A Robust 5G Terrestrial Positioning System with Sensor Fusion in GNSS-denied Scenarios
Pith reviewed 2026-05-19 03:19 UTC · model grok-4.3
The pith
A 5G system using carrier phase ranging, NLOS detection, and sensor fusion achieves under 5 meters positioning error in urban GNSS-denied areas.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
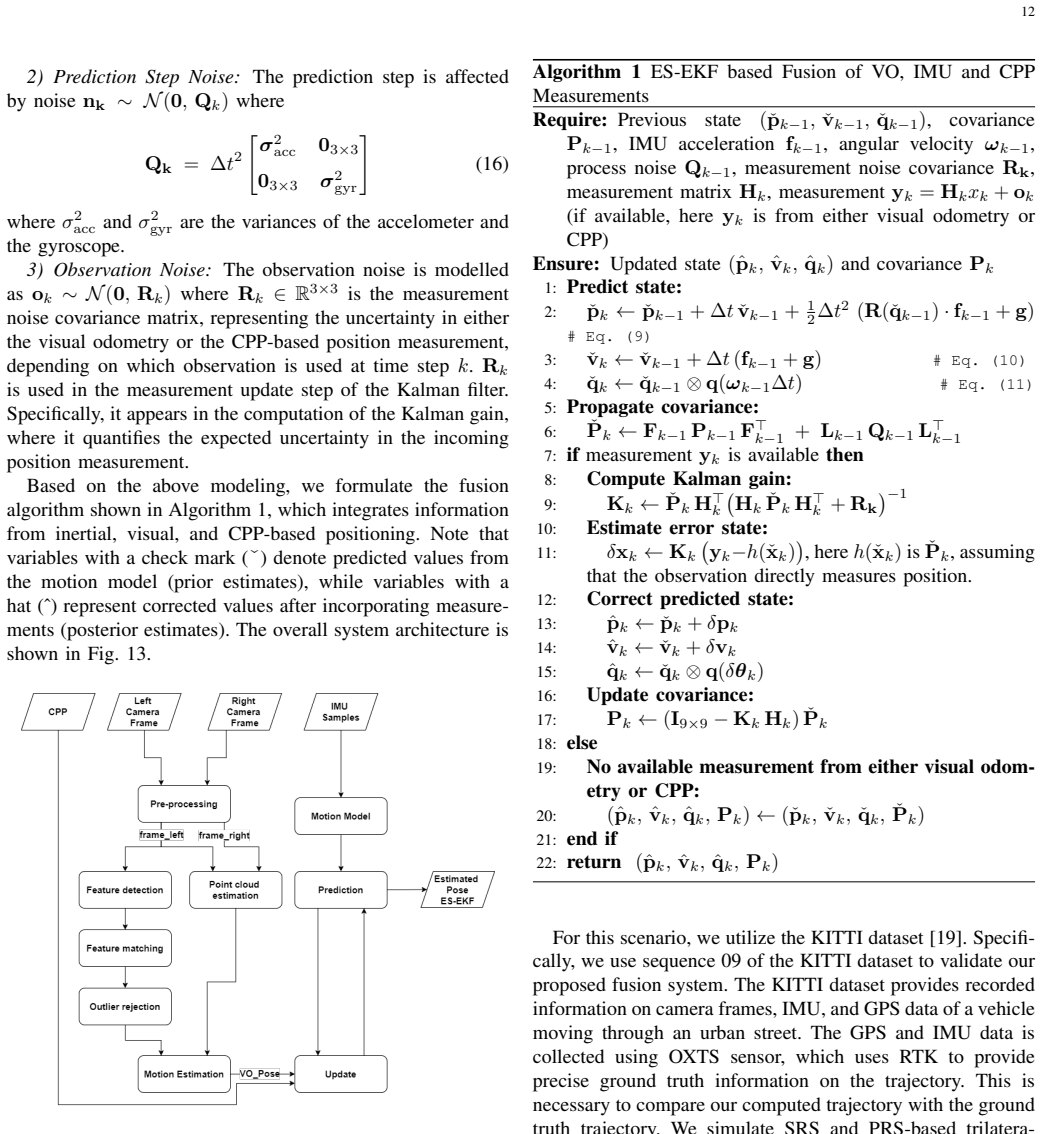
The central claim is that a terrestrial positioning architecture built on 5G infrastructure can localize a moving user to less than 5 meters error in urban settings by performing trilateration with multi-carrier carrier phase ranges from at least three line-of-sight base stations, using a neural network to identify and exclude non-line-of-sight links, and applying an error-state extended Kalman filter to fuse inertial measurement unit and camera observations whenever direct ranging becomes unreliable, as demonstrated through simulation on the KITTI dataset.
