A hybrid dynamic model and parameter estimation method for accurately simulating overhead cranes with friction
Pith reviewed 2026-05-18 18:44 UTC · model grok-4.3
The pith
A hybrid dynamical model allows accurate simulation of 3D overhead cranes with friction while keeping computation efficient.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
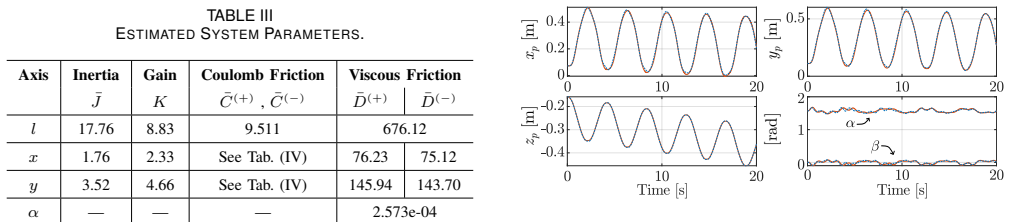
This paper presents a hybrid dynamical model that features a trade-off between high-fidelity friction modeling and computational efficiency. It also presents a step-by-step algorithm for the comprehensive estimation of all unknown system parameters, including friction, based on Bayesian Linear Regression and Least Squares estimations. Experimental validation with a laboratory crane confirms the effectiveness of the proposed modeling and estimation approach.
What carries the argument
The hybrid dynamical model that combines elements for accurate friction representation with efficient computation, along with the parameter estimation algorithm using Bayesian Linear Regression and Least Squares.
If this is right
- Simulations of crane movements become more accurate in capturing friction impacts.
- System parameters including friction can be reliably estimated from experimental data.
- The model enables better prediction of crane behavior under various conditions.
- Improved simulation fidelity supports development of more effective control strategies for overhead cranes.
Where Pith is reading between the lines
- Similar hybrid modeling approaches could be applied to other mechanical systems with significant friction, like robotic arms or vehicles.
- The estimation method might be extended to online parameter adaptation during operation.
- Validation on different crane sizes or loads could reveal the model's generalizability.
Load-bearing premise
The hybrid model structure captures the dominant nonlinear friction effects in 3D overhead crane motion and the collected experimental data is sufficiently informative without unmodeled disturbances.
What would settle it
Running simulations with the model and comparing to new experimental data from the laboratory crane under different operating conditions; if prediction errors for position and velocity are significantly larger than in the reported validation, the model and estimation would be falsified.
Figures









read the original abstract
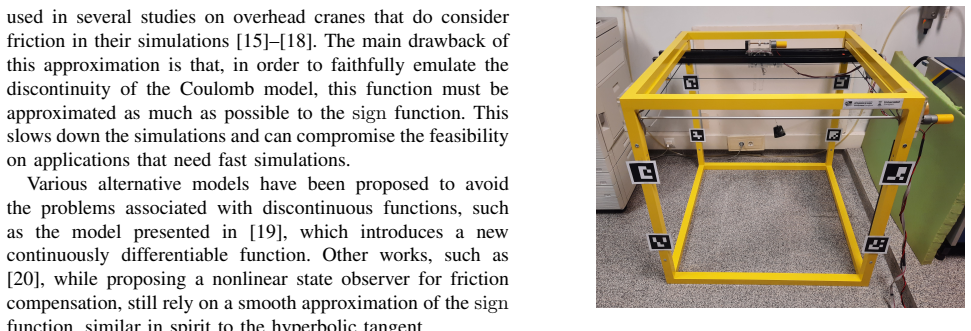
This paper presents a new approach to accurately simulating 3D overhead cranes with friction. Although nonlinear friction dynamics has a significant impact on these systems, accurately modeling this phenomenon in simulations is a significant challenge. Traditional methods often rely on imprecise approximations of friction or require excessive computational times for reliable results. To address this, we present a hybrid dynamical model that features a trade-off between high-fidelity friction modeling and computational efficiency. Furthermore, we present a step-by-step algorithm for the comprehensive estimation of all unknown system parameters, including friction. This methodology is based on Bayesian Linear Regression and Least Squares (LS) estimations. Finally, experimental validation with a laboratory crane confirms the effectiveness of the proposed modeling and estimation approach.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper introduces a hybrid dynamical model for 3D overhead cranes that incorporates friction via discrete modes to balance modeling fidelity with computational efficiency. It also presents a parameter estimation algorithm that combines Bayesian Linear Regression and Least Squares to identify all unknown parameters, including friction coefficients. Experimental validation on a laboratory crane is asserted to demonstrate the effectiveness of the proposed modeling and estimation approach.
