Dark-EvGS: Event Camera as an Eye for Radiance Field in the Dark
Pith reviewed 2026-05-19 05:07 UTC · model grok-4.3
The pith
Event cameras with 3D Gaussian Splatting reconstruct bright multi-view frames from low-light data using triplet supervision and color matching.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
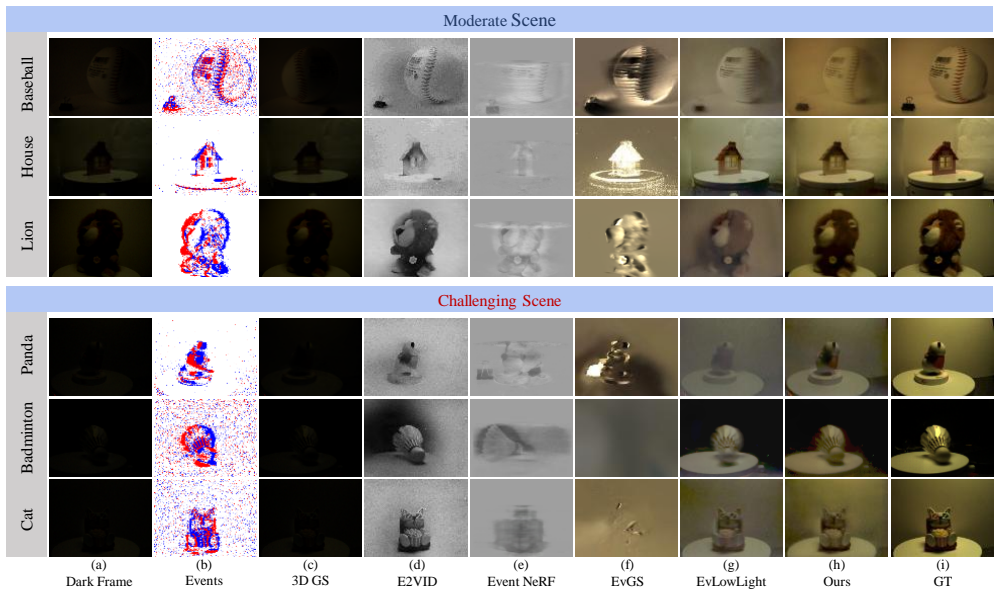
Dark-EvGS is the first event-assisted 3D GS framework that enables the reconstruction of bright frames from arbitrary viewpoints along the camera trajectory. It tackles noisy low-light events and color inconsistencies by introducing triplet-level supervision that jointly captures holistic knowledge, granular details, and sharp rendering, together with a color tone matching block that enforces consistency in the rendered outputs. A new real-captured dataset supports the experiments, which show the approach outperforms existing methods for radiance field reconstruction under challenging low-light conditions.
What carries the argument
Triplet-level supervision together with a color tone matching block inside an event-assisted 3D Gaussian Splatting pipeline that converts noisy low-light event streams into consistent bright radiance fields.
If this is right
- Bright frames can be synthesized from arbitrary viewpoints along the camera trajectory even when all input frames are captured in low light.
- Color tone remains consistent across rendered views without requiring separate post-processing steps.
- Radiance fields can be built directly from real event data collected in challenging low-light environments.
- The resulting reconstructions outperform prior event-assisted or frame-only methods on the introduced dataset.
Where Pith is reading between the lines
- The same supervision pattern could be tested on dynamic scenes to support event-guided video synthesis in the dark.
- The released dataset offers a natural benchmark for comparing future low-light radiance field techniques.
- Pairing the method with other high-dynamic-range sensors might further reduce reliance on controlled lighting setups.
Load-bearing premise
Noisy low-light event data, when processed with triplet supervision and color tone matching, supplies enough independent signal to yield high-quality color-consistent radiance fields without new artifacts.
What would settle it
Rendered frames from a held-out low-light sequence show visible color shifts or artifacts once the color tone matching block is disabled.