What carries the argument
Multi-carrier carrier phase trilateration combined with deep-learning NLOS link classification and error-state extended Kalman filter fusion of IMU and camera data.
If this is right
- With three or more line-of-sight base stations, the multi-carrier phase method supplies range measurements without separate integer ambiguity resolution.
- The trained deep learning model removes non-line-of-sight measurements before trilateration, preserving accuracy under partial obstruction.
- When line-of-sight is lost, the error-state Kalman filter keeps continuous tracking by incorporating inertial and visual updates.
- Overall system error stays below 5 meters on urban driving data, matching typical commercial GNSS performance.
Where Pith is reading between the lines
- The same sensor-fusion pipeline could be tested on pedestrian or indoor trajectories if 5G small-cell density increases.
- Network operators might treat positioning accuracy as a primary design goal rather than an add-on service.
- Real-time implementation on mobile devices would need to verify that the deep learning classifier runs within the latency budget of live 5G links.
Load-bearing premise
The simulation that overlays synthetic 5G carrier phase signals onto the KITTI vehicle trajectories correctly reproduces the real propagation conditions, base-station placement, and channel effects that would occur in an actual 5G network deployment.
What would settle it
A live measurement campaign that records positioning error while driving the same routes with actual 5G base stations transmitting at the modeled frequencies and powers.
Figures















read the original abstract
This paper presents a terrestrial localization system based on 5G infrastructure as a viable alternative to GNSS, particularly in scenarios where GNSS signals are obstructed or unavailable. It discusses network planning aimed at enabling positioning as a primary service, in contrast to the traditional focus on communication services in terrestrial networks. Building on a network infrastructure optimized for positioning, the paper proposes a system that leverages carrier phase (CP) ranging in combination with trilateration to localize the user within the network when at least three base stations (BSs) provide line-of-sight (LOS) conditions. Achieving accurate CP-based positioning requires addressing three key challenges: integer ambiguity resolution, LOS/NLOS link identification, and localization under obstructed LOS conditions. To this end, the system employs a multi-carrier CP approach, which eliminates the need for explicit integer ambiguity estimation. Additionally, a deep learning model is developed to identify NLOS links and exclude them from the trilateration process. In cases where LOS is obstructed and CP ranging becomes unreliable, the system incorporates an error-state extended Kalman filter to fuse complementary data from other sensors, such as inertial measurement units (IMUs) and cameras. This hybrid approach enables robust tracking of moving users across diverse channel conditions. The performance of the proposed terrestrial positioning system is evaluated using the real-world KITTI dataset, featuring a moving vehicle in an urban environment. Simulation results show that the system can achieve a positioning error of less than 5 meters in the KITTI urban scenario--comparable to that of public commercial GNSS services--highlighting its potential as a resilient and accurate solution for GNSS-denied environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a 5G terrestrial positioning system for GNSS-denied urban scenarios. It combines multi-carrier carrier-phase ranging and trilateration (when at least three LOS base stations are available), a deep-learning classifier to detect and exclude NLOS links, and an error-state EKF that fuses IMU and camera measurements when LOS is obstructed. Performance is assessed via simulations that overlay 5G carrier-phase signals on trajectories from the KITTI urban driving dataset, with the central claim that the system achieves positioning error below 5 m—comparable to commercial GNSS.
