MoveFM-R: Advancing Mobility Foundation Models via Language-driven Semantic Reasoning
Pith reviewed 2026-05-18 13:12 UTC · model grok-4.3
The pith
MoveFM-R generates realistic human movement trajectories from natural language instructions by combining mobility statistics with language reasoning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
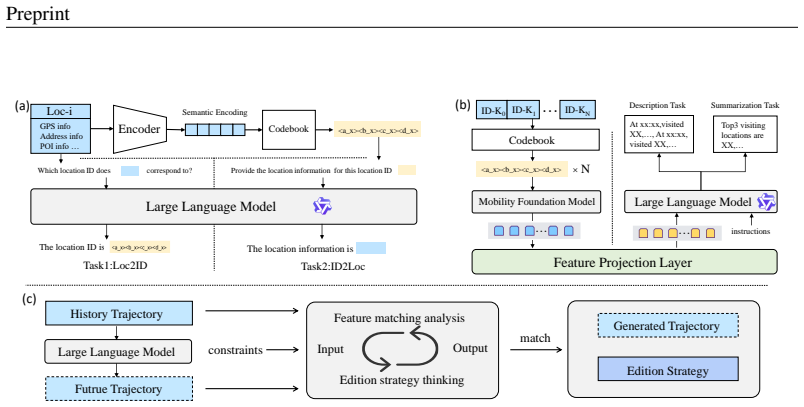
MoveFM-R unlocks better mobility modeling by synthesizing the statistical strengths of mobility foundation models with the semantic capabilities of large language models. It does so via a semantically enhanced location encoding that resolves the mismatch between continuous coordinates and discrete language tokens, a progressive curriculum that aligns reasoning with observed mobility patterns, and an interactive self-reflection mechanism that supports conditional trajectory generation from text instructions.
What carries the argument
Semantically enhanced location encoding that converts continuous geographic coordinates into discrete tokens usable by language models while retaining essential spatio-temporal movement statistics.
If this is right
- MoveFM-R significantly outperforms both mobility foundation model baselines and language model baselines on trajectory generation tasks.
- The approach shows strong generalization when tested in zero-shot settings with no task-specific training examples.
- It produces more realistic trajectories when given natural language instructions compared to earlier methods.
- The combination enables conditional generation where text descriptions directly control output paths.
Where Pith is reading between the lines
- Such models could support navigation tools that accept spoken or written plans instead of requiring exact addresses or coordinates.
- Urban planners might use the system to simulate effects of new policies by describing scenarios in plain language and observing resulting movement patterns.
- The method may extend to other domains like logistics where routes must be derived from textual constraints while respecting physical limits.
Load-bearing premise
The encoding step successfully connects geographic data to language tokens without losing the real-world patterns of travel times and distances needed for plausible paths.
What would settle it
Generate trajectories from instructions in an entirely new geographic area and check whether the resulting paths violate basic physical constraints such as maximum human walking or driving speeds observed in independent real-world data sets.
Figures

read the original abstract
Mobility Foundation Models (MFMs) have advanced the modeling of human movement patterns, yet they face a ceiling due to limitations in data scale and semantic understanding. While Large Language Models (LLMs) offer powerful semantic reasoning, they lack the innate understanding of spatio-temporal statistics required for generating physically plausible mobility trajectories. To address these gaps, we propose MoveFM-R, a novel framework that unlocks the full potential of mobility foundation models by leveraging language-driven semantic reasoning capabilities. It tackles two key challenges: the vocabulary mismatch between continuous geographic coordinates and discrete language tokens, and the representation gap between the latent vectors of MFMs and the semantic world of LLMs. MoveFM-R is built on three core innovations: a semantically enhanced location encoding to bridge the geography-language gap, a progressive curriculum to align the LLM's reasoning with mobility patterns, and an interactive self-reflection mechanism for conditional trajectory generation. Extensive experiments demonstrate that MoveFM-R significantly outperforms existing MFM-based and LLM-based baselines. It also shows robust generalization in zero-shot settings and excels at generating realistic trajectories from natural language instructions. By synthesizing the statistical power of MFMs with the deep semantic understanding of LLMs, MoveFM-R pioneers a new paradigm that enables a more comprehensive, interpretable, and powerful modeling of human mobility. The implementation of MoveFM-R is available online at https://anonymous.4open.science/r/MoveFM-R-CDE7/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents MoveFM-R, a framework integrating Mobility Foundation Models (MFMs) with Large Language Models (LLMs) via language-driven semantic reasoning. It introduces three innovations: semantically enhanced location encoding to bridge continuous geographic coordinates with discrete language tokens, a progressive curriculum to align LLM reasoning with mobility patterns, and an interactive self-reflection mechanism for conditional trajectory generation from natural language instructions. The authors claim that extensive experiments demonstrate significant outperformance over MFM-based and LLM-based baselines, robust zero-shot generalization, and the generation of realistic trajectories.
