Certified Coil Geometry Learning for Short-Range Magnetic Actuation and Spacecraft Docking Application
Pith reviewed 2026-05-19 05:33 UTC · model grok-4.3
The pith
A learning-based framework approximates exact magnetic coil interactions with certified error bounds for spacecraft docking.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes that a learning-based approximation faithfully reproduces the exact magnetic-field interaction model while dramatically reducing computational cost, directly derives a coefficient matrix mapping inter-satellite current vectors to forces and torques, and provides a certified error bound derived from the number of training samples, while the learned model accommodates interactions between coils of different sizes through appropriate geometric transformations without retraining.
What carries the argument
The coefficient matrix derived from training on exact field data, which directly maps inter-satellite current vectors to forces and torques while carrying a certified error bound based on training sample count.
If this is right
- Real-time magnetic control commands become practical during close-proximity satellite operations.
- The certified bound enables reliable prediction of actuation forces and torques in docking maneuvers.
- Geometric transformations permit reuse of the trained model across different coil sizes and configurations.
- Both simulation and hardware tests confirm stable performance where dipole approximations produce instability.
Where Pith is reading between the lines
- The same certified learning approach could be applied to short-range magnetic systems in biomedical robotics or energy transfer devices.
- The error bound might support formal safety verification when embedding the model in autonomous docking controllers.
- Experiments with varying training densities could quantify how sample count trades off against bound tightness in practice.
- Integration with existing formation-control laws could test whether the reduced computation time improves overall system responsiveness.
Load-bearing premise
The learned coefficient matrix and geometric transformations preserve accuracy for the specific coil geometries and proximity distances encountered in the docking scenario without introducing unaccounted modeling errors beyond the certified bound.
What would settle it
A physical docking experiment that measures actual force and torque values across varying distances and currents, then checks whether the observed errors remain inside the certified bound computed from the training sample size.
Figures




read the original abstract
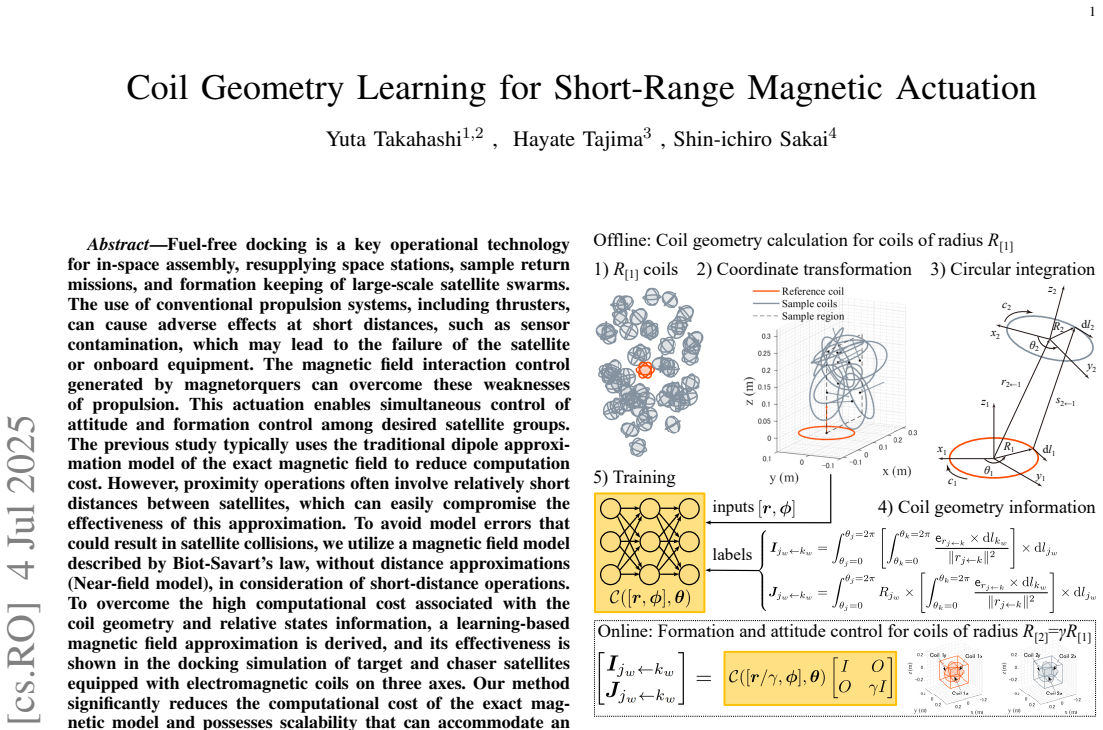
This paper presents a learning-based framework for approximating an exact magnetic-field interaction model, supported by both numerical and experimental validation. High-fidelity magnetic-field interaction modeling is essential for achieving exceptional accuracy and responsiveness across a wide range of fields, including transportation, energy systems, medicine, biomedical robotics, and aerospace robotics. In aerospace engineering, magnetic actuation has been investigated as a fuel-free solution for multi-satellite attitude and formation control. Although the exact magnetic field can be computed from the Biot-Savart law, the associated computational cost is prohibitive, and prior studies have therefore relied on dipole approximations to improve efficiency. However, these approximations lose accuracy during proximity operations, leading to unstable behavior and even collisions. To address this limitation, we develop a learning-based approximation framework that faithfully reproduces the exact field while dramatically reducing computational cost. This framework directly derives a coefficient matrix that maps