Hybrid Task and Motion Planning with Reactive Collision Handling for Multi-Robot Disassembly of Complex Products: Application to EV Batteries
Pith reviewed 2026-05-18 14:13 UTC · model grok-4.3
The pith
A closed-loop vision-driven task and motion planner for two robots cuts total path length by 63 percent during EV battery disassembly.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
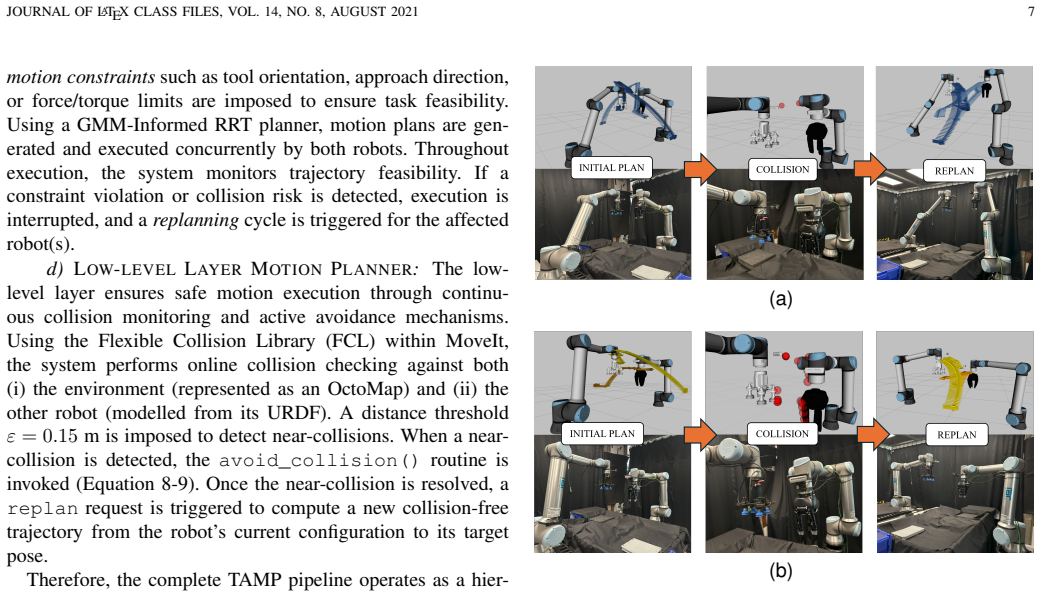
The proposed vision-driven TAMP framework integrates task decomposition and allocation with a GMM-informed RRT motion planner and a hybrid safety layer of predictive collision checking in a MoveIt/FCL digital twin together with reactive vision-based avoidance and replanning. Operating in closed loop by updating the remaining task sequence from repeated scene scans and completion-state tracking, the system satisfies task precedence, geometric feasibility, dynamic obstacle avoidance, and dual-arm coordination constraints simultaneously.
What carries the argument
The hybrid safety layer that combines predictive collision checking in a digital twin with reactive vision-based avoidance and replanning, coupled with closed-loop task sequence updates from vision.
If this is right
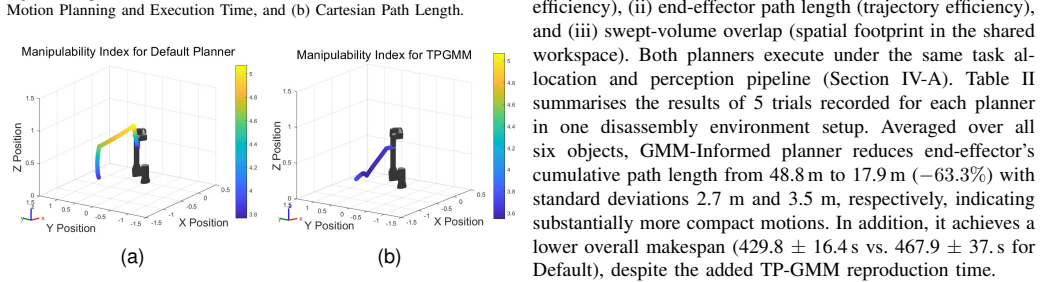
- Reduces cumulative end-effector path length from 48.8 m to 17.9 m in EV battery disassembly experiments.
- Improves makespan from 467.9 s to 429.8 s under identical perception and task assignments.
- Reduces swept volumes for each robot and their overlap volume.
- Improves motion compactness, safety, and scalability to broader multi-robot sequential manipulation tasks.
