Evaluating Artificial Intelligence Algorithms for the Standardization of Transtibial Prosthetic Socket Shape Design
Pith reviewed 2026-05-22 17:43 UTC · model grok-4.3
The pith
AI can predict transtibial prosthetic socket shapes from limb scans by learning prosthetist adaptations, with random forest reaching 1.24 mm median error.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Estimating the adaptations performed by prosthetists outperforms direct prediction of the final socket shape, and a random forest model applied to this adaptation task produces sockets whose median surface-to-surface distance from the expert designs is 1.24 millimeters.
What carries the argument
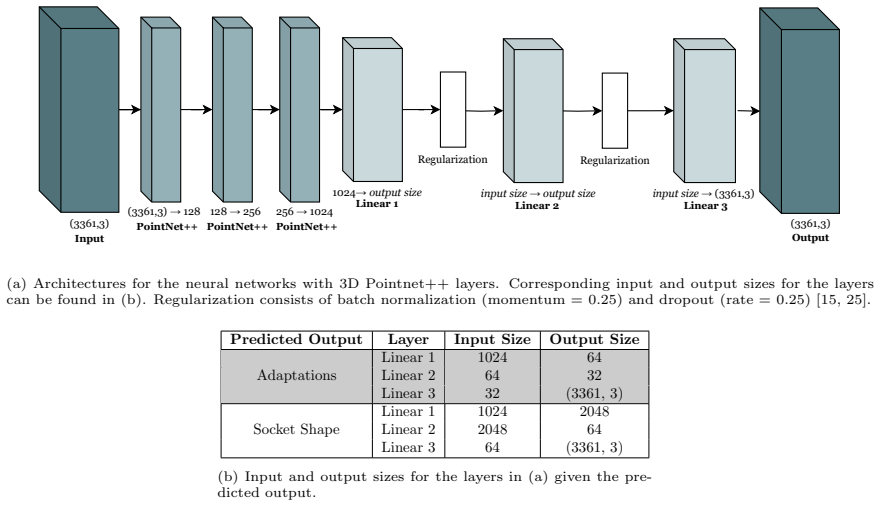
Adaptation prediction, in which models learn the modifications a prosthetist makes to a 3D limb scan to arrive at the socket, implemented after PCA-based compression and morphable model alignment.
Load-bearing premise
The sockets designed by prosthetists in the 118-patient dataset represent the appropriate target for standardization rather than one acceptable choice among several valid fits.
What would settle it
A new dataset in which multiple independent prosthetists each produce an acceptable socket for the same limbs; if the AI predictions systematically fall outside the variation among those expert sockets, the claim that the models standardize to an appropriate target would be falsified.
Figures








read the original abstract
The quality of a transtibial prosthetic socket depends on the prosthetist's skills and expertise, as the fitting is performed manually. This study investigates multiple artificial intelligence (AI) approaches to help standardize transtibial prosthetic socket design. Data from 118 patients were collected by prosthetists working in the Dutch healthcare system. This data consists of a three-dimensional (3D) scan of the residual limb and a corresponding 3D model of the prosthetist-designed socket. Multiple data pre-processing steps are performed for alignment, standardization and optionally compression using Morphable Models and Principal Component Analysis. Afterward, three different algorithms - a 3D neural network, Feedforward neural network, and random forest - are developed to either predict 1) the final socket shape or 2) the adaptations performed by a prosthetist to predict the socket shape based on the 3D scan of the residual limb. Each algorithm's performance was evaluated by comparing the prosthetist-designed socket with the AI-generated socket, using two metrics in combination with the error location. First, we measure the surface-to-surface distance to assess the overall surface error between the AI-generated socket and the prosthetist-designed socket. Second, distance maps between the AI-generated and prosthetist sockets are utilized to analyze the error's location. For all algorithms, estimating the required adaptations outperformed direct prediction of the final socket shape. The random forest model applied to adaptation prediction yields the lowest error with a median surface-to-surface distance of 1.24 millimeters, a first quartile of 1.03 millimeters, and a third quartile of 1.54 millimeters.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript evaluates three AI algorithms (3D neural network, feedforward neural network, and random forest) for predicting transtibial prosthetic socket shapes from 3D residual limb scans using a 118-patient Dutch clinical dataset. It compares direct socket prediction against predicting prosthetist-performed adaptations, reporting that random forest adaptation prediction achieves the lowest error with a median surface-to-surface distance of 1.24 mm (Q1 1.03 mm, Q3 1.54 mm) relative to the prosthetist-designed sockets, and concludes this supports standardization of socket design.