inter-satellite current vectors to the resulting forces and torques, enabling efficient computation of control current commands. The proposed method additionally provides a certified error bound, derived from the number of training samples, ensuring reliable prediction accuracy. The learned model can also accommodate interactions between coils of different sizes through appropriate geometric transformations, without retraining. To verify the effectiveness of the proposed framework under challenging conditions, a spacecraft docking scenario is examined through both numerical simulations and experimental validation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a learning-based framework for approximating exact magnetic-field interactions between coils for short-range actuation, with application to spacecraft docking. It derives a coefficient matrix from training data that maps inter-satellite current vectors to forces and torques, claims a certified error bound depending only on the number of training samples, supports different coil sizes via geometric transformations without retraining, and reports numerical plus experimental validation in a docking scenario.
Significance. If the error bound is rigorously established and remains informative across the relevant 6DOF pose space, the work would provide a computationally efficient yet certified alternative to full Biot-Savart evaluation or dipole approximations, enabling more reliable magnetic control during proximity operations in aerospace robotics.
major comments (2)
- [Certification / Methods] The central claim of a 'certified error bound derived from the number of training samples' (Abstract) lacks any derivation, proof sketch, or statement of the required assumptions (e.g., Lipschitz constant, covering number, or hypothesis-class complexity). This is load-bearing because, for a continuous 6-dimensional relative-pose domain, a sample-count-only bound does not automatically guarantee uniform accuracy at the force/torque precision needed for stable docking; the bound could exceed control tolerances near-field.
- [Numerical and Experimental Validation] No quantitative error metrics (maximum force/torque deviation, RMS error, or comparison against the certified bound) appear in the numerical or experimental validation sections, despite the abstract stating that both validations were performed. Without these numbers it is impossible to verify whether the learned coefficient matrix plus geometric transformations actually stay inside the claimed bound for docking-relevant distances and orientations.
minor comments (2)
- [Abstract] The abstract and introduction would benefit from an explicit statement of the inter-satellite distance range and orientation limits considered in the docking scenario.
- [Method] Notation for the coefficient matrix and the precise form of the geometric transformations for unequal coil sizes should be defined once and used consistently.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. The comments identify important areas where additional rigor and quantitative detail will strengthen the manuscript. We address each major comment below and will make the indicated revisions.
read point-by-point responses
-
Referee: [Certification / Methods] The central claim of a 'certified error bound derived from the number of training samples' (Abstract) lacks any derivation, proof sketch, or statement of the required assumptions (e.g., Lipschitz constant, covering number, or hypothesis-class complexity). This is load-bearing because, for a continuous 6-dimensional relative-pose domain, a sample-count-only bound does not automatically guarantee uniform accuracy at the force/torque precision needed for stable docking; the bound could exceed control tolerances near-field.
