Remarks on stochastic cloning and delayed-state filtering
Pith reviewed 2026-05-18 20:00 UTC · model grok-4.3
The pith
A properly derived delayed-state Kalman filter yields the same state and covariance updates as stochastic cloning without state augmentation
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper demonstrates that a properly derived delayed-state Kalman filter produces exactly the same state estimate and covariance update as the stochastic cloning method for delayed-state measurements, without the need to augment the state vector with a cloned prior state.
What carries the argument
The generalized Kalman filter update equations modified to directly incorporate the cross-covariances between the current measurement and the prior state estimates
If this is right
- The two DSKF formulations achieve equivalent results to SC with comparable asymptotic complexity in computation and memory.
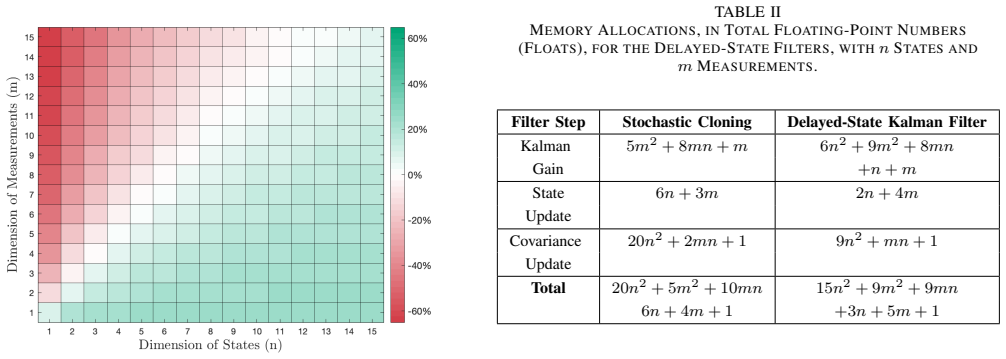
- One of the DSKF formulations may reduce arithmetic operations and storage for specific state dimensions.
- This equivalence applies directly to navigation and robotics problems involving odometry or similar delayed measurements.
- Kalman filter variants can handle correlated delayed-state measurements when formulated correctly.
Where Pith is reading between the lines
- Implementers could select the non-augmented DSKF to avoid managing extra state dimensions in high-dimensional problems.
- Numerical stability or conditioning differences between the two approaches may appear in floating-point implementations and merit direct testing.
- The correlation-handling technique shown here could be adapted to other recursive estimators beyond the Kalman filter.
Load-bearing premise
The correlations between the delayed-state measurement and prior state estimates can be exactly captured inside the standard (non-augmented) Kalman filter update equations when the filter is derived correctly.
What would settle it
Implement both a stochastic cloning filter and a correctly derived delayed-state Kalman filter on the same sequence of odometry measurements and check whether the resulting state estimates and covariance matrices match to machine precision.
Figures

read the original abstract
Many estimation problems in aerospace navigation and robotics involve measurements that depend on prior states. A prominent example is odometry, which measures the relative change between states over time. Accurately handling these delayed-state measurements requires capturing their correlations with prior state estimates, and a widely used approach is stochastic cloning (SC), which augments the state vector to account for these correlations. This work revisits a long-established but often overlooked alternative--the delayed-state Kalman filter--and demonstrates that a properly derived filter yields exactly the same state and covariance update as SC, without requiring state augmentation. Moreover, two equivalent formulations of the delayed-state Kalman filter (DSKF) are presented, providing complementary perspectives on how the prior-state measurement correlations can be handled within the generalized Kalman filter. These formulations are shown to be comparable to SC in asymptotic computational and memory complexity, while one DSKF formulation can offer reduced arithmetic and storage costs for certain problem dimensions. Our findings clarify a common misconception that Kalman filter variants are inherently unable to handle correlated delayed-state measurements, demonstrating that an alternative formulation achieves the same results without state augmentation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript revisits the delayed-state Kalman filter (DSKF) as an alternative to stochastic cloning (SC) for handling measurements depending on prior states (e.g., odometry). It claims that a properly derived DSKF produces identical posterior mean and covariance to SC in the linear-Gaussian case by directly incorporating the required cross-covariances into the standard (non-augmented) Kalman filter update equations. Two equivalent DSKF formulations are presented, shown to match SC, and compared for asymptotic computational and memory complexity, with one variant potentially offering reduced arithmetic and storage costs for certain dimensions.
