Robust Real-Time Coordination of CAVs: A Distributed Optimization Framework under Uncertainty
Pith reviewed 2026-05-18 21:05 UTC · model grok-4.3
The pith
A distributed optimization method coordinates connected autonomous vehicles by directly managing trajectory distributions under uncertainty to cut collision rates while running in real time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
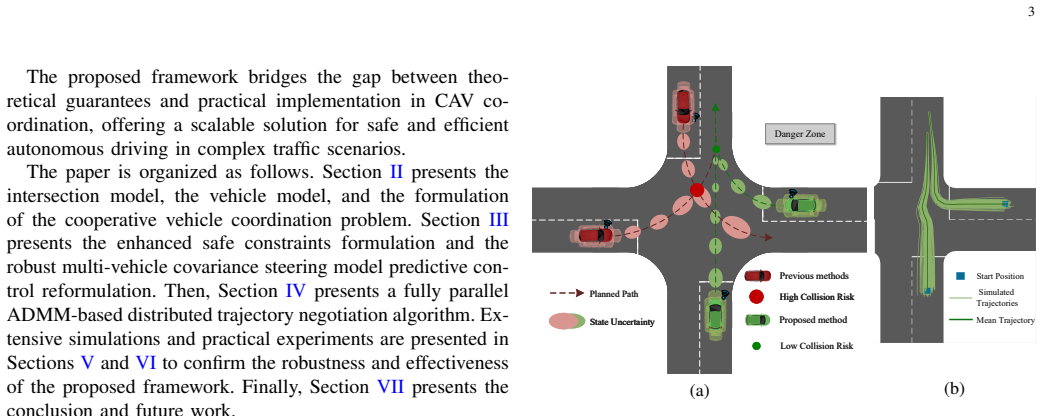
By formulating robust cooperative planning as direct control of vehicles' trajectory distributions subject to adaptive enhanced safety constraints that enforce a specified safety level on interactive trajectory uncertainty, and solving it with a fully parallel ADMM-DTN distributed negotiation algorithm that supports configurable rounds plus an interactive attention mechanism to limit computation to critical participants, the framework achieves lower collision rates, real-time execution, and strong scaling with vehicle numbers.
What carries the argument
Adaptive enhanced safety constraints applied directly to trajectory distributions, which encode uncertainty in interactive behavior and enforce the target safety level without separate post-processing.
If this is right
- The configurable negotiation rounds in the ADMM-DTN algorithm allow explicit trade-offs between solution quality and per-vehicle computation time.
- The attention mechanism reduces overall computational demand by approximately 15 percent while preserving the safety guarantees.
- The approach continues to deliver real-time performance and safety as the number of participating vehicles increases.
- Real-world validation with unexpected dynamic obstacles shows the framework handles disturbances outside the modeled uncertainty.
Where Pith is reading between the lines
- The same distribution-control idea could be tested on other multi-agent coordination tasks that involve prediction uncertainty, such as drone fleets or warehouse robots.
- Replacing the attention mechanism with learned focus policies might further improve scaling in very large vehicle groups.
- The framework's emphasis on parallel negotiation suggests it could integrate with existing vehicle-to-vehicle communication standards without central infrastructure.
Load-bearing premise
The adaptive enhanced safety constraints on trajectory distributions maintain the claimed safety level against interactive uncertainty without any tuning that would reduce the reported collision reductions.
What would settle it
A set of high-uncertainty multi-vehicle simulations or real-world tests in which the observed collision rate reduction falls well below the reported 40 percent range, or in which safety violations occur at the claimed constraint level, would falsify the central claim.