Authors: We agree that the derivation of the certified error bound must be made explicit. The bound follows from a uniform convergence argument for Lipschitz-continuous functions over a compact 6D domain, using an epsilon-net argument whose cardinality depends on the sample count. The original submission states the bound but does not include the proof sketch or list the assumptions. In the revision we will add a dedicated subsection (or appendix) that states the Lipschitz assumption (with a data-driven bound derived from the Biot-Savart law), recalls the covering-number result, and shows how the sample count controls the supremum error. We will also evaluate the numerical value of the bound for the sample sizes used in the paper and compare it to typical docking control tolerances. revision: yes
-
Referee: [Numerical and Experimental Validation] No quantitative error metrics (maximum force/torque deviation, RMS error, or comparison against the certified bound) appear in the numerical or experimental validation sections, despite the abstract stating that both validations were performed. Without these numbers it is impossible to verify whether the learned coefficient matrix plus geometric transformations actually stay inside the claimed bound for docking-relevant distances and orientations.
Authors: We acknowledge that the validation sections present only qualitative docking trajectories and do not report explicit error statistics or bound comparisons. This omission prevents direct verification of the bound's tightness. In the revised manuscript we will insert tables and plots that quantify maximum absolute deviation and RMS error in force and torque for both the numerical simulations and the hardware experiments. These metrics will be computed over a grid of docking-relevant distances and orientations and will be shown alongside the theoretical certified bound to confirm that observed errors remain within the predicted envelope. revision: yes
Circularity Check
No significant circularity; derivation uses external Biot-Savart data generation plus standard learning bounds
full rationale
The paper generates training data from the exact Biot-Savart law (external physical model), fits a coefficient matrix via supervised learning on that data, and states a certified error bound derived from sample count. This follows the standard supervised approximation + generalization-bound template. No quoted step reduces the central claim (matrix derivation or bound) to a tautological fit or self-citation chain by construction. The bound is presented as a function of sample count rather than a post-hoc fitted quantity, and the geometric transformations for different coil sizes are described as post-training adaptations without retraining. The derivation chain therefore remains independent of its own outputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- number of training samples
axioms (1)
- domain assumption Magnetic field interactions between coils can be represented by a coefficient matrix mapping current vectors to forces and torques
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We approximate these coil-specific geometry terms using a multi-layer perceptron (MLP)... certified error bound, derived from the number of training samples
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Corollary 1... geometric transformations... without retraining
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Ultra-soft electromagnetic docking with applications to in-orbit assem- bly,
R. C. Foust, E. S. Lupu, Y . K. Nakka, S.-J. Chung, and F. Y . Hadaegh, “Ultra-soft electromagnetic docking with applications to in-orbit assem- bly,” in 69th International Astronautical Congress, Bremen, Germany , 2018, pp. 1–5
work page 2018
-
[2]
In- space structural assembly: Applications and technology,
W. K. Belvin, W. R. Doggett, J. J. Watson, J. T. Dorsey, J. E. Warren, T. C. Jones, E. E. Komendera, T. Mann, and L. M. Bowman, “In- space structural assembly: Applications and technology,” in 3rd AIAA Spacecraft Structures Conference, 2016, p. 2163
work page 2016
-
[3]
Space assembly of large structural system architectures (salssa),
J. Dorsey and J. Watson, “Space assembly of large structural system architectures (salssa),” in AIAA SPACE 2016, 2016, p. 5481
