You May Use the Same Channel Knowledge Map for Environment-Aware NLoS Sensing and Communication
Pith reviewed 2026-05-19 06:04 UTC · model grok-4.3
The pith
The same channel knowledge map built for communication can be reused for non-line-of-sight sensing by converting its priors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By treating the sensing targets as virtual user equipments, the wireless communication channel priors stored in the channel knowledge map are transformed into the sensing channel priors. This allows a single map, such as the channel angle-delay map, to provide the necessary angle-delay information for sensing target localization in non-line-of-sight scenarios.
What carries the argument
The channel angle-delay map (CADM) that stores environment-specific angle and delay distributions from communication channels and converts them into equivalent priors for the sensing channel.
If this is right
- Sensing accuracy improves over classic geometry-based methods in blocked environments.
- A single map supports both communication and sensing, cutting the need for separate databases.
- The framework enables integrated sensing and communication in urban low-altitude airspace with signal blockages.
- Cramer-Rao Lower Bound analysis confirms the performance advantage of the shared priors.
Where Pith is reading between the lines
- The reuse strategy could reduce overall mapping overhead when deploying integrated sensing and communication in future networks.
- Similar prior transformations might work for other channel features if stable relationships can be established.
- Joint updates to the shared map from both communication and sensing observations could improve long-term accuracy in changing environments.
Load-bearing premise
The angle-delay distributions for communication and sensing channels are related in a stable and known way that permits accurate prior transformation.
What would settle it
Real-world measurements or simulations in an NLoS urban setting where localization error using the transformed priors from the communication map shows no improvement over geometry-based methods would disprove the claimed benefit.
Figures









read the original abstract
As one of the key usage scenarios for the sixth generation (6G) wireless networks, integrated sensing and communication (ISAC) provides an efficient framework to achieve simultaneous wireless sensing and communication. However, traditional wireless sensing techniques mainly rely on the line-of-sight (LoS) assumptions, i.e., the sensing targets are directly visible to both the sensing transmitter and receiver. This hinders ISAC systems to be applied in complex environments such as the urban low-altitude airspace, which usually suffers from signal blockage and non-line-of-sight (NLoS) multi-path propagation. To address this challenge, in this paper, we propose a novel approach to enable environment-aware NLoS ISAC by leveraging the new technique called channel knowledge map (CKM), which was originally proposed for environment-aware wireless communications. One major novelty of our proposed method is that the same CKM built for wireless communication can be directly used to enable NLoS wireless sensing, thus enjoying the benefits of ``killing two birds with one stone''. To this end, the sensing targets are treated as virtual user equipment (UE), and the wireless communication channel priors are transformed into the sensing channel priors, allowing one single CKM to serve dual purposes. We illustrate our proposed framework by a specific CKM called \emph{channel angle-delay map} (CADM). Specifically, the proposed framework utilizes CADM to derive angle-delay priors of the sensing channel by exploiting the relationship between communication and sensing angle-delay distributions, enabling sensing target localization in the challenging NLoS environment. Extensive simulation results demonstrate significant performance improvements over classic geometry-based sensing methods, which is further validated by Cram\'er-Rao Lower Bound (CRLB) analysis.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes using a single channel knowledge map (CKM), specifically the channel angle-delay map (CADM) built from communication measurements, for environment-aware NLoS integrated sensing and communication (ISAC). Sensing targets are treated as virtual UEs, allowing communication angle-delay priors to be transformed into sensing channel priors for target localization in blocked environments. Simulations show performance gains over geometry-based methods, with validation against the Cramér-Rao lower bound (CRLB).
