Vibration Damping in Underactuated Cable-suspended Artwork -- Flying Belt Motion Control
Pith reviewed 2026-05-18 19:44 UTC · model grok-4.3
The pith
Input shaping cast as convex optimization suppresses vibrations in suspended belt artwork.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
A detailed mathematical model of the flying belt system was developed to capture its dynamic behavior. An input shaping method formulated as a convex optimization problem was then implemented to suppress the system's torsional and pendulum-like vibrations, enabling smoother and faster belt movements. Experimental results show substantial improvements in system performance and audience interaction.
What carries the argument
Input shaping method formulated as a convex optimization problem, which designs motor command profiles that cancel the natural oscillatory modes of the underactuated cable-suspended belts.
If this is right
- Higher rotational speeds become feasible without inducing disruptive oscillations.
- The belts respond more quickly to visitor movements tracked by the vision system.
- Overall system performance improves, leading to more responsive interactive experiences.
- The same formulation offers a template for vibration damping in other underactuated cable-driven mechanisms.
Where Pith is reading between the lines
- The convex-optimization approach could transfer to vibration control in cable-suspended cameras or construction cranes.
- Combining the model with online parameter updates might allow the system to adapt when belt lengths or loads change during an exhibition.
- Similar shaping techniques might reduce energy use by avoiding repeated corrective motor actions after each oscillation cycle.
Load-bearing premise
A detailed mathematical model accurately captures the dynamic behavior of the flying belt system.
What would settle it
Compare vibration amplitude and settling time at high speeds with and without the optimized input shaping; if the vibrations remain unchanged, the central claim fails.
Figures









read the original abstract
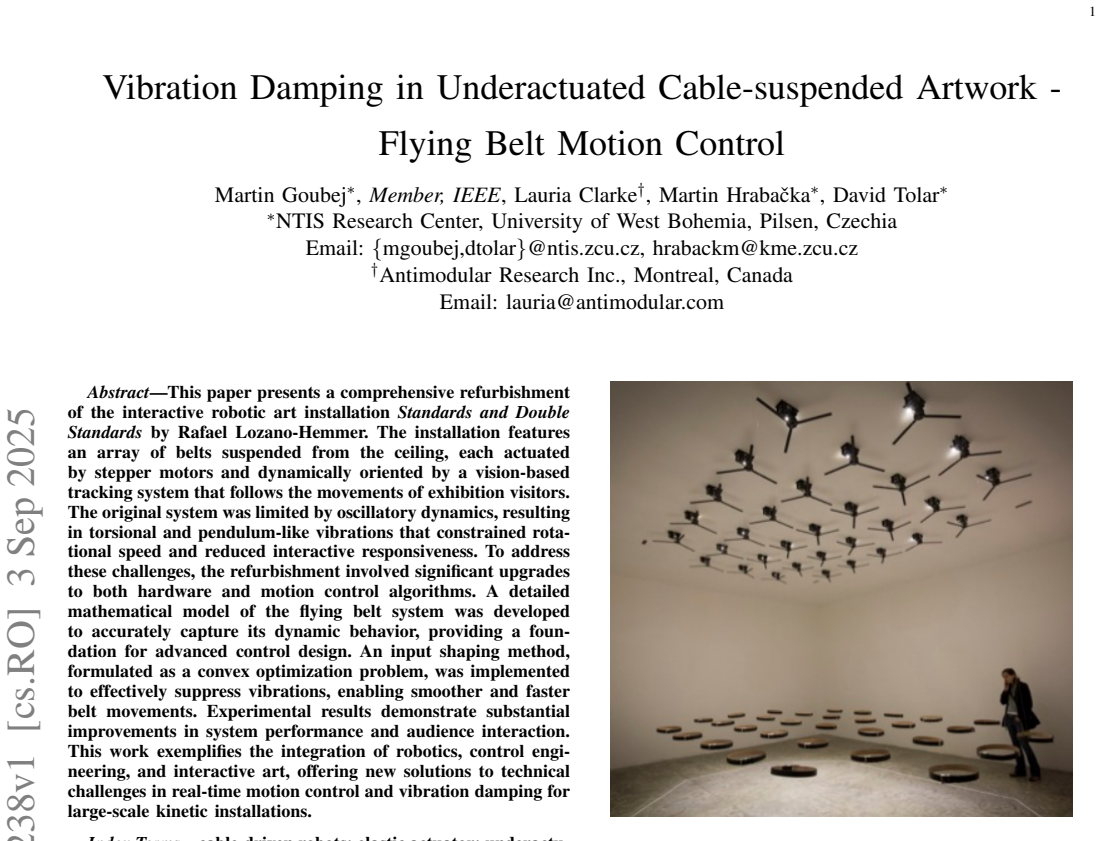
This paper presents a comprehensive refurbishment of the interactive robotic art installation Standards and Double Standards by Rafael Lozano-Hemmer. The installation features an array of belts suspended from the ceiling, each actuated by stepper motors and dynamically oriented by a vision-based tracking system that follows the movements of exhibition visitors. The original system was limited by oscillatory dynamics, resulting in torsional and pendulum-like vibrations that constrained rotational speed and reduced interactive responsiveness. To address these challenges, the refurbishment involved significant upgrades to both hardware and motion control algorithms. A detailed mathematical model of the flying belt system was developed to accurately capture its dynamic behavior, providing a foundation for advanced control design. An input shaping method, formulated as a convex optimization problem, was implemented to effectively suppress vibrations, enabling smoother and faster belt movements. Experimental results demonstrate substantial improvements in system performance and audience interaction. This work exemplifies the integration of robotics, control engineering, and interactive art, offering new solutions to technical challenges in