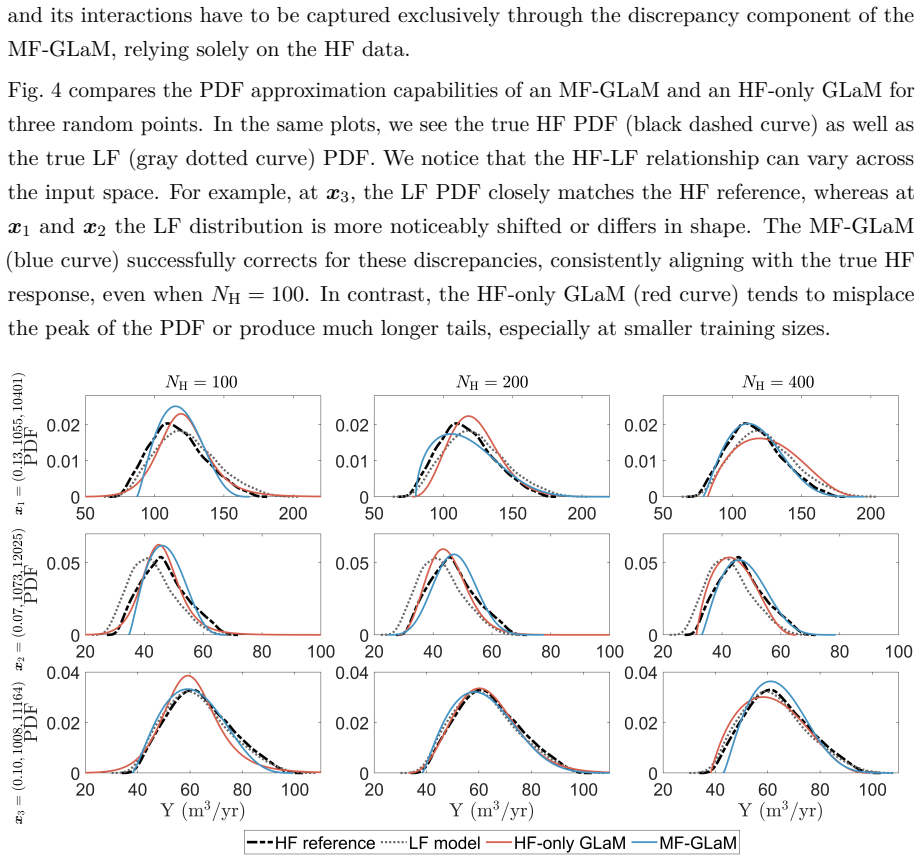
MF-GLaM: A multifidelity stochastic emulator using generalized lambda models
Pith reviewed 2026-05-19 04:57 UTC · model grok-4.3
The pith
Multifidelity generalized lambda models fuse low-fidelity data to emulate stochastic simulator distributions more efficiently.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
MF-GLaMs represent the conditional response distribution at each input with a four-parameter generalized lambda distribution and combine information across fidelity levels to emulate high-fidelity stochastic simulators, resulting in either better accuracy for the same computational cost or comparable accuracy at much lower cost.
What carries the argument
The multifidelity generalized lambda model (MF-GLaM), which extends single-fidelity GLaM by fusing correlated data from lower-fidelity stochastic simulators to estimate the conditional distribution.
If this is right
- MF-GLaMs improve accuracy over single-fidelity GLaMs when using the same number of high-fidelity evaluations.
- MF-GLaMs achieve similar accuracy to single-fidelity GLaMs while using significantly fewer high-fidelity evaluations.
- The method applies successfully to synthetic test cases of increasing complexity.
- The method works on a realistic application involving earthquake simulation.
Where Pith is reading between the lines
- Similar multifidelity fusion strategies could be applied to other flexible distribution families for stochastic emulation.
- This could lead to more efficient methods for global sensitivity analysis or optimization involving stochastic simulators.
- Testing on simulators with varying degrees of correlation between fidelity levels would help identify when the approach is most beneficial.
Load-bearing premise
Lower-fidelity simulators provide useful correlated information that can be fused with high-fidelity data to better estimate the conditional distribution.
What would settle it
A new stochastic simulator example where applying the MF-GLaM yields no accuracy improvement or cost savings compared to using only the high-fidelity GLaM.