Significance. If the derivations hold, the result is significant for state estimation in robotics and aerospace navigation. It clarifies that the generalized Kalman filter can exactly handle correlated delayed-state measurements without augmentation, countering a common misconception, and supplies two complementary formulations plus a complexity comparison. This could simplify implementations where state augmentation is undesirable while remaining grounded in standard Kalman algebra.
major comments (1)
- [§4.1] §4.1, Eq. (15): the cross-covariance term between the delayed measurement and the prior state estimate is introduced without an explicit first-principles derivation from the joint Gaussian assumption; this step is load-bearing for the claimed exact equivalence to SC.
minor comments (2)
- [Abstract] The linear-Gaussian assumption under which the exact equivalence holds should be stated more prominently in the abstract and introduction.
- [§5] §5: the complexity comparison would be strengthened by a small table listing operation counts for representative state dimensions (e.g., 6, 15, 30) rather than only asymptotic statements.
Simulated Author's Rebuttal
We thank the referee for their careful reading and recommendation for minor revision. The manuscript seeks to clarify the equivalence of the delayed-state Kalman filter to stochastic cloning for correlated delayed measurements. We address the single major comment below.
read point-by-point responses
-
Referee: [§4.1] §4.1, Eq. (15): the cross-covariance term between the delayed measurement and the prior state estimate is introduced without an explicit first-principles derivation from the joint Gaussian assumption; this step is load-bearing for the claimed exact equivalence to SC.
Authors: We agree that an explicit first-principles derivation of the cross-covariance in Eq. (15) from the joint Gaussian assumption would improve clarity. In the revised manuscript we will insert a short derivation that begins from the joint distribution of the delayed measurement and the prior state estimate. We will show how the cross-covariance arises directly from the linear measurement model, the shared process-noise history, and the standard Kalman prediction step, thereby confirming that the update matches the augmented stochastic-cloning equations without state augmentation. revision: yes
Circularity Check
No significant circularity
full rationale
The paper's central claim is a mathematical equivalence between a correctly derived delayed-state Kalman filter (DSKF) and stochastic cloning (SC) for handling correlated delayed-state measurements in the linear-Gaussian case. This rests on standard Kalman filter update equations that incorporate cross-covariances directly, without state augmentation. The derivation uses established KF algebra for correlated measurements and presents two equivalent DSKF formulations shown to match SC in updates and complexity. No steps reduce by construction to fitted parameters, self-definitions, or load-bearing self-citations; the result is self-contained against external benchmarks of Kalman filter theory.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Linear measurement model and additive Gaussian noise as in the generalized Kalman filter
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
a properly derived filter yields exactly the same state and covariance update as SC, without requiring state augmentation
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Galilean State Estimation for Inertial Navigation Systems with Unknown Time Delay
A Galilean-equivariant filter jointly estimates INS navigation states and unknown GNSS time delays, preserving accuracy and consistency better than EKF in UAV flights and simulations with delays up to 500 ms.