Figures











read the original abstract
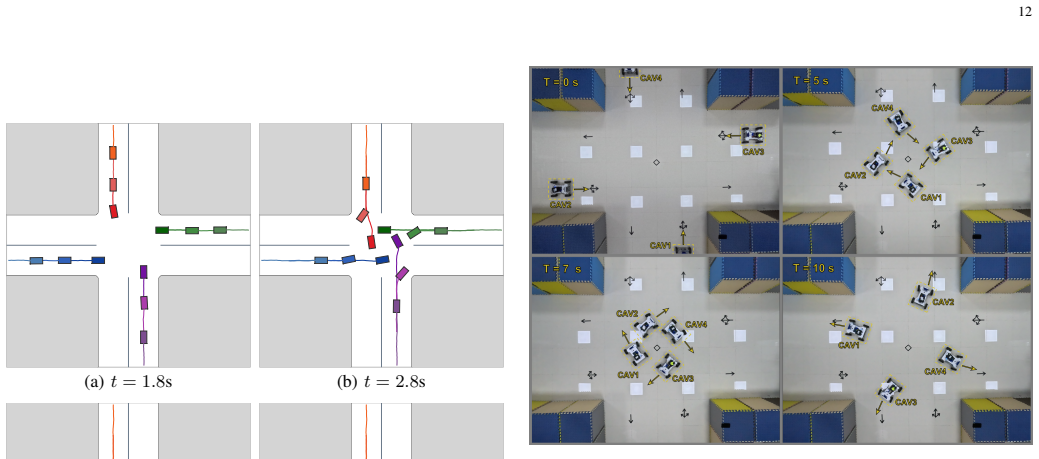
Achieving both safety guarantees and real-time performance in cooperative vehicle coordination remains a fundamental challenge, particularly in dynamic and uncertain environments. Existing methods often suffer from insufficient uncertainty treatment in safety modeling, which intertwines with the heavy computational burden under complex multi-vehicle coupling. This paper presents a novel coordination framework that resolves this challenge through three key innovations: 1) direct control of vehicles' trajectory distributions during coordination, formulated as a robust cooperative planning problem with adaptive enhanced safety constraints, ensuring a specified level of safety regarding the uncertainty of the interactive trajectory, 2) a fully parallel ADMM-based distributed trajectory negotiation (ADMM-DTN) algorithm that efficiently solves the optimization problem while allowing configurable negotiation rounds to balance solution quality and computational resources, and 3) an interactive attention mechanism that selectively focuses on critical interactive participants to further enhance computational efficiency. Simulation results demonstrate that our framework achieves significant advantages in safety (reducing collision rates by up to 40.79\% in various scenarios) and real-time performance compared to representative benchmarks, while maintaining strong scalability with increasing vehicle numbers. The proposed interactive attention mechanism further reduces the computational demand by 15.4\%. Real-world experiments further validate robustness and real-time feasibility with unexpected dynamic obstacles, demonstrating reliable coordination in complex traffic scenes. The experiment demo could be found at https://youtu.be/4PZwBnCsb6Q.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a distributed optimization framework for real-time coordination of connected autonomous vehicles (CAVs) under uncertainty. It introduces direct control of trajectory distributions via a robust cooperative planning problem with adaptive enhanced safety constraints, a fully parallel ADMM-based distributed trajectory negotiation (ADMM-DTN) algorithm with configurable negotiation rounds, and an interactive attention mechanism to reduce computational load by focusing on critical participants. Simulations report up to 40.79% collision rate reductions and 15.4% computational savings versus benchmarks, with strong scalability; real-world experiments validate robustness to dynamic obstacles.
Significance. If the central safety claims hold without implicit calibration, the work would offer a practical advance in uncertainty-aware multi-agent planning for CAVs, combining distributed solving with attention-based efficiency. The explicit handling of trajectory distributions and real-world validation strengthen applicability to dynamic traffic, while the ADMM-DTN provides a reproducible algorithmic contribution for balancing quality and compute.
major comments (2)
- [§3.2–3.3] §3.2–3.3 (Adaptive Enhanced Safety Constraints): The claim that the adaptive constraints applied to trajectory distributions ensure a specified safety level regarding interactive uncertainty without post-hoc tuning is load-bearing for the 40.79% collision reduction and robustness assertions. The formulation leaves unclear whether the adaptation rule (e.g., any thresholds or scaling factors in the enhanced constraints) is strictly determined by the uncertainty model or contains free parameters whose values are selected to match observed performance; if the latter, the reported gains may partly reflect scenario-specific calibration rather than intrinsic properties of the ADMM-DTN solver.
- [§4.1] §4.1 (ADMM-DTN Algorithm): The configurable number of negotiation rounds is listed as a free parameter; the paper should explicitly demonstrate that solution quality and safety guarantees remain stable across a range of round counts without retuning the safety constraints, to support the scalability claims under increasing vehicle numbers.
minor comments (2)
- [Abstract and §5] The abstract and results sections would benefit from explicit reporting of error bars, number of Monte Carlo trials, and data exclusion criteria for the collision rate statistics to allow verification of the quantitative gains.
