A Data-Driven Optimal Control Architecture for Grid-Connected Power Converters
Pith reviewed 2026-05-18 23:49 UTC · model grok-4.3
The pith
Grid-connected power converters can achieve optimal control by learning grid behavior directly from measured input-output data instead of using simplified models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We employ a data-enabled predictive control (DeePC) to perform data-driven, optimal, robust, and adaptive control for power converters. We call the converters that are operated in this way DeePConverters. A DeePConverter can implicitly perceive the characteristics of the power grid from measured data and adjust its control strategy to achieve optimal, robust, and adaptive performance. The paper presents the modular configurations, generalized structure, control behavior specification, inherent robustness, detailed implementation, computational aspects, and online adaptation of DeePConverters, validated through high-fidelity simulations and hardware-in-the-loop tests.
What carries the argument
The DeePConverter, which applies data-enabled predictive control to use past input-output measurements for formulating and solving an online optimization problem that determines future control inputs.
If this is right
- The converter maintains desired performance across grid variations without manual retuning of parameters.
- Robustness to modeling errors and uncertainties arises inherently from the data-driven formulation.
- Online adaptation updates the control law continuously as new measurements arrive.
- The same architecture supports multiple objectives such as grid synchronization and active/reactive power regulation through modular configuration.
Where Pith is reading between the lines
- Widespread adoption could simplify commissioning of new renewable plants by reducing dependence on detailed grid studies.
- The approach may extend naturally to coordinated control of multiple converters sharing the same unknown grid.
- Computational cost of solving the data-driven optimization at each step would need to remain compatible with typical converter sampling rates.
Load-bearing premise
That measured input-output data from the converter is sufficient to capture the relevant dynamics of the unknown, complex, and variable power grid for the purposes of DeePC optimization and online adaptation.
What would settle it
A hardware-in-the-loop experiment in which the DeePConverter loses stability or fails to regulate power when grid impedance or topology changes in a manner absent from the initial data collection window.
Figures








read the original abstract
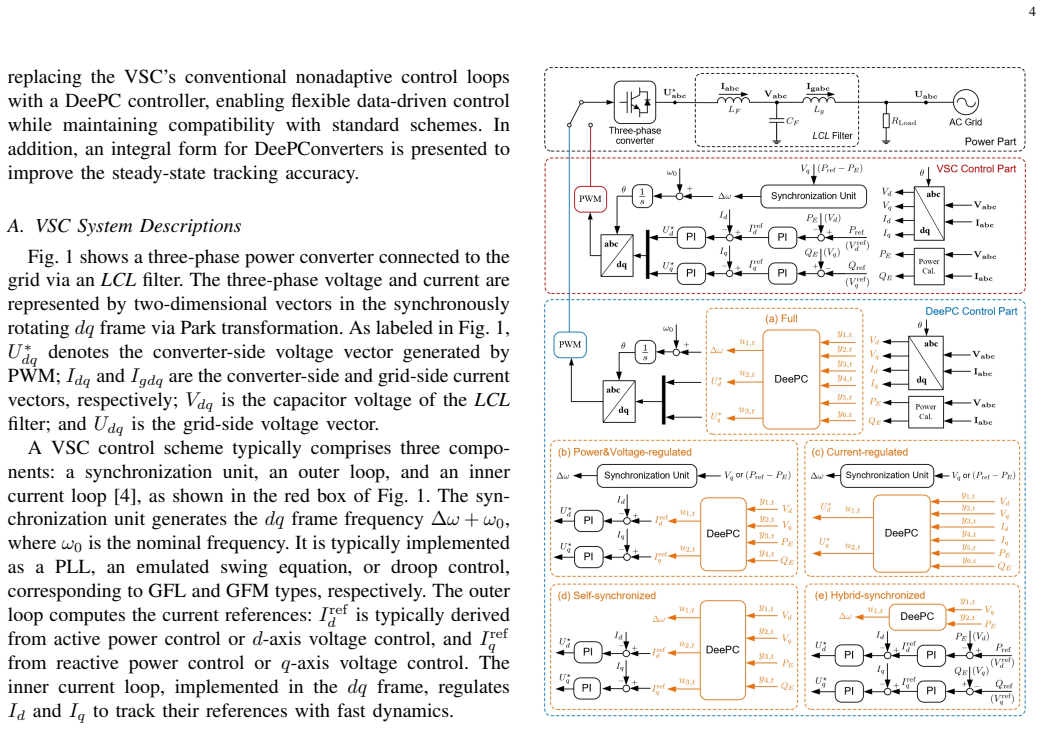
Grid-connected power converters are ubiquitous in modern power systems, acting as grid interfaces of renewable energy sources, energy storage systems, electric vehicles, high-voltage DC systems, etc. Conventionally, power converters use multiple PID regulators to achieve different control objectives such as grid synchronization and voltage/power regulation, where the PID parameters are usually tuned based on a presumed (and often overly-simplified) power grid model. However, this may lead to inferior performance or even instabilities in practice, as the real power grid is highly complex, variable, and generally unknown. To tackle this problem, we employ a data-enabled predictive control (DeePC) to perform data-driven, optimal, robust, and adaptive control for power converters. We call the converters that are operated in this way DeePConverters. A DeePConverter can implicitly perceive the characteristics of the power grid from measured data and adjust its control strategy to achieve optimal, robust, and adaptive performance. We present the modular configurations, generalized structure, control behavior specification, inherent robustness, detailed implementation, computational aspects, and online adaptation of DeePConverters. High-fidelity simulations and hardware-in-the-loop (HIL) tests are provided to validate the effectiveness of DeePConverters.