Significance. If the results hold, this work would advance mobility modeling by synthesizing the statistical strengths of MFMs with the semantic capabilities of LLMs, enabling more interpretable and controllable trajectory generation. The open-source implementation supports reproducibility. This addresses key limitations in data scale/semantic understanding for MFMs and spatio-temporal grounding for LLMs, with potential applications in urban planning and transportation.
major comments (2)
- [Section 3.1] Section 3.1 (semantically enhanced location encoding): The central claim that this encoding bridges the vocabulary mismatch while preserving essential spatio-temporal statistics (visit frequencies, speed distributions, spatial correlations) lacks any quantitative validation such as KL divergence, Kolmogorov-Smirnov tests, or marginal distribution comparisons between original and encoded trajectories. This is load-bearing for the physical plausibility of generated trajectories and the reliability of all downstream comparisons.
- [Section 4] Section 4 (experiments): The abstract and framework description assert significant outperformance, zero-shot robustness, and realistic trajectory generation, yet no specific metrics, dataset details, baseline implementations, ablation results, or statistical significance tests are referenced. Without these, the magnitude and validity of the claimed gains over MFM and LLM baselines cannot be assessed.
minor comments (1)
- The code availability link is provided as anonymous; updating it to a permanent repository upon acceptance would improve accessibility.
Simulated Author's Rebuttal
We thank the referee for their detailed and constructive feedback on our work. We have addressed each of the major comments point-by-point below, providing clarifications and committing to revisions that strengthen the manuscript without altering its core contributions.
read point-by-point responses
-
Referee: [Section 3.1] Section 3.1 (semantically enhanced location encoding): The central claim that this encoding bridges the vocabulary mismatch while preserving essential spatio-temporal statistics (visit frequencies, speed distributions, spatial correlations) lacks any quantitative validation such as KL divergence, Kolmogorov-Smirnov tests, or marginal distribution comparisons between original and encoded trajectories. This is load-bearing for the physical plausibility of generated trajectories and the reliability of all downstream comparisons.
Authors: We agree that quantitative validation of the encoding's preservation of spatio-temporal statistics would strengthen the claims. Section 3.1 describes the encoding mechanism designed to maintain these properties via semantic tokenization aligned with geographic and frequency data. However, explicit statistical tests were not included. In the revised version, we will add quantitative analyses, including KL divergence for visit frequencies, KS tests for speed distributions, and spatial correlation comparisons, supported by figures or tables in Section 3.1. revision: yes
-
Referee: [Section 4] Section 4 (experiments): The abstract and framework description assert significant outperformance, zero-shot robustness, and realistic trajectory generation, yet no specific metrics, dataset details, baseline implementations, ablation results, or statistical significance tests are referenced. Without these, the magnitude and validity of the claimed gains over MFM and LLM baselines cannot be assessed.
Authors: The experimental details are provided in Section 4, including metrics for trajectory quality, dataset descriptions, baseline setups, and ablation studies demonstrating the contributions of each component. To address the concern about referencing, we will update the abstract to highlight key quantitative results and include a consolidated table in Section 4 summarizing all metrics, baselines, ablation outcomes, and statistical significance tests (e.g., using t-tests). This will make the outperformance claims more transparent and verifiable. revision: yes
Circularity Check
No circularity: framework introduces independent architectural components
full rationale
The paper's derivation rests on three explicitly novel components (semantically enhanced location encoding, progressive curriculum, and interactive self-reflection) that are defined and motivated independently of the target performance metrics. Claims of outperformance and zero-shot generalization are tied to experimental results rather than any redefinition of inputs as outputs or load-bearing self-citations. No equations or steps reduce by construction to fitted parameters or prior self-referential results; the central representation choices are presented as new bridges between continuous geography and discrete tokens without presupposing the downstream trajectory statistics they are later evaluated on.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
semantically enhanced location encoding to discretize continuous coordinates into a set of compact, interpretable tokens... Residual Quantized Variational Autoencoder (RQ-VAE)
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat recovery unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
progressive curriculum... description-to-summarization... self-reflective reinforcement learning
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION format.date year duplicate empty "emp...
