance residual separately on each side and the continuity term enforces C0 matching, we agree that additional numerical evidence is needed to confirm that the combined representation remains invariant. In the revision we will add a dedicated subsection that reports the invariance residuals (including first-order derivatives) evaluated on both sides of the interface for the two benchmark problems, together with the specific penalty weight and interface radius employed and a short sensitivity study with respect to these hyperparameters. revision: yes
Circularity Check
No circularity detected in hybrid PINN derivation for invariant manifolds
full rationale
The paper formulates invariant manifold approximation directly as the solution of the invariance functional equation using a hybrid local polynomial plus global shallow NN representation, with a continuity penalty term added to the loss. Training proceeds via the Levenberg-Marquardt method on analytically derived residuals, and performance is assessed through direct numerical comparisons against standalone polynomial and NN baselines on two external benchmark systems. No step equates a fitted quantity to a claimed prediction by construction, no load-bearing premise reduces to an unverified self-citation, and the stated universal approximation result is derived inside the paper from explicit dynamical assumptions rather than imported circularly. The framework therefore remains self-contained against the invariance equation and the reported benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- interface location
axioms (2)
- domain assumption Invariant manifolds exist and satisfy the invariance equation for the given discrete-time system with exosystem.
- domain assumption Shallow neural networks can approximate the manifold globally under stated assumptions on system dynamics.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the hybrid scheme approximation x = ˜πHxS (y, a, p; H1, H2, r) … minimiz[es] a composite loss function that enforces the system of NFEs in Eq. (5), including residuals for manifold invariance, equilibrium constraints and continuity constraints at ∂D
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We focus on low- to medium-dimensional manifolds where polynomial expansions remain tractable … A continuity penalty enforces consistency between both representations at their interface
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Stephen Wiggins. Introduction to Applied Nonlinear Dynamical Systems and Chaos, volume 2 of Texts in Applied Mathematics. Springer, 2003
work page 2003
-
[2]
Nonlinear oscillations, dynamical systems, and bifurcations of vector fields, volume 42
John Guckenheimer and Philip Holmes. Nonlinear oscillations, dynamical systems, and bifurcations of vector fields, volume 42. Springer Science & Business Media, 2013
work page 2013
-
[3]
Geometrical methods in the theory of ordinary differential equations, volume 250
Vladimir Igorevich Arnold. Geometrical methods in the theory of ordinary differential equations, volume 250. Springer Science & Business Media, 2012
work page 2012
-
[4]
Applications of centre manifold theory, volume 35
Jack Carr. Applications of centre manifold theory, volume 35. Springer Science & Business Media, 2012
work page 2012
-
[5]
Invariant manifolds for physical and chemical kinetics, volume
Aleksandr Nikolaevich Gorban and Ilya V Karlin. Invariant manifolds for physical and chemical kinetics, volume
-
[6]
Spectral barriers and inertial manifolds for dissipative partial differential equations
Peter Constantin, Ciprian Foias, Basil Nicolaenko, and Roger Témam. Spectral barriers and inertial manifolds for dissipative partial differential equations. Journal of Dynamics and Differential Equations, 1:45–73, 1989. 20 A PREPRINT - AUGUST 20, 2025
work page 1989
-
[7]
The utility of an invariant manifold description of the evolution of a dynamical system