- [§3 and §5] Notation for the trajectory distribution parameters and the attention weights should be unified between the method and experimental sections to improve readability.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive comments, which help us improve the clarity and rigor of the manuscript. We address each major comment point by point below, providing clarifications based on the existing formulation and indicating revisions where they strengthen the presentation without altering the core claims.
read point-by-point responses
-
Referee: [§3.2–3.3] §3.2–3.3 (Adaptive Enhanced Safety Constraints): The claim that the adaptive constraints applied to trajectory distributions ensure a specified safety level regarding interactive uncertainty without post-hoc tuning is load-bearing for the 40.79% collision reduction and robustness assertions. The formulation leaves unclear whether the adaptation rule (e.g., any thresholds or scaling factors in the enhanced constraints) is strictly determined by the uncertainty model or contains free parameters whose values are selected to match observed performance; if the latter, the reported gains may partly reflect scenario-specific calibration rather than intrinsic properties of the ADMM-DTN solver.
Authors: We appreciate the referee drawing attention to this central aspect of the safety formulation. In Sections 3.2 and 3.3, the adaptive enhanced safety constraints are constructed directly from the uncertainty model: the thresholds and scaling factors are computed from the probabilistic bounds, means, and covariances of the predicted interactive trajectory distributions. No additional free parameters are introduced for performance matching or post-hoc calibration; the specified safety level follows from the robust optimization problem by construction. To remove any potential ambiguity in the original presentation, we have added an explicit step-by-step derivation of the adaptation rule in the revised Section 3.2 together with a statement confirming that all quantities are determined solely by the uncertainty model. This revision supports that the reported collision reductions derive from the framework rather than scenario-specific tuning. revision: yes
-
Referee: [§4.1] §4.1 (ADMM-DTN Algorithm): The configurable number of negotiation rounds is listed as a free parameter; the paper should explicitly demonstrate that solution quality and safety guarantees remain stable across a range of round counts without retuning the safety constraints, to support the scalability claims under increasing vehicle numbers.
Authors: We agree that explicit demonstration of stability with respect to the number of negotiation rounds strengthens the scalability claims. While the original manuscript reported results for a representative setting, the revised version now includes additional experiments in Section 4.1 that vary the negotiation rounds from 3 to 15 across multiple vehicle densities. These results show that collision rates and solution quality remain consistent without any modification to the safety constraints. A short convergence analysis has also been added to explain the observed stability. This addition directly addresses the concern and bolsters the evidence for reliable performance under varying computational budgets. revision: yes
Circularity Check
No significant circularity; claims rest on external simulation and experiment outcomes
full rationale
The paper describes a coordination framework using adaptive enhanced safety constraints on trajectory distributions, an ADMM-DTN solver, and an interactive attention mechanism. Safety reductions (up to 40.79%) and compute savings (15.4%) are presented as measured results from simulations across scenarios and real-world experiments with dynamic obstacles, rather than quantities defined or fitted inside the same equations. No derivation steps, equations, or self-citations are exhibited that reduce a central prediction to its own inputs by construction; the performance numbers function as independent benchmarks of the proposed algorithms.
Axiom & Free-Parameter Ledger
free parameters (1)
- number of negotiation rounds
axioms (1)
- standard math ADMM converges under the convexity and constraint qualification conditions assumed for the robust planning problem
Reference graph
Works this paper leans on
-
[1]
Research advances and challenges of autonomous and connected ground vehicles,