Significance. If the prior transformation is reliable, the work enables efficient dual-use of communication CKMs for NLoS sensing, reducing overhead in 6G ISAC systems operating in complex urban or low-altitude settings where LoS assumptions fail. The reported simulation gains and CRLB analysis constitute concrete, falsifiable evidence supporting the central claim.
major comments (2)
- [Framework for CADM-based NLoS sensing prior derivation] The central transformation step (invoked when deriving angle-delay priors for the sensing channel from the CADM) assumes a stable, environment-independent mapping between communication and sensing angle-delay distributions. No explicit functional form, invariance proof, or sensitivity result with respect to target position, scatterer geometry, or blockage patterns is supplied, which is load-bearing for the claim that one CKM serves both purposes without prior mismatch.
- [Simulation results and CRLB validation] The abstract and results section report significant performance improvements over geometry-based sensing methods. However, the simulation setup lacks explicit details on NLoS channel generation rules, data exclusion criteria, and whether any parameters in the prior transformation were tuned post-hoc, undermining confidence that the gains are not artifacts of the evaluation design.
minor comments (2)
- [Introduction] The distinction between general CKM and the specific CADM instantiation is introduced late; moving a concise definition to the introduction would improve readability.
- [System model] A few sentences on how the virtual-UE treatment interacts with multi-path components in the sensing channel would clarify the model assumptions.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments on our manuscript. We address each major comment below and indicate the corresponding revisions planned for the updated version.
read point-by-point responses
-
Referee: [Framework for CADM-based NLoS sensing prior derivation] The central transformation step (invoked when deriving angle-delay priors for the sensing channel from the CADM) assumes a stable, environment-independent mapping between communication and sensing angle-delay distributions. No explicit functional form, invariance proof, or sensitivity result with respect to target position, scatterer geometry, or blockage patterns is supplied, which is load-bearing for the claim that one CKM serves both purposes without prior mismatch.
Authors: We agree that an explicit functional form and supporting analysis would improve clarity. Section III of the manuscript describes the transformation by modeling sensing targets as virtual UEs and mapping the shared angle-delay distributions from the CADM based on common scatterers. To strengthen this, we will add the explicit mathematical expression for the prior mapping, a short invariance argument under the fixed-environment assumption, and a sensitivity study with respect to target position and blockage variations in the revised manuscript. revision: yes
-
Referee: [Simulation results and CRLB validation] The abstract and results section report significant performance improvements over geometry-based sensing methods. However, the simulation setup lacks explicit details on NLoS channel generation rules, data exclusion criteria, and whether any parameters in the prior transformation were tuned post-hoc, undermining confidence that the gains are not artifacts of the evaluation design.