Figures




read the original abstract
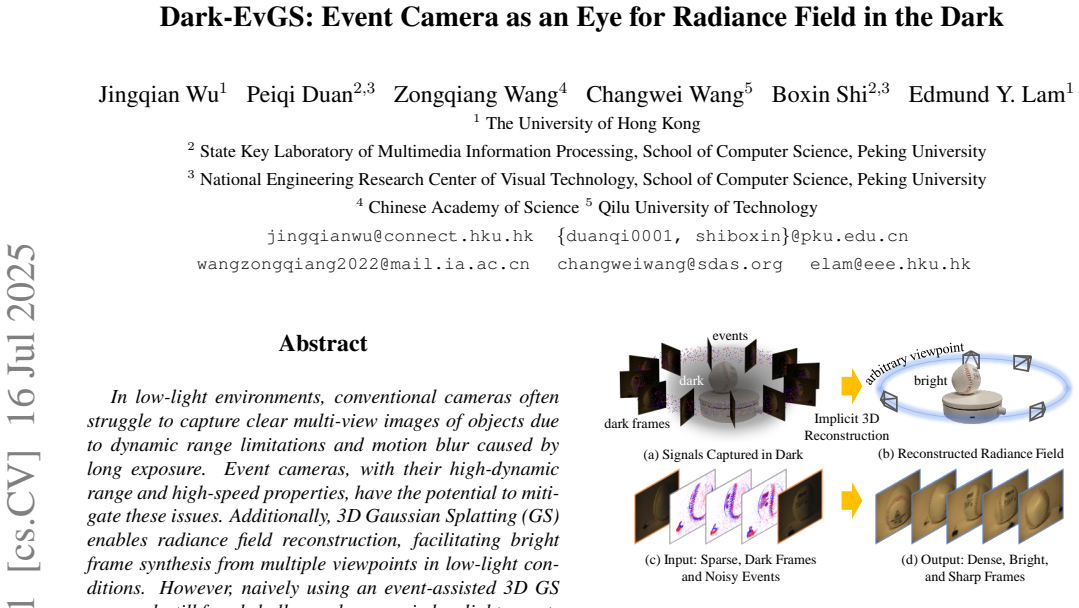
In low-light environments, conventional cameras often struggle to capture clear multi-view images of objects due to dynamic range limitations and motion blur caused by long exposure. Event cameras, with their high-dynamic range and high-speed properties, have the potential to mitigate these issues. Additionally, 3D Gaussian Splatting (GS) enables radiance field reconstruction, facilitating bright frame synthesis from multiple viewpoints in low-light conditions. However, naively using an event-assisted 3D GS approach still faced challenges because, in low light, events are noisy, frames lack quality, and the color tone may be inconsistent. To address these issues, we propose Dark-EvGS, the first event-assisted 3D GS framework that enables the reconstruction of bright frames from arbitrary viewpoints along the camera trajectory. Triplet-level supervision is proposed to gain holistic knowledge, granular details, and sharp scene rendering. The color tone matching block is proposed to guarantee the color consistency of the rendered frames. Furthermore, we introduce the first real-captured dataset for the event-guided bright frame synthesis task via 3D GS-based radiance field reconstruction. Experiments demonstrate that our method achieves better results than existing methods, conquering radiance field reconstruction under challenging low-light conditions. The code and sample data are included in the supplementary material.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents Dark-EvGS, the first event-assisted 3D Gaussian Splatting framework for reconstructing bright frames from arbitrary viewpoints along the camera trajectory in low-light conditions. It proposes triplet-level supervision to obtain holistic knowledge, granular details, and sharp scene rendering, together with a color tone matching block to enforce color consistency of rendered frames. The authors also introduce a new real-captured dataset for the event-guided bright-frame synthesis task and claim that experiments demonstrate superior performance over existing methods, thereby conquering radiance-field reconstruction under challenging low-light conditions.
Significance. If the experimental claims are substantiated, the work would offer a practical advance in low-light 3D reconstruction by combining the high-dynamic-range and high-temporal-resolution properties of event cameras with the efficiency of 3D Gaussian Splatting. The release of a dedicated real-world dataset would constitute a useful benchmark contribution for the community.
major comments (3)
- Abstract: the assertion that the method 'achieves better results than existing methods' and 'conquers' low-light reconstruction is unsupported by any quantitative metrics (PSNR, SSIM, LPIPS, etc.), error bars, or ablation tables, rendering the central claim unverifiable from the presented evidence.