Significance. If the simulation parameters and channel models prove realistic, the hybrid CP-plus-sensor-fusion approach could offer a practical alternative for resilient positioning in GNSS-denied environments, particularly for vehicular applications. The work correctly identifies the three core challenges (integer ambiguity, NLOS identification, and partial LOS) and proposes concrete mitigations. The absence of real 5G hardware measurements or 3GPP-validated channel statistics, however, substantially reduces the strength of the performance claim.
major comments (2)
- [Simulation results / Evaluation] Simulation results section: the claim of <5 m error rests on an unvalidated overlay of 5G carrier-phase signals onto KITTI trajectories. No justification is given for base-station density, carrier frequency, phase-noise levels, LOS/NLOS statistics, or multipath severity; these quantities are not shown to match 3GPP urban macro or micro models or any real 5G deployment. Because the headline accuracy result is produced directly from these assumptions, the simulation setup is load-bearing for the central claim.
- [Proposed method / NLOS identification] Deep-learning NLOS classifier subsection: the manuscript describes the use of a DL model to identify NLOS links but supplies neither the network architecture, input features, training corpus, nor quantitative metrics (precision, recall, or confusion matrix). Without these details it is impossible to assess whether the classifier meaningfully improves trilateration accuracy or merely removes links under optimistic conditions.
minor comments (2)
- [Abstract] Abstract: the performance claim is stated without any numerical error statistics, simulation parameters, or DL accuracy figures; a single-sentence summary of these quantities would improve readability.
- [Throughout] Notation consistency: ensure that CP, LOS, NLOS, and EKF are defined at first use and used uniformly; several passages switch between “carrier phase” and “CP” without clear antecedent.
Simulated Author's Rebuttal
We thank the referee for the thorough review and valuable suggestions. We address the major comments point-by-point below, agreeing where revisions are needed to improve clarity and rigor.
read point-by-point responses
-
Referee: [Simulation results / Evaluation] Simulation results section: the claim of <5 m error rests on an unvalidated overlay of 5G carrier-phase signals onto KITTI trajectories. No justification is given for base-station density, carrier frequency, phase-noise levels, LOS/NLOS statistics, or multipath severity; these quantities are not shown to match 3GPP urban macro or micro models or any real 5G deployment. Because the headline accuracy result is produced directly from these assumptions, the simulation setup is load-bearing for the central claim.
Authors: We recognize that the simulation setup requires more detailed justification to align with realistic conditions. In the revised manuscript, we will expand the simulation results section to provide explicit justifications for base-station density, carrier frequency, phase-noise levels, LOS/NLOS statistics, and multipath severity. These will be chosen and validated against 3GPP TR 38.901 urban macro and micro channel models, with references to relevant literature on 5G deployments. We will also include sensitivity analyses to assess the impact of variations in these parameters on the positioning error, thereby supporting the robustness of the <5 m accuracy claim. revision: yes
-
Referee: [Proposed method / NLOS identification] Deep-learning NLOS classifier subsection: the manuscript describes the use of a DL model to identify NLOS links but supplies neither the network architecture, input features, training corpus, nor quantitative metrics (precision, recall, or confusion matrix). Without these details it is impossible to assess whether the classifier meaningfully improves trilateration accuracy or merely removes links under optimistic conditions.
