Terra: Hierarchical Terrain-Aware 3D Scene Graph for Task-Agnostic Outdoor Mapping
Pith reviewed 2026-05-18 13:46 UTC · model grok-4.3
The pith
A terrain-aware 3D scene graph built from indoor techniques plus outdoor geometry supports task-agnostic robotic mapping in varied environments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
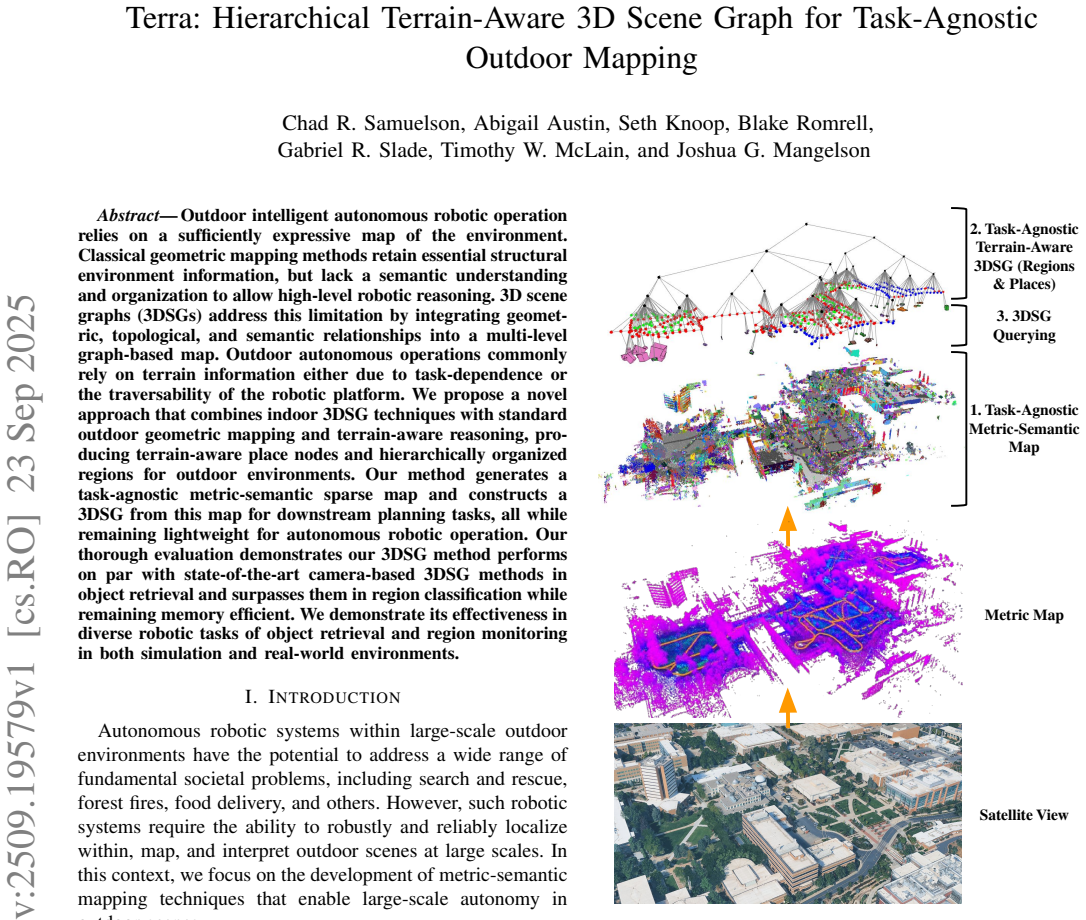
The central claim is that combining indoor 3DSG techniques with standard outdoor geometric mapping and terrain-aware reasoning produces terrain-aware place nodes and hierarchically organized regions, from which a task-agnostic metric-semantic sparse map is constructed that supports downstream planning while remaining lightweight.
What carries the argument
The fusion of indoor 3D scene graph construction (multi-level graphs that link geometry, topology, and semantics) with outdoor geometric mapping and terrain-aware reasoning, which directly supplies terrain-aware place nodes and hierarchical region organization.