-
[2]
Albatross: multiagent, rule-based model of activity pattern decisions
Theo Arentze, Frank Hofman, Henk Van Mourik, and Harry Timmermans. Albatross: multiagent, rule-based model of activity pattern decisions. Transportation Research Record, 1706 0 (1): 0 136--144, 2000
work page 2000
-
[3]
Activity-based disaggregate travel demand model system with activity schedules
John L Bowman and Moshe E Ben-Akiva. Activity-based disaggregate travel demand model system with activity schedules. Transportation research part a: policy and practice, 35 0 (1): 0 1--28, 2001
work page 2001
-
[4]
Deep learning for trajectory data management and mining: A survey and beyond
Wei Chen, Yuxuan Liang, Yuanshao Zhu, Yanchuan Chang, Kang Luo, Haomin Wen, Lei Li, Yanwei Yu, Qingsong Wen, Chao Chen, et al. Deep learning for trajectory data management and mining: A survey and beyond. arXiv preprint arXiv:2403.14151, 2024
-
[5]
Enhancing large language models for mobility analytics with semantic location tokenization
Yile Chen, Yicheng Tao, Yue Jiang, Shuai Liu, Han Yu, and Gao Cong. Enhancing large language models for mobility analytics with semantic location tokenization. In Proceedings of the 31st ACM SIGKDD Conference on Knowledge Discovery and Data Mining V. 2, pp.\ 262--273, 2025
work page 2025
-
[6]
Lg-traj: Llm guided pedestrian trajectory prediction
Pranav Singh Chib and Pravendra Singh. Lg-traj: Llm guided pedestrian trajectory prediction. arXiv preprint arXiv:2403.08032, 2024
-
[7]
Trajgdm: A new trajectory foundation model for simulating human mobility
Chen Chu, Hengcai Zhang, and Feng Lu. Trajgdm: A new trajectory foundation model for simulating human mobility. In Proceedings of the 31st ACM International Conference on Advances in Geographic Information Systems, pp.\ 1--2, 2023
work page 2023
-
[8]
Word association norms, mutual information, and lexicography
Kenneth Church and Patrick Hanks. Word association norms, mutual information, and lexicography. Computational linguistics, 16 0 (1): 0 22--29, 1990
work page 1990
-
[9]
Bangchao Deng, Ling Ding, Lianhua Ji, Chunhua Chen, Xin Jing, Bingqing Qu, and Dingqi Yang. Marionette: Fine-grained conditional generative modeling of spatiotemporal human trajectory data beyond imitation. In Proceedings of the 31st ACM SIGKDD Conference on Knowledge Discovery and Data Mining V. 2, pp.\ 463--473, 2025
work page 2025
-
[10]
Deepmove: Predicting human mobility with attentional recurrent networks
Jie Feng, Yong Li, Chao Zhang, Funing Sun, Fanchao Meng, Ang Guo, and Depeng Jin. Deepmove: Predicting human mobility with attentional recurrent networks. In Proceedings of the 2018 world wide web conference, pp.\ 1459--1468, 2018
work page 2018
-
[11]
Letian Gong, Yan Lin, Xinyue Zhang, Yiwen Lu, Xuedi Han, Yichen Liu, Shengnan Guo, Youfang Lin, and Huaiyu Wan. Mobility-llm: Learning visiting intentions and travel preference from human mobility data with large language models. Advances in Neural Information Processing Systems, 37: 0 36185--36217, 2024
work page 2024
-
[12]
Understanding individual human mobility patterns
Marta C Gonzalez, Cesar A Hidalgo, and Albert-Laszlo Barabasi. Understanding individual human mobility patterns. nature, 453 0 (7196): 0 779--782, 2008
work page 2008
-
[13]
Trajmoe: Spatially-aware mixture of experts for unified human mobility modeling
Chonghua Han, Yuan Yuan, Kaiyan Chen, Jingtao Ding, and Yong Li. Trajmoe: Spatially-aware mixture of experts for unified human mobility modeling. arXiv preprint arXiv:2505.18670, 2025
-
[14]
Mohammad Hashemi and Andreas Zufle. From points to places: Towards human mobility-driven spatiotemporal foundation models via understanding places. arXiv preprint arXiv:2506.14570, 2025
-
[15]
Lora: Low-rank adaptation of large language models