Authors: We acknowledge the need for greater transparency in the evaluation setup. The NLoS channels are generated via a geometry-based stochastic model with fixed blockage patterns, as outlined in Section IV. In the revision we will expand this section to specify the exact channel generation parameters, the criteria used to exclude invalid multipath components, and an explicit statement that all transformation parameters were obtained directly from the CADM without post-hoc tuning. revision: yes
Circularity Check
No circularity: framework proposes external relationship exploitation without self-referential reduction
full rationale
The paper's central step treats sensing targets as virtual UEs and transforms communication angle-delay priors into sensing priors by exploiting the relationship between the two distributions. This is presented as domain knowledge applied to the CADM rather than a quantity fitted inside the paper or defined in terms of the output. No equations reduce the claimed localization gains to a parameter estimated from the same sensing data, nor does any self-citation chain supply an unverified uniqueness result that forces the mapping. Simulations and CRLB analysis provide independent validation checks. The derivation therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A stable and exploitable relationship exists between communication and sensing angle-delay distributions that permits direct transformation of priors from the communication CKM to the sensing channel.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
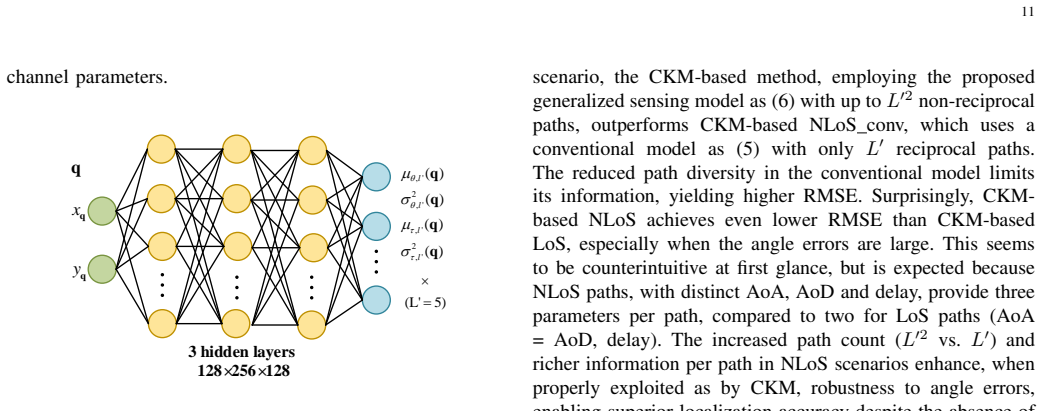
the wireless communication channel priors are transformed into the sensing channel priors... exploiting the relationship between communication and sensing angle-delay distributions (eqs. 29-31, CADM Gaussian model (35), FCNN (36))
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
CADM... learn the mapping from location to these statistical parameters... N(θl′; μθ,l′(q), σ²θ,l′(q)) ... for target sensing, we perform maximum likelihood (ML) estimation
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Channel Knowledge Map-Enabled NLoS ISAC Localization
A CKM-based framework learns scatterer priors offline from path signatures and uses online matching plus NLS to localize users in NLoS ISAC scenarios, outperforming fingerprinting in simulations.
Reference graph
Works this paper leans on
-
[1]
Towards 6G wireless communication networks: Vision, enabling technologies, and new paradigm shifts,
X. You, C.-X. Wang, J. Huang, X. Gao, Z. Zhang, M. Wang, Y . Huang, C. Zhang, Y . Jiang, J. Wanget al., “Towards 6G wireless communication networks: Vision, enabling technologies, and new paradigm shifts,” Sci. China Inf. Sci. , vol. 64, pp. 1–74, 2021
work page 2021
-
[2]
6G wireless networks: Vision, requirements, architecture, and key technologies,
Z. Zhang, Y . Xiao, Z. Ma, M. Xiao, Z. Ding, X. Lei, G. K. Karagiannidis, and P. Fan, “6G wireless networks: Vision, requirements, architecture, and key technologies,” IEEE V eh. Technol. Mag. , vol. 14, no. 3, pp. 28–41, 2019
work page 2019
-
[3]
Integrating sensing and communi- cations for ubiquitous IoT: Applications, trends, and challenges,
Y . Cui, F. Liu, X. Jing, and J. Mu, “Integrating sensing and communi- cations for ubiquitous IoT: Applications, trends, and challenges,” IEEE Netw., vol. 35, no. 5, pp. 158–167, 2021
work page 2021
-
[4]
Digital twin channel for 6G: Concepts, architectures and potential applications,