Where Pith is reading between the lines
- The approach could extend to other complex product disassembly where perception can track progress reliably.
- Combining predictive and reactive methods may generalize to other dual-arm coordination problems beyond disassembly.
- Further scaling might require handling more than two robots or additional uncertainty sources.
- Testable by applying the same framework to different battery types or product categories.
Load-bearing premise
The framework assumes vision can reliably and timely track task completions and update the remaining sequence without significant errors, delays, or occlusions that invalidate task or geometric constraints.
What would settle it
A set of experiments introducing realistic perception errors, delays, or occlusions during disassembly that cause the system to fail task precedence or produce paths no better than the default RRTConnect planner.
Figures








read the original abstract
This paper addresses the problem of multi-robot coordination for complex manipulation task sequences. We present a vision-driven task-and-motion planning (TAMP) framework for a real dual-agent platform that integrates task decomposition and allocation with a learning-based RRT planner. A GMM-informed motion planner is coupled with a hybrid safety layer that combines predictive collision checking in a MoveIt/FCL digital twin with reactive vision-based avoidance and replanning. This integration is challenging as the system jointly satisfies task precedence, geometric feasibility, dynamic obstacle avoidance, and dual-arm coordination constraints. The framework operates in closed loop by updating the remaining task sequence from repeated scene scans and completion-state tracking rather than executing a fixed open-loop plan. In EV battery disassembly experiments, compared with Default-RRTConnect under identical perception and task assignments, the proposed system reduces cumulative end-effector path length from 48.8 to 17.9~m ($-63.3\%$), improves makespan from 467.9 to 429.8~s ($-8.1\%$), and reduces swept volumes (R1: $0.583\rightarrow0.139\,\mathrm{m}^3$, R2: $0.696\rightarrow0.252\,\mathrm{m}^3$) and overlap ($0.064\rightarrow0.034\,\mathrm{m}^3$). These results show that combining predictive planning and reactive collision avoidance in a real dual-arm disassembly scenario improves motion compactness, safety, and scalability to broader multi-robot sequential manipulation tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a vision-driven hybrid task-and-motion planning (TAMP) framework for multi-robot disassembly of complex products, demonstrated on EV batteries with a real dual-arm platform. It integrates task decomposition/allocation, a GMM-informed learning-based RRT motion planner, and a hybrid safety layer that combines predictive collision checking in a MoveIt/FCL digital twin with reactive vision-based avoidance and replanning. The system runs in closed loop by repeatedly scanning the scene to update the remaining task sequence and completion state, rather than using a fixed open-loop plan. Experiments report concrete gains versus Default-RRTConnect under identical perception and task assignments: cumulative end-effector path length reduced from 48.8 m to 17.9 m (−63.3 %), makespan from 467.9 s to 429.8 s (−8.1 %), and lower swept volumes (R1: 0.583→0.139 m³, R2: 0.696→0.252 m³) plus overlap (0.064→0.034 m³).
Significance. If the central claims hold, the work shows that coupling predictive planning with reactive vision-based collision handling can deliver substantial improvements in motion compactness, safety, and coordination for sequential multi-robot manipulation on physical hardware. The manuscript earns credit for reporting concrete quantitative improvements on a real dual-arm platform with a named baseline (Default-RRTConnect) under matched perception and task conditions, together with direct physical measurements of path length, makespan, and swept volumes. These elements strengthen its relevance for practical robotic disassembly and recycling applications.
major comments (1)
- [EV Battery Disassembly Experiments] EV Battery Disassembly Experiments: the reported performance gains (−63.3 % path length, −8.1 % makespan, reduced swept volumes) are obtained under closed-loop operation that repeatedly updates the task sequence from vision-based scene scans and completion-state tracking. The manuscript provides no quantitative data on perception reliability (e.g., false-negative rates for part removal, occlusion handling, or latency), which is load-bearing for preserving task precedence and geometric feasibility; a single missed detection could invalidate subsequent plans and erase the claimed benefits.
minor comments (2)
- [Abstract] Abstract and results presentation: the abstract and experimental section should state the number of trials performed and report statistical variability (standard deviations or confidence intervals) for all metrics; without these the reproducibility of the −63.3 % and −8.1 % figures cannot be fully assessed.