If this is right
- Object retrieval performance matches state-of-the-art camera-based 3D scene graph methods.
- Region classification accuracy exceeds that of the same state-of-the-art methods.
- Memory use remains lower than competing approaches while supporting onboard robotic operation.
- The same map enables effective object retrieval and region monitoring in both simulated and real-world outdoor settings.
Where Pith is reading between the lines
- The same hierarchical structure could support path planning that prefers stable terrain without adding a separate traversability layer.
- Extending the place nodes to include seasonal or weather-dependent terrain changes would test whether the hierarchy remains stable over time.
- Direct comparison against purely geometric outdoor maps on the same downstream tasks would quantify how much the added semantic and terrain layers improve high-level reasoning.
Load-bearing premise
That indoor 3D scene graph methods plus standard outdoor geometry and terrain reasoning will produce maps that stay effective across many different outdoor settings without needing separate tuning for each robotic task.
What would settle it
A set of outdoor trials in previously unseen terrain types where region classification accuracy drops below that of current camera-based scene-graph methods or where memory footprint exceeds comparable approaches while task performance is measured.
Figures







read the original abstract
Outdoor intelligent autonomous robotic operation relies on a sufficiently expressive map of the environment. Classical geometric mapping methods retain essential structural environment information, but lack a semantic understanding and organization to allow high-level robotic reasoning. 3D scene graphs (3DSGs) address this limitation by integrating geometric, topological, and semantic relationships into a multi-level graph-based map. Outdoor autonomous operations commonly rely on terrain information either due to task-dependence or the traversability of the robotic platform. We propose a novel approach that combines indoor 3DSG techniques with standard outdoor geometric mapping and terrain-aware reasoning, producing terrain-aware place nodes and hierarchically organized regions for outdoor environments. Our method generates a task-agnostic metric-semantic sparse map and constructs a 3DSG from this map for downstream planning tasks, all while remaining lightweight for autonomous robotic operation. Our thorough evaluation demonstrates our 3DSG method performs on par with state-of-the-art camera-based 3DSG methods in object retrieval and surpasses them in region classification while remaining memory efficient. We demonstrate its effectiveness in diverse robotic tasks of object retrieval and region monitoring in both simulation and real-world environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Terra, a hierarchical terrain-aware 3D scene graph (3DSG) for task-agnostic outdoor mapping. It combines indoor 3DSG construction techniques with standard outdoor geometric mapping and terrain-aware reasoning to produce terrain-aware place nodes and hierarchically organized regions. The resulting sparse metric-semantic map is intended to support downstream planning while remaining lightweight. The central claims are that the method achieves performance on par with state-of-the-art camera-based 3DSG methods in object retrieval, surpasses them in region classification, and is more memory efficient, with demonstrations in simulation and real-world robotic tasks such as object retrieval and region monitoring.
Significance. If the performance claims hold under equivalent conditions, the work would provide a practical way to extend 3DSG representations to outdoor settings by incorporating terrain information without task-specific tuning. This addresses a relevant gap for autonomous robotics in unstructured environments. The constructive combination of prior indoor and outdoor techniques is a reasonable framing, though the strength of the contribution depends on the rigor of the comparative evaluation.
major comments (2)
- [Evaluation] Evaluation section (and abstract claims): the headline result of on-par object retrieval and superior region classification rests on direct comparison to camera-based 3DSG baselines, but the manuscript does not report whether those baselines were re-implemented, re-tuned, or extended with terrain-aware nodes and hierarchical partitioning on the same outdoor sequences. This detail is load-bearing for interpreting whether the reported gains reflect genuine advances in the hierarchical construction rather than domain mismatch.