A. Eskandarian, C. Wu, and C. Sun, “Research advances and challenges of autonomous and connected ground vehicles,” IEEE Transactions on Intelligent Transportation Systems, vol. 22, no. 2, pp. 683–711, 2019
work page 2019
-
[2]
A survey on cyber-security of connected and autonomous vehicles (CA Vs),
X. Sun, F. R. Yu, and P. Zhang, “A survey on cyber-security of connected and autonomous vehicles (CA Vs),” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 7, pp. 6240–6259, 2021
work page 2021
-
[3]
Evolutionary V2X technologies toward the internet of vehicles: Challenges and opportunities,
H. Zhou, W. Xu, J. Chen, and W. Wang, “Evolutionary V2X technologies toward the internet of vehicles: Challenges and opportunities,” Proceed- ings of the IEEE , vol. 108, no. 2, pp. 308–323, 2020
work page 2020
-
[4]
A survey on intersection management of connected autonomous vehicles,
M. Khayatian, M. Mehrabian, E. Andert, R. Dedinsky, S. Choudhary, Y . Lou, and A. Shirvastava, “A survey on intersection management of connected autonomous vehicles,” ACM Transactions on Cyber-Physical Systems, vol. 4, no. 4, pp. 1–27, 2020
work page 2020
-
[5]
J. Rios-Torres and A. A. Malikopoulos, “A survey on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps,” IEEE Transactions on Intelligent Transportation Systems, vol. 18, no. 5, pp. 1066–1077, 2016
work page 2016
-
[6]
R. Hult, G. R. Campos, E. Steinmetz, L. Hammarstrand, P. Falcone, and H. Wymeersch, “Coordination of cooperative autonomous vehicles: Toward safer and more efficient road transportation,” IEEE Signal Processing Magazine, vol. 33, no. 6, pp. 74–84, 2016
work page 2016
-
[7]
A survey on cooperative longitudinal motion control of multiple connected and automated vehicles,
Z. Wang, Y . Bian, S. E. Shladover, G. Wu, S. E. Li, and M. J. Barth, “A survey on cooperative longitudinal motion control of multiple connected and automated vehicles,” IEEE Intelligent Transportation Systems Magazine, vol. 12, no. 1, pp. 4–24, 2019
work page 2019
-
[8]
Analysis of cooperative driving strategies for nonsignalized intersections,
Y . Meng, L. Li, F.-Y . Wang, K. Li, and Z. Li, “Analysis of cooperative driving strategies for nonsignalized intersections,” IEEE Transactions on Vehicular Technology, vol. 67, no. 4, pp. 2900–2911, 2017
work page 2017
-
[9]
J. Knaup, K. Okamoto, and P. Tsiotras, “Safe high-performance au- tonomous off-road driving using covariance steering stochastic model predictive control,” IEEE Transactions on Control Systems Technology , vol. 31, no. 5, pp. 2066–2081, 2023
work page 2066
-
[10]
T. Li, H. Zhang, Z. Gao, Q. Chen, and X. Niu, “High-accuracy positioning in urban environments using single-frequency multi-GNSS RTK/MEMS-IMU integration,” Remote sensing, vol. 10, no. 2, p. 205, 2018
work page 2018
-
[11]
J. Barra, S. Lesecq, M. Zarudniev, O. Debicki, N. Mareau, and L. Ou- vry, “Localization system in gps-denied environments using radar and imu measurements: Application to a smart white cane,” in 2019 18th European Control Conference (ECC) , 2019, pp. 1201–1206
work page 2019
-
[12]
Optimal stochastic vehicle path planning using covariance steering,
K. Okamoto and P. Tsiotras, “Optimal stochastic vehicle path planning using covariance steering,” IEEE Robotics and Automation Letters , vol. 4, no. 3, pp. 2276–2281, 2019
work page 2019
-
[13]
A review of motion planning for highway autonomous driving,
L. Claussmann, M. Revilloud, D. Gruyer, and S. Glaser, “A review of motion planning for highway autonomous driving,” IEEE Transactions on Intelligent Transportation Systems , vol. 21, no. 5, pp. 1826–1848, 2019
work page 2019
-
[14]
Y . Guan, Y . Ren, S. E. Li, Q. Sun, L. Luo, and K. Li, “Centralized cooperation for connected and automated vehicles at intersections by proximal policy optimization,” IEEE Transactions on Vehicular Tech- nology, vol. 69, no. 11, pp. 12 597–12 608, 2020
work page 2020
-
[15]
Real- time cooperative vehicle coordination at unsignalized road intersections,
J. Luo, T. Zhang, R. Hao, D. Li, C. Chen, Z. Na, and Q. Zhang, “Real- time cooperative vehicle coordination at unsignalized road intersections,” IEEE Transactions on Intelligent Transportation Systems , 2023
work page 2023
-
[16]
Deep multi-agent reinforcement learning for highway on-ramp merging in mixed traffic,