real-time motion control and vibration damping for large-scale kinetic installations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a refurbishment of the interactive robotic art installation Standards and Double Standards, featuring an array of ceiling-suspended belts actuated by stepper motors and dynamically oriented via vision-based tracking of visitors. The original oscillatory dynamics (torsional and pendulum-like vibrations) limited rotational speed and responsiveness. The authors develop a detailed mathematical model of the flying belt system to capture its dynamics and formulate an input shaping method as a convex optimization problem to suppress vibrations, enabling smoother and faster movements. Experimental results are reported to demonstrate substantial improvements in system performance and audience interaction.
Significance. If the model accurately represents the underactuated dynamics and the convex optimization produces effective input commands, this work offers a practical demonstration of vibration damping techniques for large-scale cable-suspended kinetic installations. It integrates control engineering with interactive art and could inform similar applications in robotics for real-time motion control of underactuated systems. The experimental setting in a public exhibition provides a useful test of practical performance gains.
major comments (1)
- [Mathematical model section] Mathematical model of the flying belt system: The central claim that this model accurately captures torsional and pendulum-like vibrations (providing the foundation for the convex input-shaping optimization) is load-bearing for the reported vibration suppression. The manuscript does not appear to include explicit validation against experimental frequency responses, sensitivity analysis for parameter uncertainty, or incorporation of nonlinear cable effects and actuator dynamics; without these, it is unclear whether the observed improvements stem from the control method or from hardware upgrades alone.
minor comments (2)
- [Abstract] Abstract: The description of 'substantial improvements' would be strengthened by including at least one quantitative metric (e.g., measured reduction in vibration amplitude or increase in maximum rotational speed).
- [Introduction or related work] The paper would benefit from additional references to prior input-shaping literature for cable-suspended or underactuated systems to better situate the convex optimization formulation.
Simulated Author's Rebuttal
We thank the referee for the careful review and constructive comments on our manuscript. We address the major comment regarding the mathematical model point by point below.
read point-by-point responses
-
Referee: [Mathematical model section] Mathematical model of the flying belt system: The central claim that this model accurately captures torsional and pendulum-like vibrations (providing the foundation for the convex input-shaping optimization) is load-bearing for the reported vibration suppression. The manuscript does not appear to include explicit validation against experimental frequency responses, sensitivity analysis for parameter uncertainty, or incorporation of nonlinear cable effects and actuator dynamics; without these, it is unclear whether the observed improvements stem from the control method or from hardware upgrades alone.