- [Methods] Methods section on terrain-aware reasoning: the integration of indoor 3DSG techniques with outdoor geometric mapping is described at a high level, but the precise construction of terrain-aware place nodes and the hierarchical region partitioning lacks sufficient algorithmic or pseudocode detail to allow independent reproduction or assessment of whether the approach is parameter-free or requires outdoor-specific tuning.
minor comments (2)
- [Abstract] The abstract states 'thorough evaluation' but does not name the specific outdoor datasets, sequences, or quantitative metrics (e.g., precision-recall curves, memory footprint in MB) used for the object retrieval and region classification comparisons.
- [Figures/Tables] Figure captions and table headings could more explicitly indicate whether results include error bars or multiple runs to support the 'on par' and 'surpasses' statements.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback on our manuscript. The comments highlight important aspects of clarity in the evaluation and methods sections that we will address to strengthen the paper. We respond to each major comment below.
read point-by-point responses
-
Referee: [Evaluation] Evaluation section (and abstract claims): the headline result of on-par object retrieval and superior region classification rests on direct comparison to camera-based 3DSG baselines, but the manuscript does not report whether those baselines were re-implemented, re-tuned, or extended with terrain-aware nodes and hierarchical partitioning on the same outdoor sequences. This detail is load-bearing for interpreting whether the reported gains reflect genuine advances in the hierarchical construction rather than domain mismatch.
Authors: We agree that the manuscript should explicitly describe the baseline evaluation protocol to support interpretation of the results. The camera-based 3DSG baselines were re-implemented from their original publications and evaluated on the identical outdoor simulation and real-world sequences used for Terra. No terrain-aware extensions or hierarchical partitioning were added to the baselines, as these are core contributions of our method; the comparison is intended to isolate the benefits of terrain integration and hierarchical organization. We will revise the evaluation section (and update the abstract if needed for consistency) to include a dedicated subsection detailing baseline re-implementation, parameter settings, dataset sequences, and any platform-specific adaptations, thereby clarifying that the reported performance differences arise from our terrain-aware and hierarchical design rather than domain mismatch. revision: yes
-
Referee: [Methods] Methods section on terrain-aware reasoning: the integration of indoor 3DSG techniques with outdoor geometric mapping is described at a high level, but the precise construction of terrain-aware place nodes and the hierarchical region partitioning lacks sufficient algorithmic or pseudocode detail to allow independent reproduction or assessment of whether the approach is parameter-free or requires outdoor-specific tuning.
Authors: We acknowledge that greater algorithmic specificity is required for reproducibility. The terrain-aware place nodes are formed by fusing geometric terrain features (elevation, slope, and traversability estimates from the outdoor mapping pipeline) with semantic object and surface labels from the indoor 3DSG construction, using a terrain-conditioned clustering step. Hierarchical regions are then obtained via recursive partitioning that groups place nodes according to terrain homogeneity and semantic coherence metrics. While the overall pipeline is designed to be task-agnostic and does not require per-task retuning, a small number of platform-dependent thresholds (e.g., slope tolerance for the robot) are used. We will expand the methods section with pseudocode for both the place-node construction and region-partitioning procedures, plus a table or paragraph explicitly listing all parameters, their default values, and how they are chosen from robot specifications, to enable independent reproduction and assessment of tuning requirements. revision: yes
Circularity Check
Constructive combination of prior techniques; no load-bearing self-referential derivations or fitted predictions
full rationale
The paper frames its contribution as a constructive integration of established indoor 3DSG methods with standard outdoor geometric mapping and terrain-aware reasoning to produce hierarchical place nodes and regions. Evaluation results on object retrieval and region classification are presented as direct empirical comparisons rather than derived quantities. No equations or steps are shown that reduce by construction to fitted parameters, self-defined inputs, or unverified self-citations. The central mapping pipeline remains self-contained against external benchmarks, consistent with a normal non-circular constructive approach. Minor self-citations to prior indoor 3DSG work are present but not load-bearing for the outdoor-specific claims.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We propose a novel approach that combines indoor 3DSG techniques with standard outdoor geometric mapping and terrain-aware reasoning, producing terrain-aware place nodes and hierarchically organized regions... GVD using the brushfire algorithm... agglomerative clustering... spectral clustering
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
task-agnostic metric-semantic sparse map... terrain-aware place nodes... hierarchical region nodes
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
LeGO-LOAM: Lightweight and ground- optimized lidar odometry and mapping on variable terrain,
T. Shan and B. Englot, “LeGO-LOAM: Lightweight and ground- optimized lidar odometry and mapping on variable terrain,” inProc. of the IEEE Intl. Conf. on Intelligent Robots and Systems (IROS), 2018
work page 2018
-
[2]
LIO-SAM: Tightly-coupled lidar inertial odometry via smoothing and mapping,
T. Shan, B. Englot, D. Meyers, W. Wang, C. Ratti, and R. Daniela, “LIO-SAM: Tightly-coupled lidar inertial odometry via smoothing and mapping,” inProc. of the IEEE Intl. Conf. on Intelligent Robots and Systems (IROS), 2020. (a) (b) (c) Fig. 8: Path planning results for the task “Get bike from the bicycle rack.” (a) Terrain-colored places layer. (b) Path f...