Authors: We agree that the description of the deep learning-based NLOS classifier lacks necessary implementation details. We will revise the manuscript to provide a complete description, including the neural network architecture (specifying layers, activation functions, and input dimensions), the extracted features from the received signals, details on the training dataset (including how it was generated or sourced), and evaluation metrics such as accuracy, precision, recall, and the confusion matrix. Furthermore, we will include results demonstrating the classifier's contribution to the overall system performance through comparative experiments with and without the NLOS identification module. revision: yes
Circularity Check
No significant circularity in derivation or evaluation chain
full rationale
The paper proposes a 5G positioning architecture using multi-carrier carrier-phase ranging (to sidestep integer ambiguity), a deep-learning NLOS classifier, trilateration, and EKF-based fusion with IMU/camera data. The headline performance claim (<5 m error on KITTI urban trajectories) is obtained by applying this pipeline to synthetically overlaid 5G signals on real vehicle trajectories. No equation or result is shown to reduce, by construction, to a fitted parameter that is then re-labeled as a prediction, nor does any load-bearing step rest on a self-citation whose content is itself unverified. The simulation parameters are presented as design choices rather than quantities derived from the target accuracy metric. Consequently the reported positioning error is an independent empirical outcome of the described components rather than a tautological restatement of the inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption At least three base stations with line-of-sight conditions are available for trilateration.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
multi-carrier CP approach... deep learning model... error-state extended Kalman filter... KITTI urban scenario... positioning error of less than 5 meters
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
virtual wavelength... Δϕavg... trilateration under LOS
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Assessing jamming and spoofing impacts on GNSS receivers: Automatic gain control (AGC),
E. Ghizzo et al. , “Assessing jamming and spoofing impacts on GNSS receivers: Automatic gain control (AGC),” Signal Processing, vol. 228, p. 109762, 2025
work page 2025
-
[2]
Impact and detection of GNSS jammers on consumer grade satellite navigation receivers,
D. Borio et al., “Impact and detection of GNSS jammers on consumer grade satellite navigation receivers,” Proc. IEEE , vol. 104, no. 6, pp. 1233–1245, 2016
work page 2016
-
[3]
GNSS jammer localization and identification with airborne commercial GNSS receivers,
M. Spanghero et al., “GNSS jammer localization and identification with airborne commercial GNSS receivers,”IEEE Trans. Inf. Forensics Secur., 2025
work page 2025
-
[4]
Carrier phase ranging for indoor positioning with 5G NR signals,
L. Chen et al. , “Carrier phase ranging for indoor positioning with 5G NR signals,” IEEE Internet Things J. , vol. 9, no. 13, pp. 10 908–10 919, 2021
work page 2021
-
[5]
Simulation and analysis of device positioning in 5G ultra- dense network,
Q. Liu et al., “Simulation and analysis of device positioning in 5G ultra- dense network,” in IWCMC, 2019, pp. 1529–1533
work page 2019
-
[6]
Positioning reference signal design for positioning via 5G,
R. M. Ferre et al., “Positioning reference signal design for positioning via 5G,” in Finnish URSI Convention on Radio Science . URSI, 2019
work page 2019
-
[7]
Joint device positioning and clock synchronization in 5G ultra-dense networks,
M. Koivisto et al., “Joint device positioning and clock synchronization in 5G ultra-dense networks,” IEEE Trans. Wireless Commun. , vol. 16, no. 5, pp. 2866–2881, 2017
work page 2017
-
[8]
5G multi-BS positioning with a single-antenna receiver,
P. Gertzell et al. , “5G multi-BS positioning with a single-antenna receiver,” in IEEE PIMRC, 2020, pp. 1–5
work page 2020
-
[9]
Cooperative localization with constraint satisfaction problem in 5G vehicular networks,
H. Kim et al. , “Cooperative localization with constraint satisfaction problem in 5G vehicular networks,” Trans. Intell. Transp. Syst., vol. 23, no. 4, pp. 3180–3189, 2022