Antony J Roberts. The utility of an invariant manifold description of the evolution of a dynamical system. SIAM Journal on Mathematical Analysis, 20(6):1447–1458, 1989
work page 1989
-
[8]
A centre manifold description of contaminant dispersion in channels with varying flow properties
Geoffry N Mercer and Anthony J Roberts. A centre manifold description of contaminant dispersion in channels with varying flow properties. SIAM Journal on Applied Mathematics, 50(6):1547–1565, 1990
work page 1990
-
[9]
Integral manifolds and inertial manifolds for dissipative partial differential equations, volume 70
Peter Constantin, Ciprian Foias, Basil Nicolaenko, and Roger Temam. Integral manifolds and inertial manifolds for dissipative partial differential equations, volume 70. Springer Science & Business Media, 2012
work page 2012
-
[10]
Simulating stochastic inertial manifolds by a backward-forward approach
Xingye Kan, Jinqiao Duan, Ioannis G Kevrekidis, and Anthony J Roberts. Simulating stochastic inertial manifolds by a backward-forward approach. SIAM Journal on Applied Dynamical Systems, 12(1):487–514, 2013
work page 2013
-
[11]
Panagiotis D Christofides. Nonlinear and Robust Control of PDE Systems: Methods and Applications to Transport- Reaction Processes. Systems & Control: Foundations & Applications. Birkhäuser Boston, 2001
work page 2001
-
[12]
Infinite-dimensional dynamical systems in mechanics and physics, volume 68
Roger Temam. Infinite-dimensional dynamical systems in mechanics and physics, volume 68. Springer Science & Business Media, 2012
work page 2012
-
[13]
An Introduction to Difference Equations, volume 3
Saber N Elaydi. An Introduction to Difference Equations, volume 3. Springer, 2010
work page 2010
-
[14]
Geometric singular perturbation theory for ordinary differential equations
Neil Fenichel. Geometric singular perturbation theory for ordinary differential equations. Journal of Differential Equations, 31(1):53–98, 1979
work page 1979
-
[15]
Approximate inertial manifolds for the kuramoto- sivashinsky equation: analysis and computations
Michael S Jolly, Ioannis G Kevrekidis, and Edriss S Titi. Approximate inertial manifolds for the kuramoto- sivashinsky equation: analysis and computations. Physica D: Nonlinear Phenomena, 44(1-2):38–60, 1990
work page 1990
-
[16]
Fritz Colonius and Wolfgang Kliemann. The dynamics of control. Springer Science & Business Media, 2012
work page 2012
-
[17]
The controlled center dynamics
Boumediene Hamzi, Wei Kang, and Arthur J Krener. The controlled center dynamics. Multiscale Modeling & Simulation, 3(4):838–852, 2005
work page 2005
-
[18]
On invariant manifolds of nonlinear discrete-time input-driven dynamical systems
Nikolaos Kazantzis. On invariant manifolds of nonlinear discrete-time input-driven dynamical systems. Physics Letters A, 292(1-2):107–114, 2001
work page 2001
-
[19]
Nikolaos Kazantzis, Nguyen Huynh, and Theresa A Good. A model-based characterization of the long-term asymptotic behavior of nonlinear discrete-time processes using invariance functional equations. Computers & Chemical Engineering, 29(11-12):2346–2354, 2005
work page 2005
-
[20]
Output Regulation of Uncertain Nonlinear Systems, volume 1
Christopher I Byrnes, Francesco Delli Priscoli, and Alberto Isidori. Output Regulation of Uncertain Nonlinear Systems, volume 1. Birkhauser, 1997
work page 1997
-
[21]
Immersion and invariance: A new tool for stabilization and adaptive control of nonlinear systems
Alessandro Astolfi and Romeo Ortega. Immersion and invariance: A new tool for stabilization and adaptive control of nonlinear systems. IEEE Transactions on Automatic Control, 48(4):590–606, 2003
work page 2003
-
[22]
Design of discrete-time nonlinear control systems via smooth feedback
Wei Lin and Christopher I Byrnes. Design of discrete-time nonlinear control systems via smooth feedback. IEEE Transactions on Automatic Control, 39(11):2340–2346, 1994
work page 1994
-
[23]
Nonlinear regulation for a class of discrete-time systems