Significance. If the hybrid structure and identification procedure can be shown to accurately capture nonlinear friction in coupled 3D motion, the work would offer a practical simulation tool for overhead crane systems, where friction significantly affects performance and control design. The step-by-step estimation algorithm and explicit trade-off between fidelity and efficiency are positive features that could aid reproducibility in systems and control applications.
major comments (2)
- [Abstract] Abstract: the assertion of experimental confirmation on a laboratory crane supplies no quantitative metrics, baseline comparisons against standard friction approximations, error bars, or data exclusion criteria, leaving the central claim of effectiveness without verifiable support.
- [Hybrid model formulation] Hybrid model formulation (equations defining continuous dynamics plus discrete friction modes): the choice of regressors for direction- and velocity-dependent friction together with the mode-switching thresholds is not accompanied by residual analysis, parameter covariance, or simulated-versus-measured comparisons on held-out trajectories, so it remains unclear whether the structure is expressive enough for 3D trolley-payload motion or whether switching introduces unmodeled discontinuities.
minor comments (2)
- [Model equations] Clarify the precise form of the friction regressors and the numerical values or criteria used for switching thresholds.
- [Parameter estimation algorithm] Add a table or list that explicitly maps each estimated parameter to its physical meaning and the sensor data used for its identification.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify how to strengthen the presentation of our results. We address each major comment below and indicate the changes planned for the revised manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion of experimental confirmation on a laboratory crane supplies no quantitative metrics, baseline comparisons against standard friction approximations, error bars, or data exclusion criteria, leaving the central claim of effectiveness without verifiable support.
Authors: We agree that the abstract would be strengthened by the inclusion of quantitative support. In the revised manuscript we will expand the abstract to report specific metrics obtained from the laboratory experiments, including RMSE values for trolley position and payload angles, comparisons against standard Coulomb-plus-viscous friction models, and mention of error bars derived from repeated trials. A brief statement on data exclusion (outlier removal due to sensor noise) will also be added. These additions will be kept concise while providing verifiable evidence for the claimed effectiveness. revision: yes
-
Referee: [Hybrid model formulation] Hybrid model formulation (equations defining continuous dynamics plus discrete friction modes): the choice of regressors for direction- and velocity-dependent friction together with the mode-switching thresholds is not accompanied by residual analysis, parameter covariance, or simulated-versus-measured comparisons on held-out trajectories, so it remains unclear whether the structure is expressive enough for 3D trolley-payload motion or whether switching introduces unmodeled discontinuities.
Authors: We acknowledge that additional diagnostic material would improve transparency. In the revision we will add residual plots for the friction regressors, the covariance matrix of the Bayesian-LS parameter estimates, and side-by-side simulated-versus-measured trajectories on held-out data segments. These will illustrate that the chosen direction- and velocity-dependent regressors together with the velocity-sign switching thresholds adequately capture the coupled 3D dynamics. The hybrid mode structure was deliberately limited to avoid chattering; the new comparisons will confirm that any residual discontinuities remain negligible relative to measurement noise. revision: yes
Circularity Check
No circularity: model structure and parameters derived from external data and standard regression
full rationale
The paper introduces a hybrid dynamical model for 3D overhead cranes incorporating friction modes and presents an explicit parameter estimation procedure based on Bayesian linear regression and least-squares fitting applied to laboratory sensor data. No derivation step reduces a claimed prediction or uniqueness result to a self-defined quantity, fitted input renamed as output, or load-bearing self-citation chain; the central claims rest on the chosen regressors and switching logic being sufficiently expressive for the observed motion, which is an empirical modeling choice rather than a definitional tautology. The experimental validation uses held-out trajectories and direct comparison to measurements, keeping the identification independent of the model equations themselves.