Reference graph
Works this paper leans on
-
[1]
D. Nist ´er, O. Naroditsky, and J. Bergen, “Visual odometry,” in IEEE Computer Society Conference on Computer Vision and Pattern Recog- nition (CVPR)., 2004
work page 2004
-
[2]
D. Scaramuzza and F. Fraundorfer, “Visual odometry,” IEEE Robotics and Automation Magazine , vol. 18, no. 4, pp. 80–92, 2011
work page 2011
-
[3]
LIO-SAM: Tightly-coupled lidar inertial odometry via smoothing and mapping,
T. Shan, B. Englot, D. Meyers, W. Wang, C. Ratti, and D. Rus, “LIO-SAM: Tightly-coupled lidar inertial odometry via smoothing and mapping,” in 2020 IEEE/RSJ international conference on intelligent robots and systems (IROS) . IEEE, 2020, pp. 5135–5142
work page 2020
-
[4]
W. Xu and F. Zhang, “FAST-LIO: A fast, robust LiDAR-inertial odom- etry package by tightly-coupled iterated Kalman filter,” IEEE Robotics and Automation Letters , vol. 6, no. 2, pp. 3317–3324, 2021
work page 2021
-
[5]
Position estimation for a mobile robot using vision and odometry
F. Chenavier and J. L. Crowley, “Position estimation for a mobile robot using vision and odometry.” in ICRA, vol. 89, 1992, pp. 2588–2593
work page 1992
-
[6]
Measurement and correction of systematic odometry errors in mobile robots,
J. Borenstein and L. Feng, “Measurement and correction of systematic odometry errors in mobile robots,” IEEE Transactions on robotics and automation, vol. 12, no. 6, pp. 869–880, 1996
work page 1996
-
[7]
Four-wheeled dead-reckoning model calibration using RTS smoothing,
A. Welte, P. Xu, and P. Bonnifait, “Four-wheeled dead-reckoning model calibration using RTS smoothing,” in 2019 International conference on robotics and automation (ICRA) . IEEE, 2019, pp. 312–318
work page 2019
-
[8]
Visual odometry for ground vehicle applications,
D. Nist ´er, O. Naroditsky, and J. Bergen, “Visual odometry for ground vehicle applications,” Journal of Field Robotics, vol. 23, no. 1, pp. 3–20, 2006
work page 2006
-
[9]
Visual-Inertial Odometry of Aerial Robots
D. Scaramuzza and Z. Zhang, “Visual-inertial odometry of aerial robots,” arXiv preprint arXiv:1906.03289 , 2019
work page internal anchor Pith review Pith/arXiv arXiv 1906
-
[10]
A survey on odometry for autonomous navigation systems,
S. A. Mohamed, M.-H. Haghbayan, T. Westerlund, J. Heikkonen, H. Tenhunen, and J. Plosila, “A survey on odometry for autonomous navigation systems,” IEEE access, vol. 7, pp. 97 466–97 486, 2019
work page 2019
-
[11]
Path following using visual odometry for a Mars rover in high-slip environments,
D. M. Helmick, Y . Cheng, D. S. Clouse, L. H. Matthies, and S. I. Roumeliotis, “Path following using visual odometry for a Mars rover in high-slip environments,” in 2004 IEEE Aerospace Conference Proceed- ings (IEEE Cat. No. 04TH8720) , vol. 2. IEEE, 2004, pp. 772–789
work page 2004
-
[12]
The Mars exploration rovers descent image motion estimation system,
Y . Cheng, J. Goguen, A. Johnson, C. Leger, L. Matthies, M. S. Martin, and R. Willson, “The Mars exploration rovers descent image motion estimation system,” IEEE Intelligent Systems , vol. 19, no. 3, pp. 13–21, 2004
work page 2004
-
[13]
Visual odometry on the Mars exploration rovers,
Y . Cheng, M. Maimone, and L. Matthies, “Visual odometry on the Mars exploration rovers,” in 2005 IEEE International Conference on Systems, Man and Cybernetics , vol. 1. IEEE, 2005, pp. 903–910
work page 2005
-
[14]
Image-based lunar terrain relative navigation without a map: Measure- ments,
J. A. Christian, L. Hong, P. McKee, R. Christensen, and T. P. Crain, “Image-based lunar terrain relative navigation without a map: Measure- ments,” Journal of Spacecraft and Rockets , vol. 58, no. 1, pp. 164–181, 2021
work page 2021
-
[15]
Vision-based navigation for the NASA Mars helicopter,
D. S. Bayard, D. T. Conway, R. Brockers, J. H. Delaune, L. H. Matthies, H. F. Grip, G. B. Merewether, T. L. Brown, and A. M. San Martin, “Vision-based navigation for the NASA Mars helicopter,” in AIAA SciTech Forum, 2019
work page 2019
-
[16]
Maybeck, Stochastic Models: Estimation and Control: Volume 2
P. Maybeck, Stochastic Models: Estimation and Control: Volume 2 . New York, NY: Academic Press, 1982
work page 1982
- [17]