D. Chen, M. R. Hajidavalloo, Z. Li, K. Chen, Y . Wang, L. Jiang, and Y . Wang, “Deep multi-agent reinforcement learning for highway on-ramp merging in mixed traffic,” IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 11, pp. 11 623–11 638, 2023
work page 2023
-
[17]
C. Shao, F. Cheng, J. Xiao, and K. Zhang, “Vehicular intelligent collab- orative intersection driving decision algorithm in internet of vehicles,” Future Generation Computer Systems , vol. 145, pp. 384–395, 2023
work page 2023
-
[18]
A computationally efficient bi-level coordination framework for cavs at unsignalized intersections,
J. Luo, T. Zhang, and Q. Zhang, “A computationally efficient bi-level coordination framework for cavs at unsignalized intersections,” IEEE Transactions on Vehicular Technology, 2023
work page 2023
-
[19]
Optimal time trajectory and coordination for connected and automated vehicles,
A. A. Malikopoulos, L. Beaver, and I. V . Chremos, “Optimal time trajectory and coordination for connected and automated vehicles,” Automatica, vol. 125, p. 109469, 2021
work page 2021
-
[20]
A grouping-based cooperative driving strategy for cavs merging problems,
H. Xu, S. Feng, Y . Zhang, and L. Li, “A grouping-based cooperative driving strategy for cavs merging problems,” IEEE Transactions on Vehicular Technology, vol. 68, no. 6, pp. 6125–6136, 2019
work page 2019
-
[21]
Context-aware timely status updates for trajectory control with limited communication resources,
H. Bai, H. Li, W. Dou, and Y . Wang, “Context-aware timely status updates for trajectory control with limited communication resources,” in 2023 IEEE 97th Vehicular Technology Conference (VTC2023-Spring), 2023, pp. 1–6
work page 2023
-
[22]
A cooperative driving strategy for merging at on-ramps based on dynamic programming,
H. Pei, S. Feng, Y . Zhang, and D. Yao, “A cooperative driving strategy for merging at on-ramps based on dynamic programming,” IEEE Trans- actions on Vehicular Technology , vol. 68, no. 12, pp. 11 646–11 656, 2019
work page 2019
-
[23]
A hierarchical robust control strategy for decentralized signal-free intersec- tion management,
X. Pan, B. Chen, L. Dai, S. Timotheou, and S. A. Evangelou, “A hierarchical robust control strategy for decentralized signal-free intersec- tion management,” IEEE Transactions on Control Systems Technology , vol. 31, no. 5, pp. 2011–2026, 2023. 14
work page 2011
-
[24]
Autonomous intersection crossing with vehicle location uncertainty,
C. Vitale, P. Kolios, and G. Ellinas, “Autonomous intersection crossing with vehicle location uncertainty,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 10, pp. 17 546–17 561, 2022
work page 2022
-
[25]
C. Vitale, P. Kolios, and G. Ellinas, “Optimizing vehicle re-ordering events in coordinated autonomous intersection crossings under cavs’ location uncertainty,” IEEE Transactions on Intelligent Vehicles , vol. 8, no. 5, pp. 3473–3488, 2022
work page 2022
-
[26]
Distributed motion coordination using convex feasible set based model predictive control,
H. Zhou and C. Liu, “Distributed motion coordination using convex feasible set based model predictive control,” in 2021 IEEE International Conference on Robotics and Automation (ICRA) . IEEE, 2021, pp. 8330–8336
work page 2021
-
[27]
Re-planning optimization of cooperative vehicle coordination at road intersections,
C. Chen, J. Luo, T. Liang, and T. Zhang, “Re-planning optimization of cooperative vehicle coordination at road intersections,” in 2022 IEEE 95th Vehicular Technology Conference:(VTC2022-Spring), 2022, pp. 1– 6
work page 2022
-
[28]
A tightly coupled bi-level coordination framework for cavs at road intersections,
D. Li, T. Zhang, J. Luo, T. Liang, B. Cao, X. Wu, and Q. Zhang, “A tightly coupled bi-level coordination framework for cavs at road intersections,” IEEE Transactions on Intelligent Transportation Systems, 2024
work page 2024
-
[29]
S. Boyd, N. Parikh, E. Chu, B. Peleato, J. Eckstein et al., “Distributed optimization and statistical learning via the alternating direction method of multipliers,” Foundations and Trends® in Machine learning , vol. 3, no. 1, pp. 1–122, 2011
work page 2011
-
[30]
A survey of distributed optimization,
T. Yang, X. Yi, J. Wu, Y . Yuan, D. Wu, Z. Meng, Y . Hong, H. Wang, Z. Lin, and K. H. Johansson, “A survey of distributed optimization,” Annual Reviews in Control , vol. 47, pp. 278–305, 2019
work page 2019
-
[31]
Distributed differential dynamic programming architectures for large-scale multia- gent control,