B Castillo, Stefano Di Gennaro, Salvatore Monaco, and D Normand-Cyrot. Nonlinear regulation for a class of discrete-time systems. Systems & Control Letters, 20(1):57–65, 1993
work page 1993
-
[24]
Feedback linearization of transverse dynamics for periodic orbits
Andrzej Banaszuk and John Hauser. Feedback linearization of transverse dynamics for periodic orbits. Systems & Control Letters, 26(2):95–105, 1995
work page 1995
-
[25]
Invariance inducing control of nonlinear discrete-time dynamical systems
Nikolaos Kazantzis. Invariance inducing control of nonlinear discrete-time dynamical systems. Journal of Nonlinear Science, 13:579–601, 2003
work page 2003
-
[26]
Singular control-invariance pdes for nonlinear systems
Nikolaos Kazantzis and Michael A Demetriou. Singular control-invariance pdes for nonlinear systems. Multiscale Modeling & Simulation, 3(4):731–748, 2005
work page 2005
-
[27]
Discrete-time nonlinear observer design using functional equations
Nikolaos Kazantzis and Costas Kravaris. Discrete-time nonlinear observer design using functional equations. Systems & Control Letters, 42(2):81–94, 2001
work page 2001
-
[28]
Observer design for nonlinear systems, volume 479
Pauline Bernard. Observer design for nonlinear systems, volume 479. Springer, 2019
work page 2019
-
[29]
Map invariance and the state reconstruction problem for nonlinear discrete-time systems
Nikolaos Kazantzis. Map invariance and the state reconstruction problem for nonlinear discrete-time systems. European Journal of Control, 15:105–119, 2009
work page 2009
-
[30]
On the existence of a kazantzis–kravaris/luenberger observer
Vincent Andrieu and Laurent Praly. On the existence of a kazantzis–kravaris/luenberger observer. SIAM Journal on Control and Optimization, 45(2):432–456, 2006
work page 2006
-
[31]
Hector Vargas Alvarez, Gianluca Fabiani, Nikolaos Kazantzis, Ioannis G Kevrekidis, and Constantinos Siettos. Nonlinear discrete-time observers with physics-informed neural networks.Chaos, Solitons & Fractals, 186:115215, 2024
work page 2024
-
[32]
On a state space approach to nonlinear H ∞ control
Arjan J van der Schaft. On a state space approach to nonlinear H ∞ control. Systems & Control Letters, 16(1):1–8, 1991. 21 A PREPRINT - AUGUST 20, 2025
work page 1991
-
[33]
Attenuation of oscillations in galerkin systems using center-manifold techniques
Cosku Kasnakoglu and Andrea Serrani. Attenuation of oscillations in galerkin systems using center-manifold techniques. European Journal of Control, 13(5):529, 2007
work page 2007
-
[34]
Geometric singular perturbation theory
Christopher KRT Jones. Geometric singular perturbation theory. Dynamical Systems, pages 44–118, 1995
work page 1995
-
[35]
Morris W Hirsch, Charles Chapman Pugh, and Michael Shub. Invariant manifolds. Bulletin of the American Mathematical Society, 76(5):1015–1019, 1970
work page 1970
-
[36]
Nonlinear normal modes and spectral submanifolds: existence, uniqueness and use in model reduction
George Haller and Sten Ponsioen. Nonlinear normal modes and spectral submanifolds: existence, uniqueness and use in model reduction. Nonlinear Dynamics, 86:1493–1534, 2016
work page 2016
-
[37]
Understanding complex chemical kinetics with computational singular perturbation
Sau-Hai Lam and Dimitris A Goussis. Understanding complex chemical kinetics with computational singular perturbation. In Symposium (International) on Combustion, volume 22, pages 931–941. Elsevier, 1989
work page 1989
-
[38]
Xavier Cabré, Ernest Fontich, and Rafael De la Llave. The parameterization method for invariant manifolds i: manifolds associated to non-resonant subspaces. Indiana University mathematics journal, pages 283–328, 2003
work page 2003
-
[39]
A subdivision algorithm for the computation of unstable manifolds and global attractors
Michael Dellnitz and Andreas Hohmann. A subdivision algorithm for the computation of unstable manifolds and global attractors. Numerische Mathematik, 75:293–317, 1997
work page 1997
-
[40]
Simplifying chemical kinetics: intrinsic low-dimensional manifolds in composition space