Axiom & Free-Parameter Ledger
free parameters (1)
- friction coefficients and hybrid switching thresholds
axioms (1)
- domain assumption The chosen hybrid structure is expressive enough to represent the dominant friction phenomena in 3D crane motion
Reference graph
Works this paper leans on
-
[1]
Robust sliding-mode control for a gantry crane system subject to external disturbance,
J. Zhang, W. Wu, and X. Huang, “Robust sliding-mode control for a gantry crane system subject to external disturbance,”Nonlinear Dyn., vol. 112, no. 6, pp. 4599–4615, Mar. 2024
work page 2024
-
[2]
J. Wei and W. Xu, “Fixed-Time Convergence Adaptive Robust Controller for Overhead Cranes Based on Reinforcement Learning Considering Input Saturation,”Int. J. Adapt. Control Signal Process., vol. 39, no. 6, pp. 1252–1273, Jun. 2025
work page 2025
-
[3]
Modeling and control of overhead cranes: A tutorial overview and perspectives,
M. R. Mojallizadeh, B. Brogliato, and C. Prieur, “Modeling and control of overhead cranes: A tutorial overview and perspectives,”Annu. Rev. Contr., vol. 56, p. 100877, Jan. 2023
work page 2023
-
[4]
H. Ouyang, R. Shi, X. Miao, H. Yi, and H. Xi, “Discrete adaptive sliding mode controller design for overhead cranes considering measurement noise and external disturbances,”Int. J. Robust Nonlinear Control, vol. 35, no. 1, pp. 188–201, Jan. 2025
work page 2025
-
[5]
N. P. Nguyen, Y . Kim, H. Oh, and J. Moon, “Composite trajectory tracking control for under-actuated crane systems with matched and mismatched disturbances: Theory and implementation,”Mech. Syst. Signal Process., vol. 226, p. 112337, Mar. 2025
work page 2025
-
[6]
Disturbance-observer-based nonlinear control for overhead cranes subject to uncertain disturbances,
X. Wu, K. Xu, and X. He, “Disturbance-observer-based nonlinear control for overhead cranes subject to uncertain disturbances,”Mech. Syst. Signal Process., vol. 139, p. 106631, May 2020
work page 2020
-
[7]
L. Ma, X. Lou, W. Wu, and X. Huang, “Neural network-based boundary control of a gantry crane system subject to input deadzone and external disturbance,”Nonlinear Dyn., vol. 108, no. 4, pp. 3449–3466, Jun. 2022
work page 2022
-
[8]
Adaptive Control Based Friction Estimation for Tracking Control of Robot Manipulators,
J. Huang, D. Tateo, P. Liu, and J. Peters, “Adaptive Control Based Friction Estimation for Tracking Control of Robot Manipulators,”IEEE Robotics and Automation Letters, vol. 10, no. 3, pp. 2454–2461, Mar. 2025
work page 2025
-
[9]
Modeling and control with friction compensation of a pendubot system
I. Soto, R. Campa, and S. Sánchez-Mazuca, “Modeling and control with friction compensation of a pendubot system.”Rev. Iberoam. Autom. Inform. Ind., vol. 18, no. 1, p. 39, Dec. 2020
work page 2020
-
[10]
Nonlinear Modeling and Control of Overhead Crane Load Sway,
K. A. F. Moustafa and A. M. Ebeid, “Nonlinear Modeling and Control of Overhead Crane Load Sway,”J. Dyn. Syst. Meas. Control, vol. 110, no. 3, pp. 266–271, Sep. 1988
work page 1988
-
[11]
Modeling and Control of a Three-Dimensional Overhead Crane,
H.-H. Lee, “Modeling and Control of a Three-Dimensional Overhead Crane,”J. Dyn. Syst. Meas. Control, vol. 120, no. 4, pp. 471–476, Dec. 1998
work page 1998
-
[12]
Friction Compensation in Robotics: an Overview,
B. Bona and M. Indri, “Friction Compensation in Robotics: an Overview,” inProc. 44th IEEE Conf Decision and Control. Seville, Spain: IEEE, 2005, pp. 4360–4367
work page 2005
-
[13]
Reliable chattering-free simulation of friction torque in joints present- ing high stiction,