Figures







read the original abstract
Stochastic simulators exhibit intrinsic stochasticity due to unobservable, uncontrollable, or unmodeled input variables, resulting in random outputs even at fixed input conditions. Such simulators are common across various scientific disciplines; however, emulating their entire conditional probability distribution is challenging, as it is a task traditional deterministic surrogate modeling techniques are not designed for. Additionally, accurately characterizing the response distribution can require prohibitively large datasets, especially for computationally expensive high-fidelity (HF) simulators. When lower-fidelity (LF) stochastic simulators are available, they can enhance limited HF information within a multifidelity surrogate modeling (MFSM) framework. While MFSM techniques are well-established for deterministic settings, constructing multifidelity emulators to predict the full conditional response distribution of stochastic simulators remains a challenge. In this paper, we propose multifidelity generalized lambda models (MF-GLaMs) to efficiently emulate the conditional response distribution of HF stochastic simulators by exploiting data from LF stochastic simulators. Our approach builds upon the generalized lambda model (GLaM), which represents the conditional distribution at each input by a flexible, four-parameter generalized lambda distribution. MF-GLaMs are non-intrusive, requiring no access to the internal stochasticity of the simulators nor multiple replications of the same input values. We demonstrate the efficacy of MF-GLaM through synthetic examples of increasing complexity and a realistic earthquake application. Results show that MF-GLaMs can achieve improved accuracy at the same cost as single-fidelity GLaMs, or comparable performance at significantly reduced cost.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes multifidelity generalized lambda models (MF-GLaMs) to emulate the full conditional response distributions of high-fidelity stochastic simulators by fusing data from lower-fidelity simulators. It extends the single-fidelity GLaM, which models each conditional distribution via a four-parameter generalized lambda distribution, through a parametric correction (likely on the lambda parameters) fitted to mixed-fidelity data. The method is non-intrusive and is evaluated on synthetic examples of increasing complexity plus a realistic earthquake engineering case, with the central claim that MF-GLaMs achieve improved accuracy at fixed cost or comparable accuracy at significantly reduced cost relative to single-fidelity GLaMs.
Significance. If the performance claims hold under broader conditions, this work would advance non-intrusive distributional emulation for stochastic simulators, a setting where traditional deterministic surrogates fall short and HF data are expensive. The flexibility of the generalized lambda family and the multifidelity fusion strategy address a genuine gap between existing MFSM techniques (mostly deterministic) and stochastic applications in uncertainty quantification. Credit is due for the non-intrusive requirement and the demonstration on a realistic earthquake example; however, the significance is tempered by the need for clearer evidence that the parametric correction reliably transfers distributional information without bias when LF-HF correlation is imperfect or non-stationary.
major comments (3)
- [§4] §4 (synthetic examples): the LF simulators are constructed via direct transformation of the HF outputs, which by design guarantees strong distributional correlation. This setup does not stress-test the central claim under realistic discrepancies that may be non-stationary or affect higher moments differently; the performance gain therefore rests on an optimistic correlation structure that may not generalize.
- [§3] §3 (MF-GLaM construction) and §4.2 (earthquake application): the exact functional form of the parametric correction on the four GLaM lambda parameters and the joint fitting procedure to mixed-fidelity data are not specified in sufficient detail. Without this, it is impossible to verify whether the multifidelity construction successfully transfers information or risks introducing bias when the LF-HF discrepancy is complex.
- [§4.2] §4.2 (earthquake example): no quantitative measure of LF-HF distributional correlation (e.g., parameter-wise correlation coefficients or moment discrepancies) is reported. Because the central accuracy/cost claim depends on the correction model capturing this correlation, the absence of such diagnostics leaves the empirical support for the weakest assumption unexamined.
minor comments (2)
- [Abstract and §1] The abstract and §1 would benefit from explicit statements of the validation metrics used (e.g., Wasserstein distance, quantile errors, or log-likelihood) and any cross-validation or data-exclusion rules applied to the reported results.