Ulrich Maas and Stephen B Pope. Simplifying chemical kinetics: intrinsic low-dimensional manifolds in composition space. Combustion and Flame, 88(3-4):239–264, 1992
work page 1992
-
[41]
Projecting to a slow manifold: Singularly perturbed systems and legacy codes
C William Gear, Tasso J Kaper, Ioannis G Kevrekidis, and Antonios Zagaris. Projecting to a slow manifold: Singularly perturbed systems and legacy codes. SIAM Journal on Applied Dynamical Systems, 4(3):711–732, 2005
work page 2005
-
[42]
Model reduction for combustion chemistry
Dimitris A Goussis and Ulrich Maas. Model reduction for combustion chemistry. In Turbulent Combustion Modeling, pages 193–220. Springer, 2011
work page 2011
-
[43]
Chemical kinetic insights into the ignition dynamics of n-hexane
Efstathios-Al Tingas, Zhandong Wang, S Mani Sarathy, Hong G Im, and Dimitris A Goussis. Chemical kinetic insights into the ignition dynamics of n-hexane. Combustion and Flame, 188:28–40, 2018
work page 2018
-
[44]
The mechanism by which ch2o and h2o2 additives affect the autoignition of ch4/air mixtures
Dimitris M Manias, Efstathios Al Tingas, Christos E Frouzakis, Konstantinos Boulouchos, and Dimitris A Goussis. The mechanism by which ch2o and h2o2 additives affect the autoignition of ch4/air mixtures. Combustion and Flame, 164:111–125, 2016
work page 2016
-
[45]
Analysis of the accuracy and convergence of equation-free projection to a slow manifold
Antonios Zagaris, C William Gear, Tasso J Kaper, and Yannis G Kevrekidis. Analysis of the accuracy and convergence of equation-free projection to a slow manifold. ESAIM: Mathematical Modelling and Numerical Analysis, 43(4):757–784, 2009
work page 2009
-
[46]
Dimitris G Patsatzis, Dimitris T Maris, and Dimitris A Goussis. Asymptotic analysis of a target-mediated drug disposition model: algorithmic and traditional approaches. Bulletin of Mathematical Biology, 78:1121–1161, 2016
work page 2016
-
[47]
The parameteriza- tion method for invariant manifolds
Alex Haro, Marta Canadell, Jordi-Lluis Figueras, Alejandro Luque, and Josep-Maria Mondelo. The parameteriza- tion method for invariant manifolds. Applied Mathematical Sciences, 195, 2016
work page 2016
-
[48]
Attractor modeling and empirical nonlinear model reduction of dissipative dynamical systems
Erik Bollt. Attractor modeling and empirical nonlinear model reduction of dissipative dynamical systems. International Journal of Bifurcation and Chaos, 17(04):1199–1219, 2007
work page 2007
-
[49]
Ronald R Coifman, Stephane Lafon, Ann B Lee, Mauro Maggioni, Boaz Nadler, Frederick Warner, and Steven W Zucker. Geometric diffusions as a tool for harmonic analysis and structure definition of data: diffusion maps. Proceedings of the National Academy of Sciences, 102(21):7426–7431, 2005
work page 2005
-
[50]
Data-driven reduction for a class of multiscale fast-slow stochastic dynamical systems
Carmeline J Dsilva, Ronen Talmon, C William Gear, Ronald R Coifman, and Ioannis G Kevrekidis. Data-driven reduction for a class of multiscale fast-slow stochastic dynamical systems. SIAM Journal on Applied Dynamical Systems, 15(3):1327–1351, 2016
work page 2016
-
[51]
Non- linear dimensionality reduction then and now: Aims for dissipative pdes in the ml era
Eleni D Koronaki, Nikolaos Evangelou, Cristina P Martin-Linares, Edriss S Titi, and Ioannis G Kevrekidis. Non- linear dimensionality reduction then and now: Aims for dissipative pdes in the ml era. Journal of Computational Physics, 506:112910, 2024
work page 2024
-
[52]
Physics-informed machine learning for reduced-order modeling of nonlinear problems
Wenqian Chen, Qian Wang, Jan S Hesthaven, and Chuhua Zhang. Physics-informed machine learning for reduced-order modeling of nonlinear problems. Journal of Computational Physics, 446:110666, 2021
work page 2021
-
[53]
Equation-free/galerkin-free pod-assisted computation of incompressible flows
Sirod Sirisup, George Em Karniadakis, Dongbin Xiu, and Ioannis G Kevrekidis. Equation-free/galerkin-free pod-assisted computation of incompressible flows. Journal of Computational Physics, 207(2):568–587, 2005