- [Framework Description] Notation and implementation clarity: the exact interface between the predictive FCL checker and the reactive vision avoidance (e.g., priority rules, replanning trigger thresholds) is described only at a high level; a diagram or pseudocode would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for recognizing the quantitative gains demonstrated on the physical dual-arm platform. We respond to the major comment below.
read point-by-point responses
-
Referee: [EV Battery Disassembly Experiments] EV Battery Disassembly Experiments: the reported performance gains (−63.3 % path length, −8.1 % makespan, reduced swept volumes) are obtained under closed-loop operation that repeatedly updates the task sequence from vision-based scene scans and completion-state tracking. The manuscript provides no quantitative data on perception reliability (e.g., false-negative rates for part removal, occlusion handling, or latency), which is load-bearing for preserving task precedence and geometric feasibility; a single missed detection could invalidate subsequent plans and erase the claimed benefits.
Authors: We agree that the manuscript does not include quantitative metrics on perception reliability such as false-negative rates, occlusion statistics, or measured latency. The reported performance improvements were obtained from successful physical executions of the complete disassembly sequence under the closed-loop vision-driven system. In these trials the perception pipeline correctly identified all part removals and maintained valid task precedence without errors that invalidated subsequent plans. In the revised version we will add a short subsection in the experimental evaluation that describes the observed perception behavior during the reported runs, including how occlusions were managed by the repeated scanning cycle and the approximate update latency of the closed loop. This addition will provide readers with the necessary context for interpreting the robustness of the claimed gains. revision: partial
Circularity Check
No significant circularity in experimental framework or results
full rationale
The paper presents a hybrid TAMP framework for multi-robot EV battery disassembly, validated through direct physical experiments comparing the proposed system to Default-RRTConnect under identical perception and task assignments. Reported improvements (path length, makespan, swept volumes) are measured outcomes on real hardware rather than derived predictions. No equations, self-definitional reductions, fitted parameters renamed as predictions, or load-bearing self-citations appear in the provided text; the closed-loop vision updates are an operational assumption, not a circular derivation step. The derivation chain is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Vision system provides sufficiently accurate and timely updates to scene state and task completion for closed-loop replanning
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquationwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Jj = min sum d(xi, pj) (distance-based execution cost); GMM-informed RRTConnect with OctoMap/FCL collision avoidance
-
IndisputableMonolith/Foundation/RealityFromDistinctionreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Four-layer TAMP with YOLOv8 perception and closed-loop task updates for EV battery disassembly
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Robust and efficient task scheduling for robotics applications with reinforcement learning,
M. Tejer, R. Szczepanski, and T. Tarczewski, “Robust and efficient task scheduling for robotics applications with reinforcement learning,” Engineering Applications of Artificial Intelligence, vol. 127, p. 107300, 2024
work page 2024
-
[2]
S. Fatemi-Anaraki, R. Tavakkoli-Moghaddam, M. Foumani, and B. Vahedi-Nouri, “Scheduling of multi-robot job shop systems in dy- namic environments: Mixed-integer linear programming and constraint programming approaches,”Omega, vol. 115, p. 102770, 2023
work page 2023
-
[3]
H. Touzani, N. S ´eguy, H. Hadj-Abdelkader, R. Su ´arez, J. Rosell, L. Palomo-Avellaneda, and S. Bouchafa, “Efficient industrial solution for robotic task sequencing problem with mutual collision avoidance & cycle time optimization,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2597–2604, 2022
work page 2022
-
[4]
Disassembly of electric vehicle batteries using the example of the audi q5 hybrid system,
K. Wegener, S. Andrew, A. Raatz, K. Dr ¨oder, and C. Herrmann, “Disassembly of electric vehicle batteries using the example of the audi q5 hybrid system,”Procedia CIRP, vol. 23, pp. 155–160, 2014, 5th CATS 2014 - CIRP Conference on Assembly Technologies and Systems