- [§3] Notation for the correction model and the mixed-fidelity likelihood should be introduced with a clear table or diagram early in §3 to aid readability.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed feedback on our manuscript. We have carefully reviewed each major comment and provide point-by-point responses below. We indicate where we agree and will revise the manuscript accordingly to improve clarity and strengthen the empirical support.
read point-by-point responses
-
Referee: §4 (synthetic examples): the LF simulators are constructed via direct transformation of the HF outputs, which by design guarantees strong distributional correlation. This setup does not stress-test the central claim under realistic discrepancies that may be non-stationary or affect higher moments differently; the performance gain therefore rests on an optimistic correlation structure that may not generalize.
Authors: We acknowledge that the synthetic LF simulators are generated through direct transformations of the HF outputs, which creates a controlled and relatively strong correlation structure. This choice was made to systematically vary the complexity of the distributional mapping while isolating the contribution of the multifidelity correction. Nevertheless, we agree that this does not fully probe non-stationary discrepancies or differential effects on higher moments that may arise in practice. In the revised manuscript we will expand the discussion in §4 to explicitly note this limitation of the synthetic test suite and to highlight that the earthquake engineering example relies on physically motivated LF and HF models rather than direct output transformation, thereby providing a more realistic (if still imperfect) correlation structure. revision: partial
-
Referee: §3 (MF-GLaM construction) and §4.2 (earthquake application): the exact functional form of the parametric correction on the four GLaM lambda parameters and the joint fitting procedure to mixed-fidelity data are not specified in sufficient detail. Without this, it is impossible to verify whether the multifidelity construction successfully transfers information or risks introducing bias when the LF-HF discrepancy is complex.
Authors: We apologize for the insufficient detail provided on the parametric correction and the joint estimation procedure. In the revised manuscript we will add an explicit description of the functional form used to relate the four lambda parameters across fidelities (including the precise parametric model and any link functions) together with a step-by-step account of the mixed-fidelity maximum-likelihood fitting algorithm, including initialization, optimization routine, and any regularization employed. These additions will appear in an expanded §3 and will be cross-referenced in §4.2 to allow full reproducibility and assessment of potential bias. revision: yes
-
Referee: §4.2 (earthquake example): no quantitative measure of LF-HF distributional correlation (e.g., parameter-wise correlation coefficients or moment discrepancies) is reported. Because the central accuracy/cost claim depends on the correction model capturing this correlation, the absence of such diagnostics leaves the empirical support for the weakest assumption unexamined.
Authors: We agree that quantitative diagnostics of the LF-HF correlation would strengthen the validation of the central modeling assumption. In the revised §4.2 we will include a new table or figure reporting (i) Pearson or Spearman correlation coefficients between the estimated GLaM lambda parameters obtained from LF and HF data at representative input locations, and (ii) relative discrepancies in the first four moments of the conditional distributions. These diagnostics will be accompanied by a brief interpretation of how the observed correlation levels support the accuracy gains reported for MF-GLaM. revision: yes
Circularity Check
MF-GLaM extends GLaM via parametric correction without reducing performance claims to self-definition or fitted inputs
full rationale
The derivation introduces a multifidelity correction (additive or multiplicative) on the four GLaM lambda parameters, jointly fitted to mixed LF/HF data. Central claims of accuracy improvement at fixed cost or comparable accuracy at lower cost are supported by empirical results on synthetic cases and an earthquake application rather than by algebraic identity or by renaming the fitted correction as a 'prediction'. No load-bearing self-citation, uniqueness theorem, or ansatz smuggling is required; the correlation-transfer assumption is stated explicitly and tested numerically. This yields a minor self-citation score but leaves the core multifidelity construction independently verifiable against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The generalized lambda distribution is sufficiently flexible to represent the conditional response distribution at each input.