work page 2016
-
[4]
T. Inamori, P. Ji-Hyun, K. Nagai, H. Tamura, G. Xinbo, Y . Fujita, R. Ya- maguchi, T. Miyamoto, D. Ukita, T. Osakiet al., “In-orbit demonstration of propellant-less formation flight with momentum exchange of jointed multiple cubesats in the magnaro mission,” 2022
work page 2022
-
[5]
The elsa-d end- of-life debris removal mission: Preparing for launch,
C. Blackerby, A. Okamoto, S. Iizuka, Y . Kobayashi, K. Fujimoto, Y . Seto, S. Fujita, T. Iwai, N. Okada, J. Forshaw et al., “The elsa-d end- of-life debris removal mission: Preparing for launch,” in Proceedings of the International Astronautical Congress, IAC , vol. 8, 2019
work page 2019
-
[6]
Prospects of a hybrid mag- netic/electrostatic sample container retriever,
T. Shibata, T. Bennett, and H. Schaub, “Prospects of a hybrid mag- netic/electrostatic sample container retriever,” Journal of Spacecraft and Rockets, vol. 57, no. 3, pp. 434–445, 2020
work page 2020
-
[7]
Kicksat: A crowd-funded mission to demonstrate the world’s smallest spacecraft,
Z. Manchester, M. Peck, and A. Filo, “Kicksat: A crowd-funded mission to demonstrate the world’s smallest spacecraft,” inIn Proceedings of the 27th AIAA/USU Conference, Small Satellite Constellations , 2013
work page 2013
-
[8]
On development of 100-gram-class spacecraft for swarm applications,
F. Y . Hadaegh, S.-J. Chung, and H. M. Manohara, “On development of 100-gram-class spacecraft for swarm applications,” IEEE Systems Journal, vol. 10, no. 2, pp. 673–684, 2014
work page 2014
-
[9]
Satellite swarm-based antenna arrays for 6g direct-to-cell connectivity,
D. Tuzi, T. Delamotte, and A. Knopp, “Satellite swarm-based antenna arrays for 6g direct-to-cell connectivity,” IEEE Access , vol. 11, pp. 36 907–36 928, 2023
work page 2023
-
[10]
S. Morioka, T. Inagawa, N. Homma, K. Murata, H. Yamaguchi, A. Shi- rane, M. Okada, K. Yasumoto, and M. Kim, “Dense formation flying of multiple picosats for communication satellites and its technical challenges,” IEICE Technical Report; IEICE Tech. Rep. , vol. 124, no. 289, pp. 49–54, 2024
work page 2024
-
[11]
Y . Takahashi, S. Shim, and S.-i. Sakai, “Distance-based relative or- bital transition for palm-sized satellite swarm with guaranteed escape- avoidance,” in AIAA Scitech 2025 Forum , 2025, p. 2068
work page 2025
-
[12]
Fea- sibility analysis of distributed space antennas using electromagnetic formation flight,
S. Shim, Y . Takahashi, N. Usami, M. Kubota, and S.-i. Sakai, “Fea- sibility analysis of distributed space antennas using electromagnetic formation flight,” in 2025 IEEE Aerospace Conference , 2025
work page 2025
-
[13]
R. C. Foust, “Optimal guidance and control of heterogeneous swarms for in-orbit self-assembly of large space structures: Algorithms and experi- ments,” Ph.D. dissertation, University of Illinois at Urbana-Champaign, 2019. 8
work page 2019
-
[14]
A review of research on the vacuum plume,
G. Cai, L. Liu, B. He, G. Ling, H. Weng, and W. Wang, “A review of research on the vacuum plume,” Aerospace, vol. 9, no. 11, p. 706, 2022
work page 2022
-
[15]
Basics of plume impingement analysis for small chemical and cold gas thrusters,
G. Dettleff and M. Grabe, “Basics of plume impingement analysis for small chemical and cold gas thrusters,” Models and Computational Methods for Rarefied Flows , 2011
work page 2011
-
[16]
Status and future of research on plume in- duced contamination,
M. Grabe and C. E. Soares, “Status and future of research on plume in- duced contamination,” in Proceedings of the International Astronautical Congress, IAC. IAF, 2019
work page 2019
-
[17]
Research on vacuum plume and its effects,
B. He, J. Zhang, and G. Cai, “Research on vacuum plume and its effects,”Chinese Journal of Aeronautics, vol. 26, no. 1, pp. 27–36, 2013
work page 2013
-
[18]
Fehse, Automated Rendezvous and Docking of Spacecraft
W. Fehse, Automated Rendezvous and Docking of Spacecraft . Cam- bridge University Press, 2003, vol. 16
work page 2003
-
[19]
Design and on-orbit evaluation of magnetic attitude control system for the “reimei
S.-I. Sakai, Y . Fukushima, and H. Saito, “Design and on-orbit evaluation of magnetic attitude control system for the “reimei”’ microsatellite,” in 10th IEEE International Workshop on Advanced Motion Control. IEEE, 2008, pp. 584–589