Authors: We agree that additional explicit validation would strengthen the presentation. In the revised manuscript we will add a dedicated subsection comparing the model's predicted natural frequencies (both torsional and pendulum modes) against experimental frequency responses obtained via FFT of free-vibration data collected on the installed belts. We will also include a sensitivity study showing that the convex-optimized inputs remain effective under parameter variations of up to 15 percent, consistent with our calibration tolerances. The model employs a linearized representation around the small operating angles (<5°) observed in the exhibition; we will add a brief justification for neglecting nonlinear cable sag and stretch based on the geometry and tension levels. Stepper-motor dynamics are approximated as a first-order lag whose time constant is identified from bench tests and folded into the optimization constraints. To separate the contributions of the new hardware from the control method, we will report comparative trials performed on the refurbished system both with and without the shaped inputs, confirming that residual vibrations are substantially lower only when the optimized commands are applied. revision: yes
Circularity Check
No circularity: model development and convex optimization are independent of fitted inputs or self-citations
full rationale
The paper first constructs a mathematical model of the flying belt dynamics from physical principles to capture torsional and pendulum vibrations, then uses that model to pose input shaping as a convex optimization problem whose solution is applied to the hardware. Experimental validation follows. No derivation step reduces by construction to a fitted parameter renamed as a prediction, no self-citation chain bears the central claim, and the optimization is not tautologically equivalent to its inputs. The approach remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
An input shaping method, formulated as a convex optimization problem, was implemented to effectively suppress vibrations... dual-mode robust shaper design... min h^T h subject to zero-vibration conditions (8) for both flexible modes
-
IndisputableMonolith/Foundation/DimensionForcing.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
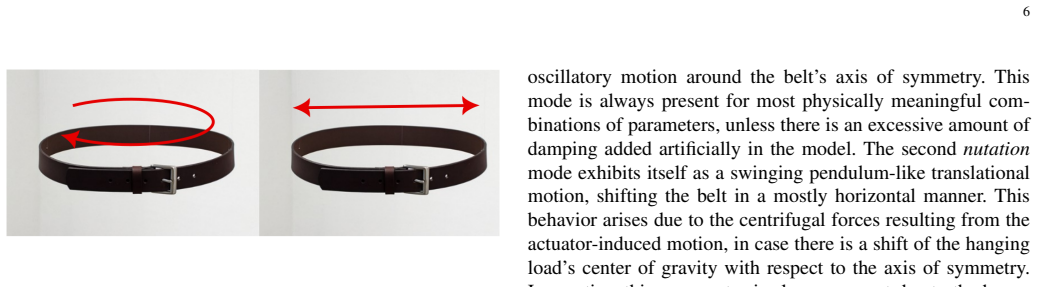
The flexible dynamics Pf describes the input-output contribution of the two dominant modes... torsional bending mode... nutation mode... resonance frequencies ω1,2
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Riskin, Genesis Redux: Essays in the History and Philosophy of Artificial Life
J. Riskin, Genesis Redux: Essays in the History and Philosophy of Artificial Life. University Of Chicago Press, 2007
work page 2007
-
[2]
Sch ¨offer, Nicolas Sch ¨offer
N. Sch ¨offer, Nicolas Sch ¨offer. Neuchatel: Editions du Griffon, 1963
work page 1963
-
[3]
Digital reflections: the dialogue of art and technology,
E. Kac, “Digital reflections: the dialogue of art and technology,” Art Journal, vol. 56, no. 3, pp. 60–67, 1997
work page 1997
-
[4]
Output: choreographed and reconfigured human and industrial robot bodies across artistic modalities,
C. Cuan, “Output: choreographed and reconfigured human and industrial robot bodies across artistic modalities,” Frontiers in Robotics and AI , vol. 7, 2021
work page 2021
-
[5]
Robotic dynamic sculpture: Architecture, modeling, and implementation of dynamic sculpture,
T. Zhang, K. Backstrom, R. Prince, C. Liu, Z. Qian, D. Zhang, and W. Zhang, “Robotic dynamic sculpture: Architecture, modeling, and implementation of dynamic sculpture,” IEEE Robotics & Automation Magazine, vol. 21, no. 3, pp. 96–104, 2014