H. Wang, J. Zhang, G. Nie, L. Yu, Z. Yuan, T. Li, J. Wang, and G. Liu, “Digital twin channel for 6G: Concepts, architectures and potential applications,” IEEE Commun. Mag. , 2024
work page 2024
-
[5]
Enabling joint communication and radar sensing in mobile networks—a survey,
J. A. Zhang, M. L. Rahman, K. Wu, X. Huang, Y . J. Guo, S. Chen, and J. Yuan, “Enabling joint communication and radar sensing in mobile networks—a survey,” IEEE Commun. Surveys Tutor ., vol. 24, no. 1, pp. 306–345, 2021
work page 2021
-
[6]
An overview on integrated localization and communication towards 6G,
Z. Xiao and Y . Zeng, “An overview on integrated localization and communication towards 6G,” Sci. China Inf. Sci. , vol. 65, no. 3, p. 131301, 2022
work page 2022
-
[7]
Integrated sensing and communications for 6G: Ten key machine learning roles,
U. Demirhan and A. Alkhateeb, “Integrated sensing and communications for 6G: Ten key machine learning roles,” IEEE Commun. Mag. , vol. 61, no. 8, pp. 84–90, 2023
work page 2023
-
[8]
A tutorial on MIMO-OFDM ISAC: From far-field to near-field,
Q. Dai, Y . Zeng, H. Wang, C. You, C. Zhou, H. Cheng, X. Xu, S. Jin, A. L. Swindlehurst, Y . C. Eldar et al. , “A tutorial on MIMO-OFDM ISAC: From far-field to near-field,” arXiv preprint arXiv:2504.19091 , 2025
-
[9]
An overview of signal processing techniques for millimeter wave MIMO systems,
R. W. Heath, N. Gonz ´alez-Prelcic, S. Rangan, W. Roh, and A. M. Sayeed, “An overview of signal processing techniques for millimeter wave MIMO systems,” IEEE J. Sel. Topics Signal Process. , vol. 10, no. 3, pp. 436–453, 2016
work page 2016
-
[10]
Channel estimation and hybrid precoding for millimeter wave cellular systems,
A. Alkhateeb, O. El Ayach, G. Leus, and R. W. Heath, “Channel estimation and hybrid precoding for millimeter wave cellular systems,” IEEE J. Sel. Topics Signal Process. , vol. 8, no. 5, pp. 831–846, 2014
work page 2014
-
[11]
Waveform design and performance analysis for full-duplex integrated sensing and communication,
Z. Xiao and Y . Zeng, “Waveform design and performance analysis for full-duplex integrated sensing and communication,” IEEE J. Sel. Areas Commun., vol. 40, no. 6, pp. 1823–1837, 2022
work page 2022
-
[12]
Cram´er-rao bounds for near-field sens- ing with extremely large-scale MIMO,
H. Wang, Z. Xiao, and Y . Zeng, “Cram´er-rao bounds for near-field sens- ing with extremely large-scale MIMO,” IEEE Trans. Signal Process. , vol. 72, pp. 701–717, 2024
work page 2024
-
[13]
X. Liu, Y . Liu, F. Liu, and L. Hanzo, “Joint beamforming and re- source allocation for integrated sensing and communication in vehicular networks,” IEEE Trans. V eh. Technol. , vol. 71, no. 3, pp. 3124–3136, 2022
work page 2022
-
[14]
C. Sturm and W. Wiesbeck, “Waveform design and signal processing aspects for fusion of wireless communications and radar sensing,” Proc. IEEE, vol. 99, no. 7, pp. 1236–1259, 2011
work page 2011
-
[15]
M. A. Richards, Fundamentals of Radar Signal Processing . McGraw- Hill, 2005
work page 2005
-
[16]
Performance analysis of integrated sensing and communication networks with blockage effects,
Z. Sun, S. Yan, N. Jiang, J. Zhou, and M. Peng, “Performance analysis of integrated sensing and communication networks with blockage effects,” IEEE Trans. V eh. Technol., 2024
work page 2024
-
[17]
CSI-based fingerprinting for indoor localization: A deep learning approach,
X. Wang, L. Gao, S. Mao, and S. Pandey, “CSI-based fingerprinting for indoor localization: A deep learning approach,” IEEE Trans. V eh. Technol., vol. 66, no. 1, pp. 763–776, 2016