work page 2020
-
[3]
FAST-LIO2: Fast direct lidar-inertial odometry,
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “FAST-LIO2: Fast direct lidar-inertial odometry,”IEEE Transactions on Robotics, vol. 38, no. 4, pp. 2053–2073, 2022
work page 2053
-
[4]
Ef- ficientLPS: Efficient lidar panoptic segmentation,
K. Sirohi, R. Mohan, D. B ¨uscher, W. Burgard, and A. Valada, “Ef- ficientLPS: Efficient lidar panoptic segmentation,”IEEE Transactions on Robotics, vol. 38, no. 3, pp. 1894–1914, 2022
work page 1914
-
[5]
Lidar panoptic segmentation in an open world,
A. S. Chakravarthy, M. R. Ganesina, P. Hu, L. Leal-Taixe, S. Kong, D. Ramanan, and A. Osep, “Lidar panoptic segmentation in an open world,”Intl. Journal of Computer Vision, pp. 1153–1174, 2024
work page 2024
-
[6]
Segment any point cloud sequences by distilling vision foundation models,
Y . Liu, L. Kong, J. Cen, R. Chen, W. Zhang, L. Pan, K. Chen, and Z. Liu, “Segment any point cloud sequences by distilling vision foundation models,” inProc. of the Conf. on Neural Information Processing Systems (NeurIPS), 2023
work page 2023
-
[7]
Better call SAL: Towards learning to segment anything in lidar,
A. O ˇsep, T. Meinhardt, F. Ferroni, N. Peri, D. Ramanan, and L. Leal- Taix´e, “Better call SAL: Towards learning to segment anything in lidar,” inProc. of the European Conf. on Computer Vision (ECCV), 2024
work page 2024
-
[8]
Clio: Real-time task-driven open-set 3D scene graphs,
D. Maggio, Y . Chang, N. Hughes, M. Trang, D. Griffith, C. Dougherty, E. Cristofalo, L. Schmid, and L. Carlone, “Clio: Real-time task-driven open-set 3D scene graphs,”IEEE Robotics and Automation Letters (RAL), vol. 9, no. 10, pp. 8921–8928, 2024
work page 2024
-
[9]
Hi- erarchical open-vocabulary 3D scene graphs for language-grounded robot navigation,
A. Werby, C. Huang, M. B ¨uchner, A. Valada, and W. Burgard, “Hi- erarchical open-vocabulary 3D scene graphs for language-grounded robot navigation,”Robotics: Science and Systems (RSS), 2024
work page 2024
-
[10]
ConceptGraphs: Open-vocabulary 3D scene graphs for perception and planning,
Q. Gu, A. Kuwajerwala, S. Morin, K. M. Jatavallabhula, B. Sen, A. Agarwal, C. Rivera, W. Paul, K. Ellis, R. Chellappa, C. Gan, C. M. De Melo, J. B. Tenenbaum, A. Torralba, F. Shkurti, and L. Paull, “ConceptGraphs: Open-vocabulary 3D scene graphs for perception and planning,” inProc. of the IEEE Intl. Conf. on Robotics and Automation (ICRA), 2024
work page 2024
-
[11]
Visual genome: Connecting language and vision using crowdsourced dense image annotations,
R. Krishna, Y . Zhu, O. Groth, J. Johnson, K. Hata, J. Kravitz, S. Chen, Y . Kalantidis, L. Li, D. A. Shamma, M. S. Bernstein, and L. Fei-Fei, “Visual genome: Connecting language and vision using crowdsourced dense image annotations,”Intl. J. of Computer Vision, vol. 123, no. 1, pp. 32–73, 2017
work page 2017
-
[12]
3D scene graph: A structure for unified semantics, 3D space, and camera,
I. Armeni, Z.-Y . He, A. Zamir, J. Gwak, J. Malik, M. Fischer, and S. Savarese, “3D scene graph: A structure for unified semantics, 3D space, and camera,” inProc. of the IEEE Intl. Conf. on Computer Vision (ICCV), 2019