work page 2005
-
[54]
Alessandro Della Pia, Dimitrios G Patsatzis, Lucia Russo, and Constantinos Siettos. Learning the latent dynamics of fluid flows from high-fidelity numerical simulations using parsimonious diffusion maps. Physics of Fluids, 36(10), 2024. 22 A PREPRINT - AUGUST 20, 2025
work page 2024
-
[55]
On matching, and even rectifying, dynamical systems through koopman operator eigenfunctions
Erik M Bollt, Qianxiao Li, Felix Dietrich, and Ioannis Kevrekidis. On matching, and even rectifying, dynamical systems through koopman operator eigenfunctions. SIAM Journal on Applied Dynamical Systems, 17(2):1925– 1960, 2018
work page 1925
-
[56]
Deep learning for universal linear embeddings of nonlinear dynamics
Bethany Lusch, J Nathan Kutz, and Steven L Brunton. Deep learning for universal linear embeddings of nonlinear dynamics. Nature Communications, 9(1):4950, 2018
work page 2018
-
[57]
Koopman operator in systems and control
Alexandre Mauroy, Y Susuki, and I Mezi ´c. Koopman operator in systems and control. Springer, 2020
work page 2020
-
[58]
Task-oriented machine learning surrogates for tipping points of agent-based models
Gianluca Fabiani, Nikolaos Evangelou, Tianqi Cui, Juan M Bello-Rivas, Cristina P Martin-Linares, Constantinos Siettos, and Ioannis G Kevrekidis. Task-oriented machine learning surrogates for tipping points of agent-based models. Nature Communications, 15(1):4117, 2024
work page 2024
-
[59]
Evangelos Galaris, Gianluca Fabiani, Ioannis Gallos, Ioannis Kevrekidis, and Constantinos Siettos. Numerical bifurcation analysis of pdes from lattice boltzmann model simulations: a parsimonious machine learning approach. Journal of Scientific Computing, 92(2):1–30, 2022
work page 2022
-
[60]
Seungjoon Lee, Mahdi Kooshkbaghi, Konstantinos Spiliotis, Constantinos I Siettos, and Ioannis G. Kevrekidis. Coarse-scale pdes from fine-scale observations via machine learning. Chaos: An Interdisciplinary Journal of Nonlinear Science, 30(1):013141, 2020
work page 2020
-
[61]
Themistoklis P Sapsis and Antoine Blanchard. Optimal criteria and their asymptotic form for data selection in data-driven reduced-order modelling with gaussian process regression. Philosophical Transactions of the Royal Society A, 380(2229):20210197, 2022
work page 2022
-
[62]
Data-assisted reduced-order modeling of extreme events in complex dynamical systems
Zhong Yi Wan, Pantelis Vlachas, Petros Koumoutsakos, and Themistoklis Sapsis. Data-assisted reduced-order modeling of extreme events in complex dynamical systems. PloS One, 13(5):e0197704, 2018
work page 2018
-
[63]
Wei Chen and Andrew L Ferguson. Molecular enhanced sampling with autoencoders: On-the-fly collective variable discovery and accelerated free energy landscape exploration. Journal of Computational Chemistry , 39(25):2079–2102, 2018
work page 2079
-
[64]
Nature Communications, 15(1):1361, 2024
Alberto Solera-Rico, Carlos Sanmiguel Vila, Miguel Gómez-López, Yuning Wang, Abdulrahman Almashjary, Scott TM Dawson, and Ricardo Vinuesa.β-variational autoencoders and transformers for reduced-order modelling of fluid flows. Nature Communications, 15(1):1361, 2024
work page 2024
-
[65]
Multiscale simulations of complex systems by learning their effective dynamics
Pantelis R Vlachas, Georgios Arampatzis, Caroline Uhler, and Petros Koumoutsakos. Multiscale simulations of complex systems by learning their effective dynamics. Nature Machine Intelligence, 4(4):359–366, 2022
work page 2022
-
[66]
Ioannis G. Kevrekidis, C. William Gear, James M. Hyman, Panagiotis G. Kevrekidis, Olof Runborg, and Constantinos Theodoropoulos. Equation-free, coarse-grained multiscale computation: Enabling microscopic simulators to perform system-level analysis. Communications in Mathematical Sciences, 1(4):715–762, 2003
work page 2003
-
[67]
Fast and slow dynamics for the computational singular perturbation method