work page 2016
-
[18]
Z. Zhou, Z. Xiao, and Y . Zeng, “Single-BS simultaneous environment sensing and UE localization without LoS path by exploiting near-field scatterers,” IEEE Wireless Commun. Lett. , 2024
work page 2024
-
[19]
R. Liu, M. Li, H. Luo, Q. Liu, and A. L. Swindlehurst, “Integrated sensing and communication with reconfigurable intelligent surfaces: Opportunities, applications, and future directions,” IEEE Wireless Com- mun., vol. 30, no. 1, pp. 50–57, 2023
work page 2023
-
[20]
Fundamental limits of wideband localiza- tion—Part I: A general framework,
Y . Shen and M. Z. Win, “Fundamental limits of wideband localiza- tion—Part I: A general framework,” IEEE Trans. Inf. Theory , vol. 56, no. 10, pp. 4956–4980, 2010
work page 2010
-
[21]
Toward environment-aware 6G communications via channel knowledge map,
Y . Zeng and X. Xu, “Toward environment-aware 6G communications via channel knowledge map,” IEEE Wireless Commun. , vol. 28, no. 3, pp. 84–91, 2021
work page 2021
-
[22]
A tutorial on environment-aware communications via channel knowledge map for 6G,
Y . Zeng, J. Chen, J. Xu, D. Wu, X. Xu, S. Jin, X. Gao, D. Gesbert, S. Cui, and R. Zhang, “A tutorial on environment-aware communications via channel knowledge map for 6G,” IEEE Commun. Surveys Tuts. , vol. 26, no. 3, pp. 1478–1519, 2024
work page 2024
-
[23]
D. Wu, Z. Wu, Y . Qiu, S. Fu, and Y . Zeng, “CKMImageNet: A comprehensive dataset to enable channel knowledge map construction via computer vision,” in Proc. 2024 IEEE/CIC Int. Conf. Commun. China (ICCC Workshops) . IEEE, 2024, pp. 114–119
work page 2024
-
[24]
Z. Wu, D. Wu, S. Fu, Y . Qiu, and Y . Zeng, “CKMImageNet: A dataset for AI-based channel knowledge map towards environment- aware communication and sensing,” arXiv preprint arXiv:2504.09849 , 2025
-
[25]
How much data is needed for channel knowledge map construction?
X. Xu and Y . Zeng, “How much data is needed for channel knowledge map construction?” IEEE Trans. Wireless Commun. , vol. 23, no. 10, pp. 13 011–13 021, 2024
work page 2024
-
[26]
An I2I inpainting approach for efficient channel knowledge map construction,
Z. Jin, L. You, J. Wang, X.-G. Xia, and X. Gao, “An I2I inpainting approach for efficient channel knowledge map construction,” IEEE Trans. Wireless Commun. , 2024
work page 2024
-
[27]
Generative CKM construction using partially observed data with diffusion model,
S. Fu, Z. Wu, D. Wu, and Y . Zeng, “Generative CKM construction using partially observed data with diffusion model,” arXiv preprint arXiv:2412.14812, 2024
-
[28]
CKMDiff: A generative diffusion model for CKM construction via inverse problems with learned priors,
S. Fu, Y . Zeng, Z. Wu, D. Wu, S. Jin, C.-X. Wang, and X. Gao, “CKMDiff: A generative diffusion model for CKM construction via inverse problems with learned priors,” arXiv preprint arXiv:2504.17323, 2025
-
[29]
Z. Li, Q. Gao, W. Zhang, X. Bao, J. Xia, and Z. Zheng, “Millimeter wave wireless channel knowledge map construction based on path matching and environment partitioning,” Wireless Commun. and Mobile Comput. , vol. 2023, no. 1, p. 6671048, 2023
work page 2023
-
[30]
Channel knowledge maps con- struction based on point cloud environment information,
Y . Wang, Y . Li, G. Chen, and C. Huang, “Channel knowledge maps con- struction based on point cloud environment information,” in VTC2024- Fall. IEEE, 2024, pp. 1–5
work page 2024
-
[31]