-
[18]
R. G. Brown and P. Y . C. Hwang, Introduction to Random Signals and Applied Kalman Filtering , 3rd ed. John Wiley & Sons, 1997
work page 1997
-
[19]
A multi-state constraint Kalman filter for vision-aided inertial navigation,
A. I. Mourikis and S. I. Roumeliotis, “A multi-state constraint Kalman filter for vision-aided inertial navigation,” in Proceedings 2007 IEEE international conference on robotics and automation . IEEE, 2007, pp. 3565–3572
work page 2007
-
[20]
Solutions to the linear smoothing problem,
H. Rauch, “Solutions to the linear smoothing problem,” IEEE Transac- tions on Automatic Control , vol. 8, no. 4, pp. 371–372, 1963
work page 1963
-
[21]
A fixed-lag smoothing solution to out-of-sequence information fusion problems,
S. Challa, R. J. Evans, X. Wang, and J. Legg, “A fixed-lag smoothing solution to out-of-sequence information fusion problems,” Communica- tions in Information and Systems , vol. 2, no. 4, pp. 325–348, 2002
work page 2002
-
[22]
Fast 3D pose estimation with out-of-sequence measurements,
A. Ranganathan, M. Kaess, and F. Dellaert, “Fast 3D pose estimation with out-of-sequence measurements,” in 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems . IEEE, 2007, pp. 2486– 2493
work page 2007
-
[23]
On-manifold preintegration for real-time visual-inertial odometry,
C. Forster, L. Carlone, F. Dellaert, and D. Scaramuzza, “On-manifold preintegration for real-time visual-inertial odometry,”IEEE Transactions on Robotics, vol. 33, no. 1, 2017
work page 2017
-
[24]
Kalman filter with delayed states as observables,
R. Brown and G. Hartman, “Kalman filter with delayed states as observables,” in Proceedings of the National Electronics Conference , vol. 24, 1968, pp. 67–72
work page 1968
-
[25]
Smoothing for delayed state model with applications to aided inertial navigation systems,
R. B. Finch, “Smoothing for delayed state model with applications to aided inertial navigation systems,” Ph.D. dissertation, Iowa State University, Ames, Iowa, 1970
work page 1970
-
[26]
Proper treatment of the delta-range measurement in an integrated GPS/inertial system,
R. G. Brown and P. W. McBurney, “Proper treatment of the delta-range measurement in an integrated GPS/inertial system,” in Proceedings of the 1987 National Technical Meeting of The Institute of Navigation , 1987, pp. 32–39
work page 1987
-
[27]
E. D. Kaplan and C. Hegarty, Understanding GPS/GNSS: Principles and applications. Artech house, 2017
work page 2017
-
[28]
Using TDCP measurements in a low-cost PPP-IMU hybridized filter for real-time applications,
A. Guillard, P. Thevenon, and C. Milner, “Using TDCP measurements in a low-cost PPP-IMU hybridized filter for real-time applications,” in Proceedings of the 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022) , 2022, pp. 2090–2103
work page 2022
-
[29]
Stochastic cloning: A general- ized framework for processing relative state measurements,
S. I. Roumeliotis and J. W. Burdick, “Stochastic cloning: A general- ized framework for processing relative state measurements,” in IEEE International Conference on Robotics and Automation , 2002
work page 2002
-
[30]
Implementation of a Map Relative Localization System for Planetary Landing,
A. E. Johnson, Y . Cheng, N. Trawny, J. F. Montgomery, S. Schroeder, J. Chang, D. Clouse, S. Aaron, and S. Mohan, “Implementation of a Map Relative Localization System for Planetary Landing,” Journal of Guidance, Control, and Dynamics , vol. 46, pp. 618–637, 2023
work page 2023
-
[31]
K.-W. Chiang, Y .-H. Li, L.-T. Hsu, and F.-Y . Chu, “The design a TDCP- smoothed GNSS/odometer integration scheme with vehicular-motion constraint and robust regression,” Remote Sensing , vol. 12, no. 16, p. 2550, 2020
work page 2020
-
[32]
Terrestrial GPS time- differenced carrier-phase positioning of lunar surface users,
K. Iiyama, S. Bhamidipati, and G. Gao, “Terrestrial GPS time- differenced carrier-phase positioning of lunar surface users,” in 2023 IEEE Aerospace Conference. IEEE, 2023, pp. 1–9
work page 2023
-
[33]
T. Oskiper, M. Sizintsev, V . Branzoi, S. Samarasekera, and R. Kumar, “Augmented reality binoculars,” IEEE transactions on visualization and computer graphics, vol. 21, no. 5, pp. 611–623, 2015