- Method section (triplet-level supervision and color tone matching block): no ablation is reported that isolates whether these components extract usable independent signal from noisy low-light events or merely regularize toward the already degraded input frames; without such controls the necessity of the proposed blocks remains unproven.
- Experiments section: the manuscript provides neither controlled noise-injection tests nor removal ablations (with/without tone-matching block) nor color-histogram or artifact-map comparisons, leaving open the possibility that the rendered frames still rely on implicit post-processing rather than genuine event-driven radiance-field recovery.
minor comments (2)
- The abstract would be strengthened by the inclusion of at least one key quantitative result (e.g., average PSNR improvement) to support the superiority claim.
- Clarify the precise formulation and integration of the color tone matching block with the 3D GS optimization pipeline.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and have revised the manuscript to incorporate additional quantitative support and experimental controls as suggested.
read point-by-point responses
-
Referee: Abstract: the assertion that the method 'achieves better results than existing methods' and 'conquers' low-light reconstruction is unsupported by any quantitative metrics (PSNR, SSIM, LPIPS, etc.), error bars, or ablation tables, rendering the central claim unverifiable from the presented evidence.
Authors: We agree that the abstract would be strengthened by including specific quantitative metrics. In the revised manuscript, we will update the abstract to report key results such as average PSNR and SSIM gains over baselines, with references to the full tables, error bars, and ablations already present in the Experiments section. This will make the performance claims directly verifiable. revision: yes
-
Referee: Method section (triplet-level supervision and color tone matching block): no ablation is reported that isolates whether these components extract usable independent signal from noisy low-light events or merely regularize toward the already degraded input frames; without such controls the necessity of the proposed blocks remains unproven.
Authors: We appreciate this observation. While the original manuscript includes component-wise analysis, we will add targeted ablations in the revision that remove the triplet-level supervision and the color tone matching block individually. These will report quantitative metrics on both real and synthetic data to demonstrate that each component contributes recoverable signal from the events rather than simple regularization to the input frames. revision: yes
-
Referee: Experiments section: the manuscript provides neither controlled noise-injection tests nor removal ablations (with/without tone-matching block) nor color-histogram or artifact-map comparisons, leaving open the possibility that the rendered frames still rely on implicit post-processing rather than genuine event-driven radiance-field recovery.
Authors: We acknowledge the value of these additional controls. The revised manuscript will include controlled noise-injection experiments at varying levels, explicit removal ablations for the tone-matching block with before-and-after metrics, and supplementary visualizations consisting of color histograms and artifact maps. These additions will further illustrate that the radiance-field recovery is driven by the event data. revision: yes
Circularity Check
No significant circularity: empirical framework with external dataset and independent supervision signals
full rationale