work page 2019
-
[13]
3D semantic parsing of large-scale indoor spaces,
I. Armeni, O. Sener, A. R. Zamir, H. Jiang, I. Brilakis, M. Fischer, and S. Savarese, “3D semantic parsing of large-scale indoor spaces,” in Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), 2016
work page 2016
-
[14]
Kimera: an open- source library for real-time metric-semantic localization and mapping,
A. Rosinol, M. Abate, Y . Chang, and L. Carlone, “Kimera: an open- source library for real-time metric-semantic localization and mapping,” inProc. of the IEEE Intl. Conf. on Robotics and Automation (ICRA), 2020
work page 2020
-
[15]
3D dynamic scene graphs: Actionable spatial perception with places, objects, and humans
A. Rosinol, A. Gupta, M. Abate, J. Shi, and L. Carlone, “3D dynamic scene graphs: Actionable spatial perception with places, objects, and humans.” [Online]. Available: https://arxiv.org/abs/2002.06289
-
[16]
Hydra: A real-time spatial perception system for 3D scene graph construction and optimization,
N. Hughes, Y . Chang, and L. Carlone, “Hydra: A real-time spatial perception system for 3D scene graph construction and optimization,” Robotics: Science and Systems (RSS), 2022
work page 2022
-
[17]
S- Graphs 2.0 – a hierarchical-semantic optimization and loop closure for SLAM,
H. Bavle, J. L. Sanchez-Lopez, M. Shaheer, J. Civera, and H. V oos, “S- Graphs 2.0 – a hierarchical-semantic optimization and loop closure for SLAM,” 2025. [Online]. Available: https://arxiv.org/abs/2502.18044
-
[18]
The bare necessities: Designing simple, effective open-vocabulary scene graphs,
C. Kassab, M. Mattamala, S. Morin, M. B ¨uchner, A. Valada, L. Paull, and M. Fallon, “The bare necessities: Designing simple, effective open-vocabulary scene graphs,” 2024. [Online]. Available: https://arxiv.org/abs/2412.01539
-
[19]
X. Zhao, W. Ding, Y . An, Y . Du, T. Yu, M. Li, M. Tang, and J. Wang, “Fast segment anything,” 2023. [Online]. Available: https://arxiv.org/abs/2306.12156
-
[20]
Learning transferable visual models from natural language supervi- sion,
A. Radford, J. W. Kim, C. Hallacy, A. Ramesh, G. Goh, S. Agarwal, G. Sastry, A. Askell, P. Mishkin, J. Clark, G. Krueger, and I. Sutskever, “Learning transferable visual models from natural language supervi- sion,” inProc. of the Intl. Conf. on Machine Learning (ICML), 2021
work page 2021
-
[21]
Graph2Nav: 3D object-relation graph generation to robot navigation,
T. Shan, A. Rajvanshi, N. C. Mithun, and H.-P. Chiu, “Graph2Nav: 3D object-relation graph generation to robot navigation,” inProc. of the IEEE Intl. Conf. on Robotics and Automation (ICRA), 2025
work page 2025
-
[22]
Task and motion planning in hierarchical 3D scene graphs,
A. Ray, C. Bradley, L. Carlone, and N. Roy, “Task and motion planning in hierarchical 3D scene graphs,” 2024. [Online]. Available: https://arxiv.org/abs/2403.08094
-
[23]
Indoor and outdoor 3D scene graph generation via language-enabled spatial ontologies,