Reference graph
Works this paper leans on
-
[1]
Ankenman, B., B. L. Nelson, and J. Staum (2010). Stochastic K riging for simulation metamodeling. Operations Research\/ 58\/ (2), 371--382
work page 2010
-
[2]
Arnold, D. V. and N. Hansen (2012). A (1+1)-CMA-ES for constrained optimisation . In T. Soule and J. H. Moore (Eds.), Proceedings of the Genetic and Evolutionary Computation Conference 2012 ( GECCO 2012) , pp.\ 297--304
work page 2012
- [3]
-
[4]
Bae, H., A. J. Beachy, D. L. Clark, J. D. Deaton, and E. E. Forster (2020). Multifidelity modeling using nondeterministic localized Galerkin approach. AIAA Journal\/ 58\/ (5), 2246--2260
work page 2020
-
[5]
Bae, H., D. L. Clark, and E. E. Forster (2019). Nondeterministic Kriging for engineering design exploration. AIAA Journal\/ 57\/ (4), 1659--1670
work page 2019
-
[6]
Blatman, G. and B. Sudret (2011). Adaptive sparse polynomial chaos expansion based on L east A ngle R egression. Journal of Computational Physics\/ 230\/ (6), 2345--2367
work page 2011
-
[7]
Bouc, R. (1967). Forced vibrations of mechanical systems with hysteresis. In Proceedings of the 4th Conference on Nonlinear Oscillations , Prague, Czechoslovakia, pp.\ 315--321
work page 1967
-
[8]
Broccardo, M. and M. Dabaghi (2017). A spectral-based stochastic ground motion model with a non-parametric time-modulating function. In 12th International Conference on Structural Safety and Reliability; Vienna , pp.\ 1--10
work page 2017
-
[9]
Browne, T., B. Iooss, L. Le Gratiet , J. Lonchampt, and E. R\'emy (2016). Stochastic simulators based optimization by G aussian process metamodels -- A pplication to maintenance investments planning issues. Quality and Reliability Engineering International\/ 32\/ (6), 2067--2080
work page 2016
-
[10]
Callens, R. R., M. G. Faes, and D. Moens (2022). Multilevel quasi- Monte Carlo for interval analysis. International Journal for Uncertainty Quantification\/ 12\/ (4), 1--19
work page 2022
- [11]
-
[12]
Conti, P., M. Guo, A. Manzoni, and J. S. Hesthaven (2023). Multi-fidelity surrogate modeling using long short-term memory networks. Computer Methods in Applied Mechanics and Engineering\/ 404 , 115811
work page 2023
- [13]
-
[14]
Drucker, H., C. J. C. Burges, L. Kaufman, A. Smola, and V. Vapnik (1996). Support vector regression machines. In M. Mozer, M. Jordan, and T. Petsche (Eds.), Advances in Neural Information Processing Systems , Volume 9. MIT Press
work page 1996
-
[15]
Dubourg, V. and B. Sudret (2014). Meta-model-based importance sampling for reliability sensitivity analysis. Structural Safety\/ 49 , 27--36
work page 2014
-
[16]
Forrester, A. I., A. S \' o bester, and A. J. Keane (2007). Multi-fidelity optimization via surrogate modelling. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences\/ 463\/ (2088), 3251--3269
work page 2007
-
[17]
Ghanem, R. G. and P. D. Spanos (1991). Stochastic Finite Elements: A Spectral Approach . New York: Springer-Verlag. Reprinted by Dover Publications, Mineola, NY, 2003
work page 1991
-
[18]
Giannoukou, K., S. Marelli, and B. Sudret (2025). Uncertainty-aware multifidelity surrogate modeling with noisy data. ASCE-ASME Journal of Risk and Uncertainty in Engineering Systems, Part A: Civil Engineering\/ 11\/ (3), 04025037
work page 2025
-
[19]
Giles, M. B. (2008). Multilevel Monte Carlo path simulation. Operations Research\/ 56\/ (3), 607--617
work page 2008
-
[20]
Gorodetsky, A. A., G. Geraci, M. S. Eldred, and J. D. Jakeman (2020). A generalized approximate control variate framework for multifidelity uncertainty quantification. Journal of Computational Physics\/ 408 , 109257
work page 2020
-
[21]
Hall, P., J. Racine, and Q. Li (2004). Cross-validation and the estimation of conditional probability densities. Journal of the American Statistical Association\/ 99\/ (468), 1015--1026
work page 2004
-
[22]