Antonios Zagaris, Hans G Kaper, and Tasso J Kaper. Fast and slow dynamics for the computational singular perturbation method. Multiscale Modeling & Simulation, 2(4):613–638, 2004
work page 2004
-
[68]
Equation-free computation of coarse-grained center manifolds of microscopic simulators
Constantinos Siettos. Equation-free computation of coarse-grained center manifolds of microscopic simulators. Journal of Computational Dynamics, 1(2):377–389, 2014
work page 2014
-
[69]
A numerical method for the approximation of stable and unstable manifolds of microscopic simulators
Constantinos Siettos and Lucia Russo. A numerical method for the approximation of stable and unstable manifolds of microscopic simulators. Numerical Algorithms, 89(3):1335–1368, 2022
work page 2022
-
[70]
Enabling equation-free modeling via diffusion maps
Tracy Chin, Jacob Ruth, Clayton Sanford, Rebecca Santorella, Paul Carter, and Björn Sandstede. Enabling equation-free modeling via diffusion maps. Journal of Dynamics and Differential Equations, pages 1–20, 2022
work page 2022
-
[71]
Double diffusion maps and their latent harmonics for scientific computations in latent space
Nikolaos Evangelou, Felix Dietrich, Eliodoro Chiavazzo, Daniel Lehmberg, Marina Meila, and Ioannis G Kevrekidis. Double diffusion maps and their latent harmonics for scientific computations in latent space. Journal of Computational Physics, 485:112072, 2023
work page 2023
-
[72]
Data-driven control of agent-based models: An equation/variable-free machine learning approach
Dimitrios G Patsatzis, Lucia Russo, Ioannis G Kevrekidis, and Constantinos Siettos. Data-driven control of agent-based models: An equation/variable-free machine learning approach. Journal of Computational Physics, 478:111953, 2023
work page 2023
-
[73]
Artificial neural networks for solving ordinary and partial differential equations
Isaac E Lagaris, Aristidis Likas, and Dimitrios I Fotiadis. Artificial neural networks for solving ordinary and partial differential equations. IEEE Transactions on Neural Networks, 9(5):987–1000, 1998
work page 1998
-
[74]
Physics- informed machine learning
George Em Karniadakis, Ioannis G Kevrekidis, Lu Lu, Paris Perdikaris, Sifan Wang, and Liu Yang. Physics- informed machine learning. Nature Reviews Physics, 3(6):422–440, 2021
work page 2021
-
[75]
Maziar Raissi, Paris Perdikaris, and George E Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. Journal of Computational Physics, 378:686–707, 2019. 23 A PREPRINT - AUGUST 20, 2025
work page 2019
-
[76]
Data-driven discovery of coordinates and governing equations
Kathleen Champion, Bethany Lusch, J Nathan Kutz, and Steven L Brunton. Data-driven discovery of coordinates and governing equations. Proceedings of the National Academy of Sciences, 116(45):22445–22451, 2019
work page 2019
-
[77]
Slow invariant manifolds of singularly perturbed systems via physics-informed machine learning
Dimitrios Patsatzis, Gianluca Fabiani, Lucia Russo, and Constantinos Siettos. Slow invariant manifolds of singularly perturbed systems via physics-informed machine learning. SIAM Journal on Scientific Computing, 46(4):C297–C322, 2024
work page 2024
-
[78]
Slow invariant manifolds of fast-slow systems of odes with physics-informed neural networks
Dimitrios G Patsatzis, Lucia Russo, and Constantinos Siettos. Slow invariant manifolds of fast-slow systems of odes with physics-informed neural networks. SIAM Journal on Applied Dynamical Systems, 23(4):3077–3122, 2024
work page 2024
-
[79]
Siping Tang, Xinlong Feng, Wei Wu, and Hui Xu. Physics-informed neural networks combined with polynomial interpolation to solve nonlinear partial differential equations. Computers & Mathematics with Applications , 132:48–62, 2023
work page 2023
-
[80]
Spectral properties of dynamical systems, model reduction and decompositions
Igor Mezi´c. Spectral properties of dynamical systems, model reduction and decompositions. Nonlinear Dynamics, 41:309–325, 2005
work page 2005
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.