work page 2022
-
[10]
5G positioning-a machine learning approach,
M. Malmstr ¨om et al. , “5G positioning-a machine learning approach,” in 16th Workshop on Positioning, Navigation and Communications (WPNC). IEEE, 2019, pp. 1–6
work page 2019
-
[11]
RF fingerprinting and deep learning assisted ue positioning in 5G,
M. M. Butt et al. , “RF fingerprinting and deep learning assisted ue positioning in 5G,” in IEEE VTC-Spring, 2020, pp. 1–7
work page 2020
-
[12]
Deep learning architectures for accurate millimeter wave positioning in 5G,
J. Gante et al., “Deep learning architectures for accurate millimeter wave positioning in 5G,” Neural Processing Letters , vol. 51, no. 1, pp. 487– 514, 2020
work page 2020
-
[13]
Angle-delay profile-based and timestamp-aided dis- similarity metrics for channel charting,
P. Stephan et al. , “Angle-delay profile-based and timestamp-aided dis- similarity metrics for channel charting,” IEEE Transactions on Commu- nications, 2024
work page 2024
-
[14]
Toward cm-level accuracy: Carrier phase positioning for IIoT in 5G-advanced NR networks,
A. Fouda et al. , “Toward cm-level accuracy: Carrier phase positioning for IIoT in 5G-advanced NR networks,” in IEEE PIMRC , 2022, pp. 782–787
work page 2022
-
[15]
Recent progress on 3GPP 5G positioning,
Y . Wang et al. , “Recent progress on 3GPP 5G positioning,” in IEEE VTC-Spring. IEEE, 2023, pp. 1–6
work page 2023
-
[16]
5G NR positioning enhancements in 3GPP Release- 18,
H.-S. Cha et al., “5G NR positioning enhancements in 3GPP Release- 18,” IEEE Commun. Stds. Mag. , vol. 9, no. 1, pp. 22–27, 2025
work page 2025
-
[17]
L. Italiano et al., “A tutorial on 5G positioning,”IEEE Commun. Surveys Tuts., pp. 1–1, 2024
work page 2024
-
[18]
Carrier phase-based synchronization and high-accuracy positioning in 5G new radio cellular networks,
S. Fan et al. , “Carrier phase-based synchronization and high-accuracy positioning in 5G new radio cellular networks,” IEEE Trans. Commun., vol. 70, no. 1, pp. 564–577, 2021
work page 2021
-
[19]
Vision meets robotics: The KITTI dataset,
A. Geiger et al. , “Vision meets robotics: The KITTI dataset,” Int. J. Rob. Res. , vol. 32, no. 11, p. 1231–1237, Sep. 2013. [Online]. Available: https://doi.org/10.1177/0278364913491297
-
[20]
Sionna RT: Differentiable ray tracing for radio propagation modeling,
J. Hoydis et al. , “Sionna RT: Differentiable ray tracing for radio propagation modeling,” in IEEE GC Wkshps. IEEE, 2023, pp. 317–321
work page 2023
-
[21]
Study on expanded and improved NR positioning,
3GPP TR 38.859, “Study on expanded and improved NR positioning,” June 2024
work page 2024
-
[22]
J. Ou et al., “Single-shot carrier phase positioning method with wrapping effect solution in 5G new radio cellular networks,” in IEEE GLOBE- COM, 2024, pp. 313–318
work page 2024
-
[23]
A low complexity localization method based on 5G carrier phase,
Z. Deng and Z. Ma, “A low complexity localization method based on 5G carrier phase,” in 9th Intl. Conf. on Intelligent Computing and Signal Processing (ICSP), 2024, pp. 872–877
work page 2024
-
[24]
Positioning in 5G networks: Emerging techniques, use cases, and challenges,
M. Abuyaghi et al., “Positioning in 5G networks: Emerging techniques, use cases, and challenges,” IEEE Internet Things J. , vol. 12, no. 2, pp. 1408–1427, 2025
work page 2025
-
[25]
Fundamental performance bounds for carrier phase positioning in cellular networks,
H. Wymeersch et al. , “Fundamental performance bounds for carrier phase positioning in cellular networks,” in IEEE GLOBECOM , 2023, pp. 7478–7483
work page 2023
-
[26]
Y . Gao et al., “Improving non-line-of-sight identification in cellular po- sitioning systems using a deep autoencoding and generative adversarial network model,” Sensors, vol. 24, no. 1919, p. 6494, Jan. 2024
work page 1919
-
[27]
Machine-learning-based LOS detection for 5G signals with applications in airport environments,
P. A. N. Jayawardana et al., “Machine-learning-based LOS detection for 5G signals with applications in airport environments,” Sensors, vol. 23, no. 3, p. 1470, 2023
work page 2023
-
[28]
An ensemble ML model design to classify LOS/NLOS in 5G-NR InF propagation environment