The paper introduces Dark-EvGS as a new event-assisted 3D Gaussian Splatting framework for low-light radiance field reconstruction. It proposes triplet-level supervision for holistic/granular/sharp rendering and a color tone matching block for consistency, then validates on a newly collected real-captured dataset. No equations, parameters, or results reduce by construction to fitted inputs or self-defined quantities; the central claims rest on experimental comparisons against baselines using external event camera measurements rather than tautological re-labeling of inputs. This is a standard empirical contribution self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Event cameras provide high-dynamic-range and high-speed signals that remain useful for guiding radiance field reconstruction even when frames are noisy and low-quality.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Triplet-level supervision ... L = L_hol + λ1 L_event + λ2 L_mix ... Color Tone Matching Block (CTMB) ... y-noise filter
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
3D Gaussian Splatting ... Σ = R S S^T R^T ... rendering equation (4)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
SPADE-E2VID: Spatially-adaptive denormalization for event-based video reconstruction
Pablo Rodrigo Gantier Cadena, Yeqiang Qian, Chunxiang Wang, and Ming Yang. SPADE-E2VID: Spatially-adaptive denormalization for event-based video reconstruction. IEEE Transactions on Image Processing, 30:2488–2500, 2021. 2
work page 2021
-
[2]
Mul- timedia systems and equipment-color measurement and management-part 2-1
International Electrotechnical Commission et al. Mul- timedia systems and equipment-color measurement and management-part 2-1. Color management-Default RGB color space-sRGB, 1999. 4
work page 1999
-
[3]
E2GS: Event enhanced gaussian splatting
Hiroyuki Deguchi, Mana Masuda, Takuya Nakabayashi, and Hideo Saito. E2GS: Event enhanced gaussian splatting. In 2024 IEEE International Conference on Image Processing , pages 1676–1682. IEEE, 2024. 3, 7
work page 2024
-
[4]
EventZoom: Learning to denoise and super resolve neu- romorphic events
Peiqi Duan, Zihao W Wang, Xinyu Zhou, Yi Ma, and Boxin Shi. EventZoom: Learning to denoise and super resolve neu- romorphic events. In Proceedings of the IEEE/CVF con- ference on computer vision and pattern recognition , pages 12824–12833, 2021. 4
work page 2021
-
[5]
NeuroZoom: Denoising and super resolving neuromorphic events and spikes
Peiqi Duan, Yi Ma, Xinyu Zhou, Xinyu Shi, Zihao W Wang, Tiejun Huang, and Boxin Shi. NeuroZoom: Denoising and super resolving neuromorphic events and spikes. IEEE Transactions on Pattern Analysis and Machine Intelligence,
-
[6]
HyperE2VID: Improving event-based video reconstruction via hypernetworks
Burak Ercan, Onur Eker, Canberk Saglam, Aykut Erdem, and Erkut Erdem. HyperE2VID: Improving event-based video reconstruction via hypernetworks. IEEE Transactions on Image Processing, 2024. 1, 2
work page 2024
-
[7]
Event density based denoising method for dynamic vision sensor
Yang Feng, Hengyi Lv, Hailong Liu, Yisa Zhang, Yuyao Xiao, and Chengshan Han. Event density based denoising method for dynamic vision sensor. Applied Sciences, 10(6): 2024, 2020. 4, 5
work page 2024
-
[8]
Low-latency auto- motive vision with event cameras
Daniel Gehrig and Davide Scaramuzza. Low-latency auto- motive vision with event cameras. Nature, 629(8014):1034– 1040, 2024. 1
work page 2024
-
[9]
Event-3DGS: Event-based 3d reconstruction using 3d gaus- sian splatting
Haiqian Han, Jianing Li, Henglu Wei, and Xiangyang Ji. Event-3DGS: Event-based 3d reconstruction using 3d gaus- sian splatting. Advances in Neural Information Processing Systems, 37:128139–128159, 2025. 4
work page 2025
-
[10]
Hybrid high dynamic range imaging fusing neuromorphic and conven- tional images
Jin Han, Yixin Yang, Peiqi Duan, Chu Zhou, Lei Ma, Chao Xu, Tiejun Huang, Imari Sato, and Boxin Shi. Hybrid high dynamic range imaging fusing neuromorphic and conven- tional images. IEEE Transactions on pattern analysis and machine intelligence, 45(7):8553–8565, 2023. 2
work page 2023
-
[11]
v2e: From video frames to realistic dvs events
Yuhuang Hu, Shih-Chii Liu, and Tobi Delbruck. v2e: From video frames to realistic dvs events. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 1312–1321, 2021. 4, 7, 8
work page 2021
-
[12]
3D Gaussian Splatting for real-time radiance field rendering