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes DeePConverters, a data-driven control architecture for grid-connected power converters based on Data-enabled Predictive Control (DeePC). It argues that by using measured input-output trajectories, the converter can implicitly capture unknown and variable grid dynamics to achieve optimal, robust, and adaptive performance without relying on explicit models or PID tuning. The manuscript covers modular configurations, generalized structure, control specifications, robustness properties, implementation details, computational aspects, and online adaptation, with validation claimed via high-fidelity simulations and hardware-in-the-loop (HIL) tests.
Significance. If the central claims hold, the work could offer a practical model-free alternative for controlling converters interfacing renewables and storage in complex grids, potentially improving stability where traditional model-based methods fail due to grid variability. The emphasis on modular structure and online adaptation is a constructive contribution to the DeePC literature in power electronics, though the approach retains free parameters such as prediction horizon and data window lengths.
major comments (2)
- [Abstract] Abstract: The validation claim rests on 'high-fidelity simulations and HIL tests' yet provides no quantitative error metrics, performance indices, or comparison baselines against conventional PID or model-based controllers. This absence makes it impossible to assess whether the DeePC-based strategy delivers measurable improvements in robustness or adaptation under grid variations.
- [Online adaptation] Online adaptation section: The description of online adaptation does not specify the mechanism for refreshing the data window or ensuring persistency of excitation when the grid experiences abrupt changes (e.g., line switching or distant load steps). Without this, the Hankel-based predictor may lose accuracy, directly undermining the claim that local I/O data suffices to encode the effective grid impedance for stable QP solutions.
minor comments (2)
- [Implementation] Notation for the data matrices and behavioral model could be clarified with explicit definitions of the Hankel matrix dimensions and the role of the regularization parameters in the DeePC optimization.
- [Computational aspects] The manuscript would benefit from a dedicated table summarizing the free parameters (prediction horizon, data window length) and their tuning guidelines or sensitivity analysis.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We have addressed each major comment point by point below, agreeing where revisions are needed to improve clarity and completeness.
read point-by-point responses
-
Referee: [Abstract] Abstract: The validation claim rests on 'high-fidelity simulations and HIL tests' yet provides no quantitative error metrics, performance indices, or comparison baselines against conventional PID or model-based controllers. This absence makes it impossible to assess whether the DeePC-based strategy delivers measurable improvements in robustness or adaptation under grid variations.