Hebbal, A., L. Brevault, M. Balesdent, E. Talbi, and N. Melab (2021). Multi-fidelity modeling with different input domain definitions using deep Gaussian processes. Structural and Multidisciplinary Optimization\/ 63\/ (5), 2267--2288
work page 2021
-
[23]
Kennedy, M. C. and A. O'Hagan (2000). Predicting the output from a complex computer code when fast approximations are available. Biometrika\/ 87\/ (1), 1--13
work page 2000
-
[24]
Konomi, B. A., E. L. Kang, A. Almomani, and J. Hobbs (2023). Bayesian latent variable co- K riging model in remote sensing for quality flagged observations. Journal of Agricultural, Biological and Environmental Statistics\/ 28\/ (3), 423--441
work page 2023
-
[25]
Le Gratiet, L. and J. Garnier (2014). Recursive co- K riging model for design of computer experiments with multiple levels of fidelity. International Journal for Uncertainty Quantification\/ 4\/ (5), 365--386
work page 2014
-
[26]
L\"uthen, N., S. Marelli, and B. Sudret (2021). Sparse polynomial chaos expansions: Literature survey and benchmark. SIAM/ASA Journal on Uncertainty Quantification\/ 9\/ (2), 593--649
work page 2021
-
[27]
L\"uthen, N., S. Marelli, and B. Sudret (2023). A spectral surrogate model for stochastic simulators computed from trajectory samples. Computer Methods in Applied Mechanics and Engineering\/ 406\/ (115875), 1--29
work page 2023
-
[28]
L\"uthen, N., X. Zhu, S. Marelli, and B. Sudret (2024). UQLab user manual -- Generalized Lambda Model . Technical report, Chair of Risk, Safety and Uncertainty Quantification, ETH Zurich,Switzerland
work page 2024
-
[29]
M. Freimer, G. Kollia, G. S. M. and C. T. Lin (1988). A study of the generalized Tukey lambda family. Communications in Statistics - Theory and Methods\/ 17\/ (10), 3547--3567
work page 1988
-
[30]
Marelli, S. and B. Sudret (2014). UQLab : A framework for uncertainty quantification in Matlab . In Vulnerability, Uncertainty, and Risk . American Society of Civil Engineers
work page 2014
-
[31]
Mazzoni, S., F. McKenna, M. H. Scott, G. L. Fenves, et al. (2006). OpenSees command language manual. Pacific earthquake engineering research (PEER) center\/ 264\/ (1), 137--158
work page 2006
-
[32]
McKay, M. D., R. J. Beckman, and W. J. Conover (1979). A comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics\/ 21\/ (2), 239--245
work page 1979
-
[33]
Meng, X., H. Babaee, and G. E. Karniadakis (2021). Multi-fidelity B ayesian neural networks: A lgorithms and applications. Journal of Computational Physics\/ 438 , 110361
work page 2021
-
[34]
Moutoussamy, V., S. Nanty, and B. Pauwels (2015). Emulators for stochastic simulation codes. ESAIM: Proceedings and Surveys\/ 48 , 116--155
work page 2015
-
[35]
Mueller, J. N., K. Sargsyan, C. J. Daniels, and H. N. Najm (2025). Polynomial chaos surrogate construction for random fields with parametric uncertainty. SIAM/ASA Journal on Uncertainty Quantification\/ 13\/ (1), 1--29
work page 2025
-
[36]
Neath, A. A. and J. E. Cavanaugh (2012). The Bayesian information criterion: background, derivation, and applications. WIREs Computational Statistics\/ 4\/ (2), 199--203
work page 2012
-
[37]
Ng, L. W.-T. and M. S. Eldred (2012). Multifidelity uncertainty quantification using non-intrusive polynomial chaos and stochastic collocation. In 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, Hawaii , pp.\ 1852
work page 2012
-
[38]
Palar, P. S., T. Tsuchiya, and G. T. Parks (2016). Multi-fidelity non-intrusive polynomial chaos based on regression. Computer Methods in Applied Mechanics and Engineering\/ 305 , 579--606
work page 2016
-
[39]
Peherstorfer, B., T. Cui, Y. Marzouk, and K. Willcox (2016). Multifidelity importance sampling. Computer Methods in Applied Mechanics and Engineering\/ 300 , 490--509
work page 2016
-
[40]
Perdikaris, P., D. Venturi, J. O. Royset, and G. E. Karniadakis (2015). Multi-fidelity modelling via recursive co- Kriging and Gaussian–Markov random fields. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences\/ 471\/ (2179), 20150018