work page 2014
-
[6]
Encountering robotic art: The social, material, and temporal processes of creation with machines,
Y . Qin, Y . Li, and E. Cheon, “Encountering robotic art: The social, material, and temporal processes of creation with machines,” in Proceedings of the 2025 CHI Conference on Human Factors in Computing Systems, ser. CHI ’25. ACM, Apr. 2025, p. 1–18. [Online]. Available: http://dx.doi.org/10.1145/3706598.3713327
-
[7]
The robot is present: Creative approaches for artistic expression with robots,
C. Gomez Cubero, M. Pekarik, V . Rizzo, and E. Jochum, “The robot is present: Creative approaches for artistic expression with robots,” Frontiers in Robotics and AI , vol. 8, p. 662249, 2021
work page 2021
-
[8]
Artistic robotic painting using the palette knife technique,
A. Beltramello, L. Scalera, S. Seriani, and P. Gallina, “Artistic robotic painting using the palette knife technique,” Robotics, vol. 9, no. 1, p. 15, 2020
work page 2020
-
[9]
Robotic vision for human-robot interaction and collaboration: A survey and systematic review,
N. Robinson, B. Tidd, D. Campbell, D. Kuli ´c, and P. Corke, “Robotic vision for human-robot interaction and collaboration: A survey and systematic review,” ACM Transactions on Human-Robot Interaction , vol. 12, no. 1, pp. 1–66, 2023
work page 2023
-
[10]
Robotic art comes to the engineering community [art and robotics],
D. St-Onge, “Robotic art comes to the engineering community [art and robotics],” IEEE Robotics & Automation Magazine , vol. 26, no. 3, pp. 103–104, 2019
work page 2019
- [11]
-
[12]
A. A. Shabana, Computational dynamics. Wiley, 2010
work page 2010
-
[13]
Posicast control of damped oscillatory systems,
O. J. Smith, “Posicast control of damped oscillatory systems,” Proceed- ings of the IRE , vol. 45, no. 9, pp. 1249–1255, 1957
work page 1957
-
[14]
Preshaping command inputs to reduce system vibration,
N. C. Singer and W. P. Seering, “Preshaping command inputs to reduce system vibration,” Journal of dynamic systems, measurement, and control, vol. 112, no. 1, pp. 76–82, 1990
work page 1990
-
[15]
Command generation for flexible systems by input shaping and command smoothing,
W. Singhose, R. Eloundou, and J. Lawrence, “Command generation for flexible systems by input shaping and command smoothing,” Journal of guidance, control, and dynamics , vol. 33, no. 6, pp. 1697–1707, 2010. 10
work page 2010
-
[16]
A linear programming approach to design robust input shaping,
L. Van den Broeck, G. Pipeleers, J. De Caigny, B. Demeulenaere, J. Swevers, and J. De Schutter, “A linear programming approach to design robust input shaping,” in 2008 10th IEEE International Workshop on Advanced Motion Control , 2008, pp. 80–85
work page 2008
-
[17]
A class of low-pass FIR input shaping filters achieving exact residual vibration cancelation,
M. O. Cole, “A class of low-pass FIR input shaping filters achieving exact residual vibration cancelation,” Automatica, vol. 48, no. 9, pp. 2377–2380, 2012
work page 2012
-
[18]
Distributed-delay input shaper with Bernstein polynomial kernel function,
T. Singh, J. Bu ˇsek, and T. Vyhl´ıdal, “Distributed-delay input shaper with Bernstein polynomial kernel function,” Automatica, vol. 166, p. 111720, 2024
work page 2024
-
[19]
Frequency weighted H2 optimization of multi-mode input shaper,
M. Goubej, T. Vyhl ´ıdal, and M. Schlegel, “Frequency weighted H2 optimization of multi-mode input shaper,” Automatica, vol. 121, p. 109202, 2020
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.