W. Yue, J. Li, C. Li, N. Cheng, and J. Wu, “A channel knowledge map- aided personalized resource allocation strategy in air-ground integrated mobility,” IEEE Trans. Intell. Transp. Syst. , 2024
work page 2024
-
[32]
W. Jiang, X. Yuan, B. Teng, H. Wang, and J. Qian, “Interference- cancellation-based channel knowledge map construction and its appli- cations to channel estimation,” IEEE Trans. Wireless Commun. , 2025
work page 2025
-
[33]
Environment-aware hybrid beamforming by leveraging channel knowledge map,
D. Wu, Y . Zeng, S. Jin, and R. Zhang, “Environment-aware hybrid beamforming by leveraging channel knowledge map,” IEEE Trans. Wireless Commun., vol. 22, no. 10, pp. 6453–6467, 2023
work page 2023
-
[34]
Z. Dai, D. Wu, Z. Dong, and Y . Zeng, “Prototyping and experimental results for environment-aware millimeter wave beam alignment via channel knowledge map,” IEEE Trans. V eh. Technol. , vol. 73, no. 11, pp. 16 805–16 816, 2024
work page 2024
-
[35]
E. M. Taghavi, R. Hashemi, N. Rajatheva, and M. Latva-Aho, “Environment-aware joint active/passive beamforming for RIS-aided communications leveraging channel knowledge map,” IEEE Commun. Lett., vol. 27, no. 7, pp. 1824–1828, 2023
work page 2023
-
[36]
Channel knowledge map aided channel prediction with measurements- based evaluation,
X. Wang, Y . Shi, T. Wang, Y . Huang, Z. Hu, L. Chen, and Z. Jiang, “Channel knowledge map aided channel prediction with measurements- based evaluation,” IEEE Trans. Commun. , 2024
work page 2024
-
[37]
D. Wu, Y . Qiu, Y . Zeng, and F. Wen, “Environment-aware channel estimation via integrating channel knowledge map and dynamic sensing information,” IEEE Wireless Commun. Lett. , vol. 13, no. 12, pp. 3608– 3612, 2024
work page 2024
-
[38]
Prototyping and experimental results for ISAC-based channel knowledge map,
C. Zhang, Z. Zhou, X. Xu, Y . Zeng, Z. Zhang, and S. Jin, “Prototyping and experimental results for ISAC-based channel knowledge map,”IEEE Trans. V eh. Technol., 2025
work page 2025
-
[39]
Channel knowledge map- enhanced clutter suppression for integrated sensing and communication,
Z. Xu, Z. Zhou, D. Wu, and Y . Zeng, “Channel knowledge map- enhanced clutter suppression for integrated sensing and communication,” in Proc. 2024 IEEE/CIC Int. Conf. Commun. China (ICCC Workshops) . IEEE, 2024, pp. 90–95
work page 2024
-
[40]
Multiple emitter location and signal parameter estimation,
R. Schmidt, “Multiple emitter location and signal parameter estimation,” IEEE Trans. Antennas Propag. , vol. 34, no. 3, pp. 276–280, 1986
work page 1986
-
[41]
ESPRIT-estimation of signal parameters via rotational invariance techniques,
R. Roy and T. Kailath, “ESPRIT-estimation of signal parameters via rotational invariance techniques,” IEEE Trans. Acoust., Speech, Signal Process., vol. 37, no. 7, pp. 984–995, 1989
work page 1989
-
[42]
NLOS identification and mitigation for localization based on UWB experimen- tal data,
S. Marano, W. M. Gifford, H. Wymeersch, and M. Z. Win, “NLOS identification and mitigation for localization based on UWB experimen- tal data,” IEEE J. Sel. Areas Commun. , vol. 28, no. 7, pp. 1026–1035, 2010
work page 2010
-
[43]
S. M. Kay, Fundamentals of statistical signal processing: estimation theory. Prentice-Hall, Inc., 1993
work page 1993
-
[44]
H. Lu and Y . Zeng, “Delay alignment modulation: Manipulating channel delay spread for efficient single-and multi-carrier communication,”IEEE Trans. Wireless Commun. , vol. 71, no. 11, pp. 6316–6331, 2023
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.