Bernhard Kerbl, Georgios Kopanas, Thomas Leimk ¨uhler, and George Drettakis. 3D Gaussian Splatting for real-time radiance field rendering. ACM Transactions on Graphics, 42 (4):139–1, 2023. 2, 3, 6, 7, 8
work page 2023
-
[13]
E-NeRF: Neural radiance fields from a moving event camera
Simon Klenk, Lukas Koestler, Davide Scaramuzza, and Daniel Cremers. E-NeRF: Neural radiance fields from a moving event camera. IEEE Robotics and Automation Let- ters, 8(3):1587–1594, 2023. 3
work page 2023
-
[14]
Coherent event guided low-light video en- hancement
Jinxiu Liang, Yixin Yang, Boyu Li, Peiqi Duan, Yong Xu, and Boxin Shi. Coherent event guided low-light video en- hancement. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pages 10615–10625, 2023. 1, 2, 4, 6, 7, 8
work page 2023
-
[15]
Seeing motion at nighttime with an event camera
Haoyue Liu, Shihan Peng, Lin Zhu, Yi Chang, Hanyu Zhou, and Luxin Yan. Seeing motion at nighttime with an event camera. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages 25648– 25658, 2024. 1
work page 2024
-
[16]
NTIRE 2024 challenge on low light image enhancement: Methods and results
Xiaoning Liu, Zongwei Wu, Ao Li, Florin-Alexandru Vasluianu, Yulun Zhang, Shuhang Gu, Le Zhang, Ce Zhu, Radu Timofte, Zhi Jin, et al. NTIRE 2024 challenge on low light image enhancement: Methods and results. In Proceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 6571–6594, 2024. 1
work page 2024
-
[17]
NeRF: Representing scenes as neural radiance fields for view syn- thesis
Ben Mildenhall, Pratul P Srinivasan, Matthew Tancik, Jonathan T Barron, Ravi Ramamoorthi, and Ren Ng. NeRF: Representing scenes as neural radiance fields for view syn- thesis. Communications of the ACM , 65(1):99–106, 2021. 2
work page 2021
-
[18]
NeRF in the dark: High dynamic range view synthesis from noisy raw im- ages
Ben Mildenhall, Peter Hedman, Ricardo Martin-Brualla, Pratul P Srinivasan, and Jonathan T Barron. NeRF in the dark: High dynamic range view synthesis from noisy raw im- ages. In Proceedings of the IEEE/CVF conference on com- puter vision and pattern recognition , pages 16190–16199,
-
[19]
Federico Paredes-Vall ´es and Guido CHE De Croon. Back to event basics: Self-supervised learning of image reconstruc- tion for event cameras via photometric constancy. In Pro- ceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 3446–3455, 2021. 2
work page 2021
-
[20]
Events-To-Video: Bringing modern computer vision to event cameras
Henri Rebecq, Ren ´e Ranftl, Vladlen Koltun, and Davide Scaramuzza. Events-To-Video: Bringing modern computer vision to event cameras. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages 3857–3866, 2019. 1, 2, 4, 6, 7, 8
work page 2019
-
[21]
EventNeRF: Neural radiance fields from a single colour event camera
Viktor Rudnev, Mohamed Elgharib, Christian Theobalt, and Vladislav Golyanik. EventNeRF: Neural radiance fields from a single colour event camera. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 4992–5002, 2023. 2, 3, 4, 5, 6, 7, 8
work page 2023
-
[22]
Structure- from-motion revisited
Johannes L Schonberger and Jan-Michael Frahm. Structure- from-motion revisited. In IEEE Conference on Computer Vision and Pattern Recognition, pages 4104–4113, 2016. 6
work page 2016
-
[23]
Reducing the sim-to-real gap for event cam- eras
Timo Stoffregen, Cedric Scheerlinck, Davide Scaramuzza, Tom Drummond, Nick Barnes, Lindsay Kleeman, and Robert Mahony. Reducing the sim-to-real gap for event cam- eras. In Proceedings of the European Conference on Com- puter Vision, pages 534–549. Springer, 2020. 8
work page 2020
-
[24]
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszko- reit, Llion Jones, Aidan N Gomez, Łukasz Kaiser, and Illia Polosukhin. Attention is all you need. Advances in neural information processing systems, 30, 2017. 4
work page 2017
-
[25]
Jingqian Wu, Shuo Zhu, Chutian Wang, and Edmund Y . Lam. Ev-GS: Event-based gaussian splatting for efficient and accurate radiance field rendering. In 2024 IEEE Inter- national Workshop on Machine Learning for Signal Process- ing, pages 1–6, 2024. 2, 3, 4, 6, 7, 8