Significance. If the results hold under proper validation, the work provides a concrete baseline for AI-assisted prosthetic design by showing millimeter-scale surface accuracy on real patient data and demonstrating that adaptation prediction outperforms direct shape regression. The multi-model comparison and use of surface distance plus error maps offer practical insights for the field. Significance is tempered by the absence of inter-expert variability benchmarks or outcome linkage, which limits claims about achieving true standardization rather than replicating one expert's style.
major comments (2)
- [Results] Results section (performance reporting): The abstract and results report concrete median and quartile surface distances (e.g., 1.24 mm for RF adaptation) but supply no information on train-test splits, cross-validation, hyperparameter search, or statistical testing of differences between models. This is load-bearing for the central claim that RF yields the lowest error.
- [Introduction / Methods] Introduction and Methods (ground-truth definition): The claim that the AI approaches advance standardization of socket design rests on treating the single prosthetist-designed socket per patient as the target. No inter-prosthetist agreement statistics, repeated designs on the same limbs, or linkage to fit comfort/functional outcomes are reported. If typical inter-expert surface distances exceed the reported AI error, the numerical result shows replication of a particular design rather than reduction of variability.
minor comments (2)
- [Abstract] Abstract: The description of the 118-patient dataset and the two prediction strategies (direct vs. adaptation) could be stated more explicitly to clarify the experimental design before the performance numbers.
- [Figures] Figure clarity: Distance maps are mentioned for error location analysis; ensure color scales and anatomical landmarks are labeled consistently across examples to allow readers to interpret regional error patterns.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on validation details and the interpretation of our standardization claims. We respond point-by-point to the major comments below.
read point-by-point responses
-
Referee: [Results] Results section (performance reporting): The abstract and results report concrete median and quartile surface distances (e.g., 1.24 mm for RF adaptation) but supply no information on train-test splits, cross-validation, hyperparameter search, or statistical testing of differences between models. This is load-bearing for the central claim that RF yields the lowest error.
Authors: We agree that explicit details on the experimental protocol are necessary to support the performance claims. The revised manuscript will add a dedicated 'Model Training and Evaluation' subsection in Methods that reports the train-test partitioning strategy (including any patient-level stratification to avoid leakage), cross-validation procedure if employed, hyperparameter selection method, and statistical comparisons (e.g., Wilcoxon signed-rank tests with correction for multiple comparisons) between the three models on the surface-to-surface distance metric. These additions will directly substantiate the reported superiority of the random forest adaptation model. revision: yes
-
Referee: [Introduction / Methods] Introduction and Methods (ground-truth definition): The claim that the AI approaches advance standardization of socket design rests on treating the single prosthetist-designed socket per patient as the target. No inter-prosthetist agreement statistics, repeated designs on the same limbs, or linkage to fit comfort/functional outcomes are reported. If typical inter-expert surface distances exceed the reported AI error, the numerical result shows replication of a particular design rather than reduction of variability.
Authors: We accept the critique on the scope of the standardization claim. Our 118-patient dataset contains one expert-designed socket per residual limb, and the models learn to predict the adaptations performed in that clinical context. In the revision we will (i) rephrase the Introduction and Discussion to state that the work demonstrates accurate replication of prosthetist adaptations rather than reduction of inter-expert variability, and (ii) add an explicit Limitations paragraph noting the absence of multi-prosthetist repeated designs and clinical outcome linkage, while recommending these as directions for future multi-center studies. revision: partial
- Absence of repeated socket designs by multiple prosthetists on the same limbs prevents computation of inter-expert surface distance statistics from the current dataset.