Authors: We agree that the abstract would be strengthened by including explicit quantitative metrics and direct comparisons. While the full manuscript contains simulation and HIL results illustrating performance under grid variations (including tracking behavior and adaptation), we did not tabulate error metrics or baselines against PID/model-based methods. In the revised version we will update the abstract with key indices such as RMS tracking error and settling time, and add a comparison subsection with quantitative results against conventional controllers. revision: yes
-
Referee: [Online adaptation] Online adaptation section: The description of online adaptation does not specify the mechanism for refreshing the data window or ensuring persistency of excitation when the grid experiences abrupt changes (e.g., line switching or distant load steps). Without this, the Hankel-based predictor may lose accuracy, directly undermining the claim that local I/O data suffices to encode the effective grid impedance for stable QP solutions.
Authors: We thank the referee for highlighting this point. The online adaptation section explains that the data window is refreshed with new input-output measurements to capture time-varying grid dynamics, but we acknowledge that the precise update rule, conditions for maintaining persistency of excitation, and handling of abrupt events (such as line switching) are not detailed enough. In the revision we will expand this section with the explicit data-window refresh algorithm, a discussion of persistency requirements, and additional analysis or pseudocode showing that the resulting QP remains well-posed and stable. revision: yes
Circularity Check
No significant circularity; derivation applies established DeePC to new domain
full rationale
The paper presents a data-driven DeePC architecture for grid-connected converters, collecting measured I/O trajectories to construct the behavioral model and solve the resulting QP for control inputs. This follows the standard non-parametric DeePC formulation from prior literature without reducing any claimed prediction to a fitted parameter or self-referential definition within the paper's equations. Validation via high-fidelity simulations and HIL tests provides external checks independent of the derivation chain. Self-references to DeePC are to an established method with independent mathematical foundations (behavioral systems theory) and do not bear the load of proving the specific converter application. No load-bearing step equates outputs to inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- prediction horizon and data window lengths
axioms (1)
- domain assumption Input-output data collected from the converter-grid system is persistently exciting and representative of future behavior.
Forward citations
Cited by 1 Pith paper
-
Model-Free Power System Stability Enhancement with Dissipativity-Based Neural Control
Neural networks learn dissipativity matrices from data to create a model-free controller that improves transient stability in all-VSG power systems.
Reference graph
Works this paper leans on
-
[1]
Status of renewable energy grid integration in 2024,
N. E. A. of China, “Status of renewable energy grid integration in 2024,” NEA Online Reports, 2025, available: https://www.nea.gov.cn/20250221/ e10f363cabe3458aaf78ba4558970054/c.html
-
[2]
“Communication from the commission to the european parliament, the european council, the council, the european economic and social committee and the committee of the regions,”REPowerEU Plan, 2022
work page 2022
-
[3]
Foundations and challenges of low-inertia systems,
F. Milano, F. D ¨orfler, G. Hug, D. J. Hill, and G. Verbiˇc, “Foundations and challenges of low-inertia systems,” in2018 power systems computation conference (PSCC). IEEE, 2018, pp. 1–25
work page 2018