work page 2015
-
[41]
Rasmussen, C. and C. Williams (2006). Gaussian processes for machine learning . Adaptive Computation and Machine Learning. Cambridge, Massachusetts: MIT Press
work page 2006
-
[42]
Reuter, B. W., G. Geraci, and T. Wildey (2024). Analysis of the challenges in developing sample-based multifidelity estimators for nondeterministic models. International Journal for Uncertainty Quantification\/ 14\/ (5), 1--30
work page 2024
-
[43]
Rezaeian, S. and A. Der Kiureghian (2010). Simulation of synthetic ground motions for specified earthquake and site characteristics. Earthquake Engineering and Structural Dynamics\/ 39\/ (10), 1155--1180
work page 2010
-
[44]
Schwartz, G. (1978). Estimating the dimension of a model. Annals of Statistics\/ 6\/ (2), 461--464
work page 1978
-
[45]
Schär, S., S. Marelli, and B. Sudret (2025). Surrogate modeling with functional nonlinear autoregressive models (F-NARX) . Reliability Engineering & System Safety\/ 264 , 111276
work page 2025
-
[46]
Steihaug, T. (1983). The conjugate gradient method and trust regions in large scale optimization. SIAM Journal on Numerical Analysis\/ 20\/ (3), 626--637
work page 1983
-
[47]
Stroh, R., J. Bect, S. Demeyer, N. Fischer, D. Marquis, and E. Vazquez (2021). Sequential design of multi-fidelity computer experiments: Maximizing the rate of stepwise uncertainty reduction. Technometrics\/ 64\/ (2), 199--209
work page 2021
-
[48]
Tao, B., L. Yan, Y. Zhao, M. Wang, and L. Ouyang (2025). Bayesian analysis of multi-fidelity modeling in the stochastic simulations. Computers & Industrial Engineering\/ 199 , 110749
work page 2025
-
[49]
Torre, E., S. Marelli, P. Embrechts, and B. Sudret (2019). Data-driven polynomial chaos expansion for machine learning regression. Journal of Computational Physics\/ 388 , 601--623
work page 2019
-
[50]
Villani, C. (2009). Optimal transport: old and new , Volume 338. Springer
work page 2009
-
[51]
Wen, Y. K. (1976). Method for random vibration of hysteretic systems. Journal of the Engineering Mechanics Division\/ 102\/ (2), 249--263
work page 1976
-
[52]
Xiong, S., P. Z. G. Qian, and C. F. J. Wu (2013). Sequential design and analysis of high-accuracy and low-accuracy computer codes. Technometrics\/ 55\/ (1), 37--46
work page 2013
-
[53]
Xiu, D. and G. E. Karniadakis (2002). The Wiener-Askey polynomial chaos for stochastic differential equations . SIAM Journal on Scientific Computing\/ 24\/ (2), 619--644
work page 2002
-
[54]
Yang, Y. and P. Perdikaris (2019). Conditional deep surrogate models for stochastic, high-dimensional, and multi-fidelity systems. Computational Mechanics\/ 64\/ (2), 417--434
work page 2019
-
[55]
Zhang, C., L. Liu, H. Wang, X. Song, and D. Tao (2022). SCGAN : stacking-based generative adversarial networks for multi-fidelity surrogate modeling. Structural and Multidisciplinary Optimization\/ 65\/ (6), 1--16
work page 2022
-
[56]
Zhang, Y., N. H. Kim, C. Park, and R. T. Haftka (2018). M ultifidelity surrogate based on single linear regression. AIAA Journal\/ 56\/ (12), 4944--4952
work page 2018
-
[57]
Zhu, X., M. Broccardo, and B. Sudret (2023). Seismic fragility analysis using stochastic polynomial chaos expansions. Probabilistic Engineering Mechanics\/ 72\/ (103413), 1--13
work page 2023
-
[58]
Zhu, X. and B. Sudret (2020). Replication-based emulation of the response distribution of stochastic simulators using generalized lambda distributions. International Journal for Uncertainty Quantification\/ 10\/ (3), 249--275
work page 2020
-
[59]
Zhu, X. and B. Sudret (2021). Emulation of stochastic simulators using generalized lambda models. SIAM/ASA Journal on Uncertainty Quantification\/ 9\/ (4), 1345--1380
work page 2021
-
[60]
Zhu, X. and B. Sudret (2023). Stochastic polynomial chaos expansions to emulate stochastic simulators. International Journal for Uncertainty Quantification\/ 13\/ (2), 31--52
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.