Circularity Check
No significant circularity; standard supervised ML evaluation on external dataset.
full rationale
The paper trains models (3D NN, FFNN, random forest) on 118-patient data to predict either final socket shape or prosthetist adaptations from residual-limb scans, then evaluates surface-to-surface distance against the held-out prosthetist-designed sockets. No equations, ansatzes, or self-citations are shown that reduce the reported median error (1.24 mm) to a fitted parameter or input by construction. Pre-processing (alignment, Morphable Models, PCA) is standard and does not create self-definitional loops. The central claim remains an empirical performance number on independent test cases rather than a tautology.
Axiom & Free-Parameter Ledger
free parameters (2)
- PCA compression level
- Random forest hyperparameters
axioms (1)
- domain assumption Prosthetist-designed sockets represent the desired standardized output
Reference graph
Works this paper leans on
-
[1]
URL: https://www.who.int/publications/i/item/ 9789241512480
WHO & USAID, Health Product Policy and Standards, Who standards for prosthetics and orthotics, www.who.int (2017). URL: https://www.who.int/publications/i/item/ 9789241512480
work page 2017
-
[2]
Limbs international, Why limbs (Date accessed: 26-03-2025). URL: https://www. limbsinternational.org/why-limbs.html
work page 2025
-
[3]
J. S. Jensen, W. Raab, J. R. Fisk, C. Hartz, A. Saldana, C. Harte, Quality of polypropy- lene sockets for Trans-Tibial prostheses in Low-Income countries, Prosthetics and Orthotics International 30 (2006) 45–59. doi: 10.1080/03093640600568336
- [4]
-
[5]
C. W. Radcliffe, The patellar-tendon-bearing below-knee prosthesis, Biomechanics Laboratory (1961)
work page 1961
-
[6]
T. B. Staats, J. Lundt, The ucla total surface bearing suction below-knee prosthesis, Clinical prosthetics and orthotics 11 (1987)
work page 1987
-
[7]
R. Safari, Lower limb prosthetic interfaces: Clinical and technological advancement and po- tential future direction, Prosthetics and orthotics international 44 (2020) 384–401
work page 2020
-
[8]
G. Colombo, G. Facoetti, C. Rizzi, Automatic below-knee prosthesis socket design: a pre- liminary approach, in: Digital Human Modeling: Applications in Health, Safety, Ergonomics and Risk Management: 7th International Conference, DHM 2016, Held as Part of HCI In- ternational 2016, Toronto, ON, Canada, July 17-22, 2016, Proceedings 7, Springer, 2016, pp. 75–81
work page 2016
-
[9]
S. Li, H. Lan, X. Luo, Y. Lv, L. Gao, H. Yu, Quantitative compensation design for prosthetic socket based on eigenvector algorithm method, Review of Scientific Instruments 90 (2019)
work page 2019
-
[10]
A. Dickinson, L. Diment, R. Morris, E. Pearson, D. Hannett, J. Steer, Characterising residual limb morphology and prosthetic socket design based on expert clinician practice, Prosthesis 3 (2021) 280–299
work page 2021
-
[11]
A. G. Cutti, M. G. Santi, A. H. Hansen, S. Fatone, R. L. S. C. Group, Prosthetist-specific recti- fication templates based on artificial intelligence for the digital fabrication of custom transtibial sockets, Prosthesis 6 (2024) 1149–1169. 15
work page 2024
-
[12]