work page 2014
-
[5]
Abatre-sim: A comprehensive framework for automated battery recycling simulation,
H. Wang, K. Zhang, K. Zhu, Z. Song, and Z. Li, “Abatre-sim: A comprehensive framework for automated battery recycling simulation,” 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1–8, 2023
work page 2023
-
[6]
Reducing the Barrier to Entry of Complex Robotic Software: a MoveIt! Case Study
D. Coleman, I. A. Sucan, S. Chitta, and N. Correll, “Reducing the barrier to entry of complex robotic software: a moveit! case study,”CoRR, vol. abs/1404.3785, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[7]
Fcl: A general purpose library for collision and proximity queries,
J. Pan, S. Chitta, and D. Manocha, “Fcl: A general purpose library for collision and proximity queries,” in2012 IEEE International Conference on Robotics and Automation, 2012, pp. 3859–3866
work page 2012
-
[8]
Optimal robot task schedul- ing based on adaptive neuro-fuzzy system and genetic algorithms,
E. Xidias, V . Moulianitis, and P. Azariadis, “Optimal robot task schedul- ing based on adaptive neuro-fuzzy system and genetic algorithms,”The International Journal of Advanced Manufacturing Technology, vol. 115, no. 3, pp. 927–939, 07 2021, copyright - © Springer-Verlag London Ltd., part of Springer Nature 2020; Last updated - 2023-11-25
work page 2021
-
[9]
Affordance wayfields for task and motion planning,
T. McMahon, O. C. Jenkins, and N. Amato, “Affordance wayfields for task and motion planning,” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, pp. 2955–2962
work page 2018
-
[10]
Y . Zhao, P. Fillatreau, M. H. Karray, and B. Archimede, “An ontology- based approach towards coupling task and path planning for the sim- ulation of manipulation tasks,” in2018 IEEE/ACS 15th International Conference on Computer Systems and Applications (AICCSA), 2018, pp. 1–8. JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2021 12
work page 2018
-
[11]
General purpose task and motion planning for human-robot teams,
L. Ant ˜ao, N. Costa, and G. Gonc ¸alves, “General purpose task and motion planning for human-robot teams,” in2022 2nd International Conference on Robotics, Automation and Artificial Intelligence (RAAI), 2022, pp. 8– 14
work page 2022
-
[12]
H. Wang and W. Chen,Simulated Annealing Algorithms for the Het- erogeneous Robots Task Scheduling Problem in Heterogeneous Robotic Order Fulfillment Systems. Springer, 01 2022, pp. 276–287
work page 2022
-
[13]
——, “Task scheduling for heterogeneous agents pickup and delivery using recurrent open shop scheduling models,”Robotics and Autonomous Systems, vol. 172, p. 104604, 2024. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0921889023002439
work page 2024
-
[14]
A general task and motion planning framework for multiple manipulators,
T. Pan, A. M. Wells, R. Shome, and L. E. Kavraki, “A general task and motion planning framework for multiple manipulators,” in2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 3168–3174
work page 2021
-
[15]
Multi- robot task and motion planning with subtask dependencies,
J. Motes, R. Sandstr ¨om, H. Lee, S. Thomas, and N. M. Amato, “Multi- robot task and motion planning with subtask dependencies,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 3338–3345, 2020
work page 2020
-
[16]
Semantic knowledge-based hierarchical planning approach for multi-robot sys- tems,
S. Bae, S. Joo, J. Choi, J. Pyo, H. Park, and T. Kuc, “Semantic knowledge-based hierarchical planning approach for multi-robot sys- tems,”Electronics, vol. 12, no. 9, 2023
work page 2023
-
[17]
T. Pan, C. K. Verginis, and L. E. Kavraki, “Robust and safe task- driven planning and navigation for heterogeneous multi-robot teams with uncertain dynamics,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 3482–3489
work page 2024
-
[18]
S. A. Bouhsain, R. Alami, and T. Sim ´eon, “Extending task and motion planning with feasibility prediction: Towards multi-robot manipulation planning of realistic objects,” in2024 IEEE/RSJ International Confer- ence on Intelligent Robots and Systems (IROS), 2024, pp. 10 318–10 325
work page 2024
-
[19]
Probabilistic roadmaps for path planning in high-dimensional configuration spaces,
L. Kavraki, P. Svestka, J.-C. Latombe, and M. Overmars, “Probabilistic roadmaps for path planning in high-dimensional configuration spaces,” IEEE Transactions on Robotics and Automation, vol. 12, no. 4, pp. 566– 580, 1996
work page 1996
-
[20]
Rapidly-exploring random trees : a new tool for path planning,
S. M. LaValle, “Rapidly-exploring random trees : a new tool for path planning,”The annual research report, 1998