-
[4]
Control of power converters in AC microgrids,
J. Rocabert, A. Luna, F. Blaabjerg, and P. Rodriguez, “Control of power converters in AC microgrids,”IEEE Trans. Power Electron., vol. 27, no. 11, pp. 4734–4749, 2012
work page 2012
-
[5]
Grid-synchronization stability of converter-based resources—an overview,
X. Wang, M. G. Taul, H. Wu, Y . Liao, F. Blaabjerg, and L. Harne- fors, “Grid-synchronization stability of converter-based resources—an overview,”IEEE Open J. Ind. Appl., vol. 1, pp. 115–134, 2020
work page 2020
-
[6]
Impedance-based stability criterion for grid-connected invert- ers,
J. Sun, “Impedance-based stability criterion for grid-connected invert- ers,”IEEE Trans. Power Electron., vol. 26, no. 11, pp. 3075–3078, 2011
work page 2011
-
[7]
Unified impedance model of grid-connected voltage-source converters,
X. Wang, L. Harnefors, and F. Blaabjerg, “Unified impedance model of grid-connected voltage-source converters,”IEEE Trans. Power Electron., vol. 33, no. 2, pp. 1775–1787, 2017
work page 2017
-
[8]
Overview of control and grid synchronization for distributed power generation systems,
F. Blaabjerget al., “Overview of control and grid synchronization for distributed power generation systems,”IEEE Trans. Ind. Electron., vol. 53, no. 5, pp. 1398–1409, 2006
work page 2006
-
[9]
S. D’Arco, J. A. Suul, and O. B. Fosso, “A virtual synchronous machine implementation for distributed control of power converters in smartgrids,”Elect. Power Syst. Res., vol. 122, pp. 180–197, 2015
work page 2015
-
[10]
Subsynchronous interaction between direct-drive PMSG based wind farms and weak AC networks,
H. Liuet al., “Subsynchronous interaction between direct-drive PMSG based wind farms and weak AC networks,”IEEE Trans. Power Syst., vol. 32, no. 6, pp. 4708–4720, 2017
work page 2017
-
[11]
Wind energy systems subsyn- chronous oscillations: Events and modeling,
Y . Cheng, L. Fan, and J. Roseet al., “Wind energy systems subsyn- chronous oscillations: Events and modeling,”IEEE Power and Energy Society, Technical Report, PES-TR80, 2020
work page 2020
-
[12]
A note on persistency of excitation,
J. C. Willemset al., “A note on persistency of excitation,”Systems & Control Letters, vol. 54, no. 4, pp. 325–329, 2005
work page 2005
-
[13]
Data-driven control based on the behavioral approach: From theory to applications in power systems,
I. Markovsky, L. Huang, and F. D ¨orfler, “Data-driven control based on the behavioral approach: From theory to applications in power systems,” IEEE Control Syst. Mag., vol. 43, no. 5, pp. 28–68, 2023
work page 2023
-
[14]
Data-enabled predictive con- trol: In the shallows of the DeePC,
J. Coulson, J. Lygeros, and F. D ¨orfler, “Data-enabled predictive con- trol: In the shallows of the DeePC,” in2019 18th European Control Conference (ECC). IEEE, 2019, pp. 307–312
work page 2019
-
[15]
Formulas for data-driven control: Stabilization, optimality, and robustness,
C. De Persis and P. Tesi, “Formulas for data-driven control: Stabilization, optimality, and robustness,”IEEE Trans. Autom. Control, vol. 65, no. 3, pp. 909–924, 2019
work page 2019
-
[16]
Data-driven model predictive control with stability and robustness guarantees,
J. Berberich, J. K ¨ohler, M. A. Muller, and F. Allgower, “Data-driven model predictive control with stability and robustness guarantees,”IEEE Trans. Autom. Control, vol. 66, no. 4, pp. 1702–1717, 2021
work page 2021
-
[17]
Robust data-enabled predictive control: Tractable formulations and performance guarantees,
L. Huang, J. Zhen, J. Lygeros, and F. D ¨orfler, “Robust data-enabled predictive control: Tractable formulations and performance guarantees,” IEEE Trans. Autom. Control, vol. 68, no. 5, pp. 3163–3170, 2023
work page 2023
-
[18]
Data-enabled predictive control for grid-connected power converters,