M. van der Stelt, B. Berends, M. Papenburg, T. Langenhuyzen, T. Maal, L. Brouwers, G. de Jong, R. Leijendekkers, Evaluating the effectiveness of transtibial prosthetic socket shape design using artificial intelligence: A clinical comparison with traditional plaster cast socket designs, Archives of physical medicine and rehabilitation (2024)
work page 2024
- [13]
-
[14]
Y. Li, R. Bu, M. Sun, W. Wu, X. Di, B. Chen, Pointcnn: Convolution on x-transformed points, Advances in neural information processing systems 31 (2018)
work page 2018
-
[15]
C. R. Qi, L. Yi, H. Su, L. J. Guibas, Pointnet++: Deep hierarchical feature learning on point sets in a metric space, Advances in neural information processing systems 30 (2017)
work page 2017
-
[16]
J. D. White, A. Ortega-Castrill´ on, H. Matthews, A. A. Zaidi, O. Ekrami, J. Snyders, Y. Fan, T. Penington, S. Van Dongen, M. D. Shriver, et al., Meshmonk: Open-source large-scale intensive 3d phenotyping, Scientific reports 9 (2019) 6085
work page 2019
-
[17]
C. R. Qi, H. Su, K. Mo, L. J. Guibas, Pointnet: Deep learning on point sets for 3d classification and segmentation, in: Proceedings of the IEEE conference on computer vision and pattern recognition, 2017, pp. 652–660
work page 2017
-
[18]
M. van der Stelt, T. J. J. Maal, C. H. E. Jordaan, Transtibial prosthetic socket shape design using artificial intelligence, Radboud Data Repository, 2024. doi: 10.34973/hcq4-9296
-
[19]
A. Dickinson, J. Steer, C. Rossides, L. Diment, F. Mbithi, J. Bramley, D. Hannett, J. Blinova, Z. Tankard, P. Worsley, Insights into the spectrum of transtibial prosthetic socket design from expert clinicians and their digital records, Frontiers in Rehabilitation Sciences 5 (2024) 1354069
work page 2024
-
[20]
Python Software Foundation, Python programming language, 2019. URL: https://www. python.org/
work page 2019
-
[21]
E. Bermejo, K. Taniguchi, Y. Ogawa, R. Martos, A. Valsecchi, P. Mesejo, O. Ib´ a˜ nez, K. Imaizumi, Automatic landmark annotation in 3d surface scans of skulls: Methodological proposal and reliability study, Computer Methods and Programs in Biomedicine 210 (2021) 106380
work page 2021
-
[22]
J. Ansel, E. Yang, H. He, N. Gimelshein, A. Jain, M. Voznesensky, B. Bao, P. Bell, D. Be- rard, E. Burovski, G. Chauhan, A. Chourdia, W. Constable, A. Desmaison, Z. DeVito, E. El- lison, W. Feng, J. Gong, M. Gschwind, B. Hirsh, S. Huang, K. Kalambarkar, L. Kirsch, M. Lazos, M. Lezcano, Y. Liang, J. Liang, Y. Lu, C. Luk, B. Maher, Y. Pan, C. Puhrsch, M. Re...
-
[23]
D. P. Kingma, J. Ba, Adam: A method for stochastic optimization, 2015. arXiv:1412.6980. 16
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[24]
Biewald, Experiment tracking with weights and biases, 2020
L. Biewald, Experiment tracking with weights and biases, 2020. URL: https://www.wandb. com/, software available from wandb.com
work page 2020
-
[25]
Yan, Pointnet/pointnet++ pytorch, 2019
X. Yan, Pointnet/pointnet++ pytorch, 2019. URL: https://github.com/yanx27/Pointnet_ Pointnet2_pytorch
work page 2019
-
[26]
A. S. Dickinson, M. K. Donovan-Hall, S. Kheng, K. Bou, A. Tech, J. W. Steer, C. D. Metcalf, P. R. Worsley, Selecting appropriate 3d scanning technologies for prosthetic socket design and transtibial residual limb shape characterization, JPO: Journal of Prosthetics and Orthotics 34 (2022) 33–43. Appendix A. Pre-processing Figure A.10: An example of a 3D sc...
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.