work page 1998
-
[21]
A unified sampling-based approach to integrated task and motion planning,
W. Thomason and R. Knepper, “A unified sampling-based approach to integrated task and motion planning,” 06 2019
work page 2019
-
[22]
Benchmark of sampling based motion planners in bin picking manipulation task,
S. Realpe, F. G. Roldan, J. M. Fajardo, J. D. Hern ´andez, and P.- F. Cardenas, “Benchmark of sampling based motion planners in bin picking manipulation task,” in2022 27th International Conference on Automation and Computing (ICAC), 2022, pp. 1–6
work page 2022
-
[23]
Guided sampling-based motion planning with dynamics in unknown environments,
A. Khanal, H.-D. Bui, G. J. Stein, and E. Plaku, “Guided sampling-based motion planning with dynamics in unknown environments,” 2023
work page 2023
-
[24]
J. Ortiz-Haro, W. H ¨onig, V . N. Hartmann, M. Toussaint, and L. Righetti, “idb-rrt: Sampling-based kinodynamic motion planning with motion primitives and trajectory optimization,” 2024
work page 2024
-
[25]
A dataset generation tool for deep learning-based motion planning in complex environments,
M. U. Sarwar, M. Sohail, M. U. Din, J. Rosell, and W. M. Qazi, “A dataset generation tool for deep learning-based motion planning in complex environments,” in2021 26th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA ), 2021, pp. 1–4
work page 2021
-
[26]
F. Noroozi, M. Daneshmand, and P. Fiorini, “Conventional, heuristic and learning-based robot motion planning: Reviewing frameworks of current practical significance,”Machines, vol. 11, no. 7, 2023
work page 2023
-
[27]
Multi-point path planning for robots based on deep reinforce- ment learning,
Z. Fan, “Multi-point path planning for robots based on deep reinforce- ment learning,”Journal of Physics: Conference Series, vol. 2580, no. 1, p. 012048, sep 2023
work page 2023
-
[28]
OctoMap: An efficient probabilistic 3D mapping framework based on octrees,
A. Hornung, K. M. Wurm, M. Bennewitz, C. Stachniss, and W. Burgard, “OctoMap: An efficient probabilistic 3D mapping framework based on octrees,”Autonomous Robots, 2013
work page 2013
-
[29]
R. Bernardo, J. M. Sousa, and P. J. Gonc ¸alves, “A novel framework to improve motion planning of robotic systems through semantic knowledge-based reasoning,”Computers & Industrial Engineering, vol. 182, p. 109345, 2023
work page 2023
-
[30]
What is yolov8? the ultimate guide,
F. Jacob Solawetz, “What is yolov8? the ultimate guide,” https://blog. roboflow.com/whats-new-in-yolov8/, 2024, accessed:5 September 2024
work page 2024
-
[31]
Multi- robot task planning for efficient battery disassembly in electric vehicles,
C. Erdogan, C. A. Contreras, R. Stolkin, and A. Rastegarpanah, “Multi- robot task planning for efficient battery disassembly in electric vehicles,” Robotics, vol. 13, no. 5, 2024
work page 2024
-
[32]
J. Hathaway, C. A. Contreras, M. E. Asif, R. Stolkin, and A. Raste- garpanah, “Technoeconomic assessment of electric vehicle battery disassembly-challenges and opportunities from a robotics perspective,” IEEE Access, vol. 13, pp. 716–733, 2025
work page 2025
-
[33]
Task-aware motion planning in constrained environments using gmm-informed rrt planners,
A. Shaarawy, A. Rastegarpanah, and R. Stolkin, “Task-aware motion planning in constrained environments using gmm-informed rrt planners,” Robotics and Computer-Integrated Manufacturing, vol. 97, p. 103095, 2026
work page 2026
-
[34]
J. Hathaway, A. Shaarawy, C. Akdeniz, A. Aflakian, R. Stolkin, and A. Rastegarpanah, “Towards reuse and recycling of lithium-ion batteries: Tele-robotics for disassembly of electric vehicle batteries,”Frontiers in Robotics and AI, vol. 10, p. 1179296, 2023
work page 2023
-
[35]
The Open Motion Planning Library,
I. A. S ¸ucan, M. Moll, and L. E. Kavraki, “The Open Motion Planning Library,”IEEE Robotics & Automation Magazine, vol. 19, no. 4, pp. 72–82, December 2012
work page 2012
-
[36]
Vision-guided mpc for robotic path following using learned memory-augmented model,
A. Rastegarpanah, J. Hathaway, and R. Stolkin, “Vision-guided mpc for robotic path following using learned memory-augmented model,” Frontiers in Robotics and AI, vol. 8, p. 688275, 2021
work page 2021
-
[37]
M. Togai, “An application of the singular value decomposition to manipulability and sensitivity of industrial robots,”SIAM Journal on Algebraic Discrete Methods, vol. 7, no. 2, pp. 315–320, 1986. Abdelaziz Shaarawyis a PhD candidate at the Extreme Robotics Lab, University of Birmingham. He received his B.Sc. degree in Mechatronics from Nile University, an...
work page 1986
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.