L. Huanget al., “Data-enabled predictive control for grid-connected power converters,” in2019 IEEE 58th Conference on Decision and Control (CDC). IEEE, 2019, pp. 8130–8135
work page 2019
-
[19]
Decentralized data- enabled predictive control for power system oscillation damping,
L. Huang, J. Coulson, J. Lygeros, and F. D ¨orfler, “Decentralized data- enabled predictive control for power system oscillation damping,”IEEE Trans. Control Syst. Technol., vol. 30, no. 3, pp. 1065–1077, 2021
work page 2021
-
[20]
Data-driven predictive current control for syn- chronous motor drives,
P. G. Carletet al., “Data-driven predictive current control for syn- chronous motor drives,” in2020 IEEE Energy Conversion Congress and Exposition (ECCE). IEEE, 2020, pp. 5148–5154
work page 2020
-
[21]
Adaptive robust data-driven building control via bilevel reformulation: An experimental result,
Y . Lian, J. Shi, M. Koch, and C. N. Jones, “Adaptive robust data-driven building control via bilevel reformulation: An experimental result,”IEEE Trans. Control Syst. Technol., vol. 31, no. 6, pp. 2420–2436, 2023
work page 2023
-
[22]
Data- enabled predictive control for quadcopters,
E. Elokda, J. Coulson, P. N. Beuchat, J. Lygeros, and F. D ¨orfler, “Data- enabled predictive control for quadcopters,”International Journal of Robust and Nonlinear Control, vol. 31, no. 18, pp. 8916–8936, 2021
work page 2021
-
[23]
Toward a data-driven template model for quadrupedal locomotion,
R. T. Fawcett, K. Afsari, A. D. Ames, and K. A. Hamed, “Toward a data-driven template model for quadrupedal locomotion,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 7636–7643, 2022
work page 2022
-
[24]
Data-driven control for power oscillation damping: Robustness and closed-loop identification,
F. Braun, J. Poland, and M. Larsson, “Data-driven control for power oscillation damping: Robustness and closed-loop identification,” in2023 IEEE Belgrade PowerTech. IEEE, 2023, pp. 01–06
work page 2023
-
[25]
L. Huang, J. Zhen, J. Lygeros, and F. D ¨orfler, “Quadratic regularization of data-enabled predictive control: Theory and application to power converter experiments,”19th IFAC Symposium on System Identification, vol. 54, no. 7, pp. 192–197, 2021
work page 2021
-
[26]
Data-driven simulation and control,
I. Markovsky and P. Rapisarda, “Data-driven simulation and control,” International Journal of Control, vol. 81, no. 12, pp. 1946–1959, 2008
work page 1946
-
[27]
Identifiability in the behavioral setting,
I. Markovsky and F. D ¨orfler, “Identifiability in the behavioral setting,” 2020, available online
work page 2020
-
[28]
Handbook of linear data- driven predictive control: Theory, implementation and design,
P. C. N. Verheijen, V . Breschi, and M. Lazar, “Handbook of linear data- driven predictive control: Theory, implementation and design,”Annual Reviews in Control, vol. 56, p. 100914, 2023
work page 2023
-
[29]
Robust output-feedback mpc with integral action,
C. Løvaaset al., “Robust output-feedback mpc with integral action,” IEEE Trans. Autom. Control, vol. 55, no. 7, pp. 1531–1543, 2010
work page 2010
-
[30]
H. Xinet al., “How many grid-forming converters do we need? a perspective from small signal stability and power grid strength,”IEEE Trans. Power Syst., pp. 1–13, 2024
work page 2024
-
[31]
I. Cvetkovicet al., “Modeling of a virtual synchronous machine- based grid-interface converter for renewable energy systems integration,” in2014 IEEE 15th Workshop on Control and Modeling for Power Electronics (COMPEL). IEEE, 2014, pp. 1–7
work page 2014
-
[32]
Osqp: An operator splitting solver for quadratic programs., 2020, 12,
B. Stellato, G. Banjac, P. Goulart, A. Bemporad, and S. B. OSQP, “Osqp: An operator splitting solver for quadratic programs., 2020, 12,”Math. Program. Comput., vol. 12, pp. 1–36, 2020
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.