work page 2024
-
[26]
Jingqian Wu, Shuo Zhu, Chutian Wang, Boxin Shi, and Ed- mund Y Lam. SweepEvGS: Event-based 3D gaussian splat- ting for macro and micro radiance field rendering from a sin- gle sweep. IEEE Transactions on Circuits and Systems for Video technology, 2025. 7
work page 2025
-
[27]
Event3DGS: Event-based 3d gaussian splatting for high- speed robot egomotion
Tianyi Xiong, Jiayi Wu, Botao He, Cornelia Fermuller, Yiannis Aloimonos, Heng Huang, and Christopher Metzler. Event3DGS: Event-based 3d gaussian splatting for high- speed robot egomotion. In 8th Annual Conference on Robot Learning, 2024. 2, 3
work page 2024
-
[28]
SCI: A spec- trum concentrated implicit neural compression for biomedi- cal data
Runzhao Yang, Tingxiong Xiao, Yuxiao Cheng, Qianni Cao, Jinyuan Qu, Jinli Suo, and Qionghai Dai. SCI: A spec- trum concentrated implicit neural compression for biomedi- cal data. In Proceedings of the AAAI Conference on Artificial Intelligence, pages 4774–4782, 2023. 4
work page 2023
-
[29]
Latency correction for event-guided deblurring and frame interpolation
Yixin Yang, Jinxiu Liang, Bohan Yu, Yan Chen, Jimmy S Ren, and Boxin Shi. Latency correction for event-guided deblurring and frame interpolation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 24977–24986, 2024. 1
work page 2024
-
[30]
Differentiable surface splatting for point-based geometry processing
Wang Yifan, Felice Serena, Shihao Wu, Cengiz ¨Oztireli, and Olga Sorkine-Hornung. Differentiable surface splatting for point-based geometry processing. ACM Transactions on Graphics, 38(6):1–14, 2019. 3
work page 2019
-
[31]
EvaGaussians: Event stream as- sisted gaussian splatting from blurry images
Wangbo Yu, Chaoran Feng, Jiye Tang, Xu Jia, Li Yuan, and Yonghong Tian. EvaGaussians: Event stream as- sisted gaussian splatting from blurry images. arXiv preprint arXiv:2405.20224, 2024. 3
-
[32]
Sohaib Zahid, Viktor Rudnev, Eddy Ilg, and Vladislav Golyanik. E-3dgs: Event-based novel view rendering of large-scale scenes using 3d gaussian splatting.arXiv preprint arXiv:2502.10827, 2025. 3
-
[33]
Pei Zhang, Haosen Liu, Zhou Ge, Chutian Wang, and Ed- mund Y . Lam. Neuromorphic imaging with joint image de- blurring and event denoising. IEEE Transactions on Image Processing, 33:2318–2333, 2024. 2
work page 2024
-
[34]
Learning to see in the dark with events
Song Zhang, Yu Zhang, Zhe Jiang, Dongqing Zou, Jimmy Ren, and Bin Zhou. Learning to see in the dark with events. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages 666–682. Springer,
-
[35]
DarkGS: Learning neural illumination and 3d gaussians relighting for robotic exploration in the dark
Tianyi Zhang, Kaining Huang, Weiming Zhi, and Matthew Johnson-Roberson. DarkGS: Learning neural illumination and 3d gaussians relighting for robotic exploration in the dark. arXiv preprint arXiv:2403.10814, 2024. 2
-
[36]
Efficient non-line-of-sight tracking with com- putational neuromorphic imaging
Shuo Zhu, Zhou Ge, Chutian Wang, Jing Han, and Ed- mund Y Lam. Efficient non-line-of-sight tracking with com- putational neuromorphic imaging. Optics Letters , 49(13): 3584–3587, 2024. 2
work page 2024
-
[37]
Computational neuromorphic imaging: Prin- ciples and applications
Shuo Zhu, Chutian Wang, Haosen Liu, Pei Zhang, and Ed- mund Y Lam. Computational neuromorphic imaging: Prin- ciples and applications. In Computational Optical Imaging and Artificial Intelligence in Biomedical Sciences , pages 4– 10, 2024. 1
work page 2024
-
[38]
DEVO: Depth-event camera visual odometry in challenging conditions
Yi-Fan Zuo, Jiaqi Yang, Jiaben Chen, Xia Wang, Yifu Wang, and Laurent Kneip. DEVO: Depth-event camera visual odometry in challenging conditions. In 2022 International Conference on Robotics and Automation, pages 2179–2185,
work page 2022
-
[39]
Matthias Zwicker, Hanspeter Pfister, Jeroen Van Baar, and Markus Gross. Surface splatting. In Conference on Com- puter Graphics and Interactive Techniques, pages 371–378,
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.