R. Cisneros, M. Benallegue, R. Kikuuwe, M. Morisawa, and F. Kanehiro, “Reliable chattering-free simulation of friction torque in joints present- ing high stiction,” in2020 IEEE/RSJ Int. Conf. Intelligent Robots and Syst.Las Vegas, NV , USA: IEEE, Oct. 2020, pp. 6318–6325
work page 2020
-
[14]
Comparison and Identifiability Analysis of Friction Models for the Dither Motion of a Solenoid,
H. Wenzl, F. Straussberger, T. Braun, S. Wirtensohn, L. Kiltz, J. Reuter, and H. Aschemann, “Comparison and Identifiability Analysis of Friction Models for the Dither Motion of a Solenoid,” in2018 23rd Int. Conf. on Methods & Models in Automation & Robotics. Miedzyzdroje: IEEE, Aug. 2018, pp. 321–326
work page 2018
-
[15]
H. Jaafar, Z. Mohamed, M. Ahmad, N. Wahab, L. Ramli, and M. Sha- heed, “Control of an underactuated double-pendulum overhead crane using improved model reference command shaping: Design, simulation and experiment,”Mech. Syst. Signal Process., vol. 151, p. 107358, Apr. 2021
work page 2021
-
[16]
M. Bello, Z. Mohamed, M. Efe, and H. Ishak, “Modelling and dy- namic characterisation of a double-pendulum overhead crane carrying a distributed-mass payload,”Simul. Model. Pract. Th., vol. 134, p. 102953, Jul. 2024
work page 2024
-
[17]
Adaptive Tracking Control for an Overhead Crane System,
B. Ma, Y . Fang, and X. Zhang, “Adaptive Tracking Control for an Overhead Crane System,”IFAC Proc. Volumes, vol. 41, no. 2, pp. 12 194–12 199, 2008
work page 2008
-
[18]
Q. Guo, L. Chai, and H. Liu, “Anti-swing sliding mode control of three- dimensional double pendulum overhead cranes based on extended state observer,”Nonlinear Dyn., vol. 111, no. 1, pp. 391–410, Jan. 2023
work page 2023
-
[19]
Lyapunov-Based Track- ing Control in the Presence of Uncertain Nonlinear Parameterizable Friction,
C. Makkar, G. Hu, W. Sawyer, and W. Dixon, “Lyapunov-Based Track- ing Control in the Presence of Uncertain Nonlinear Parameterizable Friction,”IEEE Trans. Autom. Control, vol. 52, no. 10, pp. 1988–1994, Oct. 2007
work page 1988
-
[20]
Time-optimal flatness based control of a gantry crane,
B. Kolar, H. Rams, and K. Schlacher, “Time-optimal flatness based control of a gantry crane,”Control Eng. Pract., vol. 60, pp. 18–27, Mar. 2017
work page 2017
-
[21]
A new approach to overhead cranes parameter esti- mation and friction modeling,
A. Khatamianfar, “A new approach to overhead cranes parameter esti- mation and friction modeling,” in2014 IEEE Int. Conf. Systems, Man, and Cybernetics, Oct. 2014, pp. 2581–2586
work page 2014
-
[22]
Flatness-based nonlin- ear control of a three-dimensional gantry crane,
A. Lobe, A. Ettl, A. Steinboeck, and A. Kugi, “Flatness-based nonlin- ear control of a three-dimensional gantry crane,”IFAC-PapersOnLine, vol. 51, no. 22, pp. 331–336, 2018
work page 2018
-
[23]
R. Goebel, R. G. Sanfelice, and A. R. Teel, “Hybrid dynamical systems,” IEEE Control Syst., vol. 29, no. 2, pp. 28–93, Apr. 2009
work page 2009
-
[24]
Ljung,System identification : theory for the user., 2nd ed., ser
L. Ljung,System identification : theory for the user., 2nd ed., ser. Prentice-Hall Information and System Sciences Series. Prentice-Hall, 1999
work page 1999
-
[25]
C. Rasmussen and C. Williams,Gaussian Processes for Machine Learn- ing, ser. Adaptive Computation and Machine Learning series. MIT Press, 2005
work page 2005
-
[26]
Keesman,System Identification: An Introduction, ser
K. Keesman,System Identification: An Introduction, ser. Advanced Textbooks in Control and Signal Processing. Springer London, 2011
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.