A. D. Saravanos, Y . Aoyama, H. Zhu, and E. A. Theodorou, “Distributed differential dynamic programming architectures for large-scale multia- gent control,” IEEE Transactions on Robotics , 2023
work page 2023
-
[32]
X. Zhang, Z. Cheng, J. Ma, S. Huang, F. L. Lewis, and T. H. Lee, “Semi- definite relaxation-based ADMM for cooperative planning and control of connected autonomous vehicles,” IEEE transactions on intelligent transportation systems, vol. 23, no. 7, pp. 9240–9251, 2021
work page 2021
-
[33]
Z. Cheng, J. Ma, W. Wang, Z. Zhu, C. W. de Silva, and T. H. Lee, “Al- ternating direction method of multipliers-based parallel optimization for multi-agent collision-free model predictive control,” IEEE Transactions on Artificial Intelligence , 2024
work page 2024
-
[34]
Z. Huang, S. Shen, and J. Ma, “Decentralized iLQR for cooperative trajectory planning of connected autonomous vehicles via dual consensus admm,” IEEE Transactions on Intelligent Transportation Systems, 2023
work page 2023
-
[35]
Numerically stable dynamic bicycle model for discrete-time control,
Q. Ge, Q. Sun, S. E. Li, S. Zheng, W. Wu, and X. Chen, “Numerically stable dynamic bicycle model for discrete-time control,” in 2021 IEEE Intelligent Vehicles Symposium Workshops (IV Workshops). IEEE, 2021, pp. 128–134
work page 2021
-
[36]
CS-BRM: A probabilistic roadmap for consistent belief space planning with reachability guarantees,
D. Zheng, J. Ridderhof, Z. Zhang, P. Tsiotras, and A.-A. Agha- Mohammadi, “CS-BRM: A probabilistic roadmap for consistent belief space planning with reachability guarantees,” IEEE Transactions on Robotics, 2024
work page 2024
-
[37]
Chance-constrained collision avoidance for mavs in dynamic environments,
H. Zhu and J. Alonso-Mora, “Chance-constrained collision avoidance for mavs in dynamic environments,” IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 776–783, 2019
work page 2019
-
[38]
Chance-constrained optimal path planning with obstacles,
L. Blackmore, M. Ono, and B. C. Williams, “Chance-constrained optimal path planning with obstacles,” IEEE Transactions on Robotics , vol. 27, no. 6, pp. 1080–1094, 2011
work page 2011
-
[39]
A. E. Bryson, Applied optimal control: optimization, estimation and control. Routledge, 2018
work page 2018
-
[40]
K. J. ˚Astr¨om, Introduction to stochastic control theory . Courier Corporation, 2012
work page 2012
-
[41]
Chance constrained covari- ance control for linear stochastic systems with output feedback,
J. Ridderhof, K. Okamoto, and P. Tsiotras, “Chance constrained covari- ance control for linear stochastic systems with output feedback,” in 2020 59th IEEE Conference on Decision and Control (CDC) . IEEE, 2020, pp. 1758–1763
work page 2020
-
[42]
Steering state statistics with output feedback,
Y . Chen, T. Georgiou, and M. Pavon, “Steering state statistics with output feedback,” in 2015 54th IEEE Conference on Decision and Control (CDC). IEEE, 2015, pp. 6502–6507
work page 2015
-
[43]
Optimal covariance steering for discrete-time linear stochastic systems,
F. Liu, G. Rapakoulias, and P. Tsiotras, “Optimal covariance steering for discrete-time linear stochastic systems,” IEEE Transactions on Automatic Control, 2024
work page 2024
-
[44]
M. D. Doan, M. Diehl, T. Keviczky, and B. De Schutter, “A jacobi de- composition algorithm for distributed convex optimization in distributed model predictive control,” IFAC-PapersOnLine, vol. 50, no. 1, pp. 4905– 4911, 2017
work page 2017
-
[45]
M. Kneissl, A. Molin, H. Esen, and S. Hirche, “A one-step feasible negotiation algorithm for distributed trajectory generation of autonomous vehicles,” in 2019 ieee 58th conference on decision and control (CDC) . IEEE, 2019, pp. 6687–6693
work page 2019
-
[46]
Social attention for autonomous decision- making in dense traffic,
E. Leurent and J. Mercat, “Social attention for autonomous decision- making in dense traffic,” CoRR, abs/1911.12250, 2019
-
[47]
Ericson, Real-time collision detection
C. Ericson, Real-time collision detection . Crc Press, 2004
work page 2004
-
[48]
J. Bayer and J. Faigl, “On autonomous spatial exploration with small hexapod walking robot using tracking camera intel realsense t265,” in 2019 European Conference on Mobile Robots (ECMR) . IEEE, 2019, pp. 1–6. APPENDIX BICYCLE MODEL AND DYNAMICS LINEARIZATION AND DISCRETION Based on the bicycle model, the deterministic vehicle dy- namic of CA Vs follows ...
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.