H. Talebian et al. , “An ensemble ML model design to classify LOS/NLOS in 5G-NR InF propagation environment.”
-
[29]
L. Flueratoru et al., “Self-learning detection and mitigation of non-line- of-sight measurements in ultra-wideband localization,” in IEEE IPIN . IEEE, 2021, pp. 1–8
work page 2021
-
[30]
VINS-Mono: A robust and versatile monocular visual- inertial state estimator,
T. Qin et al. , “VINS-Mono: A robust and versatile monocular visual- inertial state estimator,” IEEE Transactions on Robotics , vol. 34, no. 4, pp. 1004–1020, 2018
work page 2018
-
[31]
Visual inertial odometry using coupled nonlinear optimization,
E. Hong and J. Lim, “Visual inertial odometry using coupled nonlinear optimization,” in 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2017, pp. 6879–6885
work page 2017
-
[32]
A multi-state constraint kalman filter for vision-aided inertial navigation,
A. I. Mourikis and S. I. Roumeliotis, “A multi-state constraint kalman filter for vision-aided inertial navigation,” in Proceedings 2007 IEEE International Conference on Robotics and Automation , 2007, pp. 3565– 3572
work page 2007
-
[33]
Visual-Inertial Odometry of Aerial Robots
D. Scaramuzza and Z. Zhang, “Visual-inertial odometry of aerial robots,” 2019. [Online]. Available: https://arxiv.org/abs/1906.03289
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[34]
Adaptive VIO: Deep visual-inertial odometry with online continual learning,
Y . Pan et al. , “Adaptive VIO: Deep visual-inertial odometry with online continual learning,” 2024. [Online]. Available: https: //arxiv.org/abs/2405.16754
-
[35]
UVIO: An UWB-Aided Visual-Inertial Odometry Framework with Bias-Compensated Anchors Initialization
G. Delama et al. , “UVIO: An UWB-aided visual-inertial odometry framework with bias-compensated anchors initialization,” 2023. [Online]. Available: https://arxiv.org/abs/2308.00513
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[36]
Toward 6G networks: Use cases and technologies,
M. Giordani et al., “Toward 6G networks: Use cases and technologies,” IEEE Commun. Mag. , vol. 58, no. 3, pp. 55–61, 2020
work page 2020
-
[37]
6G radio requirements to support integrated com- munication, localization, and sensing,
H. Wymeersch et al., “6G radio requirements to support integrated com- munication, localization, and sensing,” in EuCNC/6G Summit . IEEE, 2022, pp. 463–469
work page 2022
-
[38]
Survey of cellular mobile radio localiza- tion methods: From 1G to 5G,
J. A. del Peral-Rosado et al., “Survey of cellular mobile radio localiza- tion methods: From 1G to 5G,” IEEE Commun. Surveys Tuts. , vol. 20, no. 2, pp. 1124–1148, 2017
work page 2017
-
[39]
3GPP TS 38.305, “5G; NG Radio Access Network (NG-RAN); Stage 2 functional specification of User Equipment (UE) positioning in NG- RAN,” 2024, v18.3.0, Release 18
work page 2024
-
[40]
5G; NR; physical layer procedures for data,
3GPP TS 38.214, “5G; NR; physical layer procedures for data,” Dec. 2024, v18.4.0, Release 18
work page 2024
-
[41]
5G; NR; physical channels and modulation,
3GPP TS 38.211, “5G; NR; physical channels and modulation,” Dec. 2024, release 18
work page 2024
-
[42]
Release 18 description; summary of Rel-18 work items,
3GPP TR 21.918, “Release 18 description; summary of Rel-18 work items,” Mar. 2024
work page 2024
-
[43]
Study on channel model for frequencies from 0.5 to 100 GHz,
3GPP TR 38.901, “Study on channel model for frequencies from 0.5 to 100 GHz,” Mar. 2022
work page 2022
-
[44]
GNSS repeater based differential indoor positioning with multi- epoch measurements,
X. Li, “GNSS repeater based differential indoor positioning with multi- epoch measurements,” IEEE Transactions on Intelligent Vehicles, vol. 8, no. 1, pp. 1–813, oct 2021
work page 2021
-
[45]
Further discussion of NR RAT-dependent DL positioning,
3GPP Tdoc R1-1901980, “Further discussion of NR RAT-dependent DL positioning,” Mar. 2019
work page 2019
-
[46]
J. Nikonowicz et al. , “Indoor positioning in 5G-advanced: Challenges and solution toward centimeter-level accuracy with carrier phase en- hancements,” IEEE Wireless Commun. , vol. 31, no. 4, pp. 268–275, 2024
work page 2024
-
[47]
Remaining issues on NR DL and UL carrier phase positioning,
3GPP Tdoc R1-2306873, “Remaining issues on NR DL and UL carrier phase positioning,” August 2023
work page 2023
-
[48]
DF-VO: What should be learnt for visual odometry?
H. Zhan et al., “DF-VO: What should be learnt for visual odometry?”
-
[49]
Available: https://arxiv.org/abs/2103.00933
[Online]. Available: https://arxiv.org/abs/2103.00933
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.