work page 2015
-
[34]
A novel finite state ma- chine based step detection technique for pedestrian navigation systems,
J. Ruppelt, N. Kronenwett, and G. F. Trommer, “A novel finite state ma- chine based step detection technique for pedestrian navigation systems,” in 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN). IEEE, 2015, pp. 1–7
work page 2015
-
[35]
An intuitive mobility aid for visually impaired people based on stereo vision,
T. Schwarze, M. Lauer, M. Schwaab, M. Romanovas, S. Bohm, and T. Jurgensohn, “An intuitive mobility aid for visually impaired people based on stereo vision,” in Proceedings of the IEEE International Conference on Computer Vision Workshops , 2015, pp. 17–25
work page 2015
-
[36]
A. Gopalakrishnan, N. S. Kaisare, and S. Narasimhan, “Incorporating delayed and infrequent measurements in extended Kalman filter based nonlinear state estimation,” Journal of Process Control , vol. 21, no. 1, pp. 119–129, 2011
work page 2011
-
[37]
A. I. Mourikis, S. I. Roumeliotis, and J. W. Burdick, “Sc-kf mobile robot localization: A stochastic cloning kalman filter for processing relative- state measurements,” IEEE Transactions on Robotics, vol. 23, no. 4, pp. 717–730, 2007
work page 2007
-
[38]
Q. Liang, Y . Sun, L. Wang, and M. Liu, “A novel inertial-aided visible light positioning system using modulated LEDs and unmodulated lights as landmarks,” IEEE Transactions on Automation Science and Engineering, vol. 19, no. 4, pp. 3049–3067, 2021
work page 2021
-
[39]
Sigma-point Kalman filters for integrated navigation,
R. v. d. Merwe and E. A. Wan, “Sigma-point Kalman filters for integrated navigation,” in Proceedings of the 60th annual meeting of the institute of navigation (2004) , 2004, pp. 641–654
work page 2004
-
[40]
AS-EKF: A delay aware state estimation technique for telepresence robot navigation,
B. Das, G. Dobie, and S. G. Pierce, “AS-EKF: A delay aware state estimation technique for telepresence robot navigation,” in 2019 Third IEEE International Conference on Robotic Computing (IRC) . IEEE, 2019, pp. 624–629
work page 2019
-
[41]
Reduced-order Kalman filtering with relative measure- ments,
D. S. Bayard, “Reduced-order Kalman filtering with relative measure- ments,” Journal of guidance, control, and dynamics , vol. 32, no. 2, pp. 679–686, 2009
work page 2009
-
[42]
Incorpo- ration of time delayed measurements in a discrete-time Kalman filter,
T. D. Larsen, N. A. Andersen, O. Ravn, and N. K. Poulsen, “Incorpo- ration of time delayed measurements in a discrete-time Kalman filter,” in Proceedings of the 37th IEEE Conference on Decision and Control (Cat. No. 98CH36171) , vol. 4. IEEE, 1998, pp. 3972–3977
work page 1998
-
[43]
Optical navigation for lunar landing based on convolutional neural network crater detector,
S. Silvestrini, M. Piccinin, G. Zanotti, A. Brandonisio, I. Bloise, L. Fer- uglio, P. Lunghi, M. Lavagna, and M. Varile, “Optical navigation for lunar landing based on convolutional neural network crater detector,” Aerospace Science and Technology , vol. 123, p. 107503, 2022
work page 2022
-
[44]
Navigation filter best practices,
J. R. Carpenter and C. N. D’Souza, “Navigation filter best practices,” NASA Engineering and Safety Center, Tech. Rep., Apr. 2018. [Online]. Available: https://ntrs.nasa.gov/api/citations/ 20180003657/downloads/20180003657.pdf
-
[45]
Hajek, Random Processes for Engineers
B. Hajek, Random Processes for Engineers . Cambridge University Press, 2015
work page 2015
-
[46]
Farebrother, The Gauss and Gauss-Jordan Methods , ser
R. Farebrother, The Gauss and Gauss-Jordan Methods , ser. Statistics: Textbooks and Monographs. Marcel Dekker, Inc., 1988, vol. 91, ch. 1, p. 12
work page 1988
-
[47]
P. Deuflhard and A. Hohmann, Numerical Analysis: A First Course in Scientific Computation. Berlin, NY , USA: Walter de Gruyter, 1995. IX. B IOGRAPHY SECTION Tara Mina is a research engineer at Georgia Tech in the Space Exploration Analysis Laboratory. She received her Ph.D. in the Electrical Engineering Department from Stanford University in 2023. In her ...
work page 1995
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.