J. Strader, N. Hughes, W. Chen, A. Speranzon, and L. Carlone, “Indoor and outdoor 3D scene graph generation via language-enabled spatial ontologies,”IEEE Robotics and Automation Letters (RAL), vol. 9, no. 6, pp. 4886–4893, 2024
work page 2024
-
[24]
Collaborative dynamic 3D scene graphs for open-vocabulary urban scene under- standing,
T. Steinke, M. B ¨uchner, N. V ¨odisch, and A. Valada, “Collaborative dynamic 3D scene graphs for open-vocabulary urban scene under- standing,” inProc. of the IEEE Intl. Conf. on Intelligent Robots and Systems (IROS), 2025
work page 2025
-
[25]
Y . Zhang, Y . Ruan, M. Pan, Y . Yang, and M. Fu, “Parking-SG: Open-vocabulary hierarchical 3D scene graph representation for open parking environments,” inProc. of the IEEE Intl. Conf. on Robotics and Automation (ICRA), 2025
work page 2025
- [26]
-
[27]
YOLOv8: A novel object detection algorithm with enhanced performance and robustness,
R. Varghese and S. M., “YOLOv8: A novel object detection algorithm with enhanced performance and robustness,” inProc. of the Intl. Conf. on Advances in Data Engineering and Intelligent Computing Systems (ADICS), 2024
work page 2024
-
[28]
Multidimensional binary search trees used for asso- ciative searching,
J. L. Bentley, “Multidimensional binary search trees used for asso- ciative searching,”Communications of the ACM, vol. 18, no. 9, p. 509–517, 1975
work page 1975
-
[29]
A density-based algorithm for discovering clusters in large spatial databases with noise
M. Ester, H.-P. Kriegel, J. Sander, X. Xuet al., “A density-based algorithm for discovering clusters in large spatial databases with noise.” inProc. of the Intl. Conf. on Knowledge Discovery and Data Mining, 1996
work page 1996
-
[30]
Efficient grid-based spatial rep- resentations for robot navigation in dynamic environments,
B. Lau, C. Sprunk, and W. Burgard, “Efficient grid-based spatial rep- resentations for robot navigation in dynamic environments,”Robotics and Autonomous Systems, vol. 61, no. 10, pp. 1116–1130, 2013
work page 2013
-
[31]
HoloOcean: An underwater robotics simulator,
E. Potokar, S. Ashford, M. Kaess, and J. Mangelson, “HoloOcean: An underwater robotics simulator,” inProc. of the IEEE Intl. Conf. on Robotics and Automation (ICRA), 2022
work page 2022
-
[32]
CLIP-DINOiser: Teaching CLIP a few DINO tricks for open-vocabulary semantic segmentation,
M. Wysocza ´nska, O. Sim ´eoni, M. Ramamonjisoa, A. Bursuc, T. Trzci ´nski, and P. P ´erez, “CLIP-DINOiser: Teaching CLIP a few DINO tricks for open-vocabulary semantic segmentation,” inProc. of the European Conf. on Computer Vision (ECCV), 2024
work page 2024
-
[33]
Grounding DINO: Marrying DINO with grounded pre-training for open-set object detection,
S. Liu, Z. Zeng, T. Ren, F. Li, H. Zhang, J. Yang, Q. Jiang, C. Li, J. Yang, H. Su, J. Zhu, and L. Zhang, “Grounding DINO: Marrying DINO with grounded pre-training for open-set object detection,” in Proc. of the European Conf. on Computer Vision (ECCV), 2024
work page 2024
- [34]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.