work page 2008
-
[20]
A contactless micro-vibration isolator using the flux pinning effect for space telescopes,
T. Shibata and S.-I. Sakai, “A contactless micro-vibration isolator using the flux pinning effect for space telescopes,” Journal of Spacecraft and Rockets, vol. 59, no. 2, pp. 651–659, 2022
work page 2022
-
[21]
Y . Takahashi, H. Sakamoto, and S.-i. Sakai, “Kinematics control of electromagnetic formation flight using angular-momentum conservation constraint,” Journal of Guidance, Control, and Dynamics, vol. 45, no. 2, pp. 280–295, 2022
work page 2022
-
[22]
The relative position control in formation flying satellites using super-conducting magnets,
R. Kaneda, S.-I. Sakai, T. Hashimoto, and H. Saito, “The relative position control in formation flying satellites using super-conducting magnets,” Japan Society of Aeronautical Space Sciences , vol. 56, no. 652, pp. 203–210, 2008
work page 2008
-
[23]
Y . Takahashi, H. Sakamoto, and S.-i. Sakai, “Simultaneous control of relative position and absolute attitude for electromagnetic spacecraft swarm,” in AIAA Scitech 2021 Forum , 2021, p. 1104
work page 2021
-
[24]
Optimal guidance and control for electromagnetic formation flying,
A. Ayyad, “Optimal guidance and control for electromagnetic formation flying,” Master’s thesis, The University of Tokyo, 2019
work page 2019
-
[25]
Y . Takahashi, H. Sakamoto, and S.-i. Sakai, “Control law of electromagnetic formation flight utilizing conservation of angular momentum: Time-varying control without using additional attitude actuator,” in The 30th Workshop on JAXA Astrodynamics and Flight Mechanics . Japan Aerospace Exploration Agency / Institute of Space and Astronautical Science, 2020...
work page 2020
-
[26]
Electromagnetic formation flight dipole solution planning,
S. A. Schweighart, “Electromagnetic formation flight dipole solution planning,” Ph.D. dissertation, Massachusetts Institute of Technology, 2005
work page 2005
-
[27]
Electromagnetic formation flight for leo satellites,
S.-i. Sakai, R. Kaneda, K. Maeda, T. Saitoh, H. Saito, and T. Hashimoto, “Electromagnetic formation flight for leo satellites,” in 3rd International Symposium on Formation Flying, Missions and Technologies , 2008
work page 2008
-
[28]
Dynamics and control of electromagnetic satellite for- mations,
U. Ahsun, “Dynamics and control of electromagnetic satellite for- mations,” Ph.D. dissertation, Massachusetts Institute of Technology, Aeronautics and Astronautics Department, 2007
work page 2007
-
[29]
Demonstra- tion of electromagnetic formation flight and wireless power transfer,
A. K. Porter, D. J. Alinger, R. J. Sedwick, J. Merk, R. A. Opperman, A. Buck, G. Eslinger, P. Fisher, D. W. Miller, and E. Bou, “Demonstra- tion of electromagnetic formation flight and wireless power transfer,” Journal of Spacecraft and Rockets, vol. 51, no. 6, pp. 1914–1923, 2014
work page 1914
-
[30]
Micro-electromagnetic formation flight of satellite sys- tems,
A. Sakaguchi, “Micro-electromagnetic formation flight of satellite sys- tems,” Ph.D. dissertation, Massachusetts Institute of Technology, 2005
work page 2005
-
[31]
Study on short range formation flight and docking control using ac magnetic field,
H. Tajima, Y . Takahashi, T. Shibata, H. Sakamoto, and S.-i. Sakai, “Study on short range formation flight and docking control using ac magnetic field,” in 74th International Astronautical Congress, Baku, Azerbaijan, 2-6 October 2023
work page 2023
-
[32]
Neural power-optimal magnetorquer solution for multi- agent formation and attitude control,
Y . Takahashi, “Neural power-optimal magnetorquer solution for multi- agent formation and attitude control,” 2024
work page 2024
-
[33]
S. Manabe, “Coefficient diagram method,” IFAC Proceedings Volumes, vol. 31, no. 21, pp. 211–222, 1998
work page 1998
-
[34]
Decentralized electromag- netic formation flight using alternating magnetic field forces,
Z. Abbasi, J. B. Hoagg, and T. M. Seigler, “Decentralized electromag- netic formation flight using alternating magnetic field forces,” IEEE Transactions on Control Systems Technology , vol. 30, no. 6, pp. 2480– 2489, 2022
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.