Edward J Hu, Yelong Shen, Phillip Wallis, Zeyuan Allen-Zhu, Yuanzhi Li, Shean Wang, Lu Wang, Weizhu Chen, et al. Lora: Low-rank adaptation of large language models. ICLR, 1 0 (2): 0 3, 2022
work page 2022
-
[16]
Binyuan Hui, Jian Yang, Zeyu Cui, Jiaxi Yang, Dayiheng Liu, Lei Zhang, Tianyu Liu, Jiajun Zhang, Bowen Yu, Keming Lu, et al. Qwen2. 5-coder technical report. arXiv preprint arXiv:2409.12186, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[17]
Trajllm: A modular llm-enhanced agent-based framework for realistic human trajectory simulation
Chenlu Ju, Jiaxin Liu, Shobhit Sinha, Hao Xue, and Flora Salim. Trajllm: A modular llm-enhanced agent-based framework for realistic human trajectory simulation. In Companion Proceedings of the ACM on Web Conference 2025, pp.\ 2847--2850, 2025
work page 2025
-
[18]
From specialized trajectory models to trajectory foundation models: Advancements and prospects
LIU Kang. From specialized trajectory models to trajectory foundation models: Advancements and prospects. Journal of Geo-information Science, 27 0 (7): 0 1520, 2025. doi:10.12082/dqxxkx.2025.250196. URL https://www.dqxxkx.cn/EN/10.12082/dqxxkx.2025.250196
-
[19]
Location-based social network data generation based on patterns of life
Joon-Seok Kim, Hyunjee Jin, Hamdi Kavak, Ovi Chris Rouly, Andrew Crooks, Dieter Pfoser, Carola Wenk, and Andreas Z \"u fle. Location-based social network data generation based on patterns of life. In 2020 21st IEEE International Conference on Mobile Data Management (MDM), pp.\ 158--167. IEEE, 2020
work page 2020
-
[20]
Ryuichi Kitamura, Eric I Pas, Clarisse V Lula, T Keith Lawton, and Paul E Benson. The sequenced activity mobility simulator (sams): an integrated approach to modeling transportation, land use and air quality. Transportation, 23 0 (3): 0 267--291, 1996
work page 1996
-
[21]
Locationreasoner: Evaluating llms on real-world site selection reasoning
Miho Koda, Yu Zheng, Ruixian Ma, Mingyang Sun, Devesh Pansare, Fabio Duarte, and Paolo Santi. Locationreasoner: Evaluating llms on real-world site selection reasoning. arXiv preprint arXiv:2506.13841, 2025
-
[22]
Zhengxing Lan, Lingshan Liu, Bo Fan, Yisheng Lv, Yilong Ren, and Zhiyong Cui. Traj-llm: A new exploration for empowering trajectory prediction with pre-trained large language models. IEEE Transactions on Intelligent Vehicles, 2024
work page 2024
-
[23]
Autoregressive image generation using residual quantization
Doyup Lee, Chiheon Kim, Saehoon Kim, Minsu Cho, and Wook-Shin Han. Autoregressive image generation using residual quantization. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp.\ 11523--11532, 2022
work page 2022
-
[24]
Geo-llama: Leveraging llms for human mobility trajectory generation with spatiotemporal constraints
Siyu Li, Toan Tran, Haowen Lin, John Krumm, Cyrus Shahabi, Lingyi Zhao, Khurram Shafique, and Li Xiong. Geo-llama: Leveraging llms for human mobility trajectory generation with spatiotemporal constraints. arXiv preprint arXiv:2408.13918, 2024
-
[25]
Trajfm: A vehicle trajectory foundation model for region and task transferability
Yan Lin, Tonglong Wei, Zeyu Zhou, Haomin Wen, Jilin Hu, Shengnan Guo, Youfang Lin, and Huaiyu Wan. Trajfm: A vehicle trajectory foundation model for region and task transferability. arXiv preprint arXiv:2408.15251, 2024
-
[26]
nextlocllm: next location prediction using llms
Shuai Liu, Ning Cao, Yile Chen, Yue Jiang, and Gao Cong. nextlocllm: next location prediction using llms. arXiv preprint arXiv:2410.09129, 2024 a
-
[27]
Xu Liu, Juncheng Liu, Gerald Woo, Taha Aksu, Yuxuan Liang, Roger Zimmermann, Chenghao Liu, Silvio Savarese, Caiming Xiong, and Doyen Sahoo. Moirai-moe: Empowering time series foundation models with sparse mixture of experts. arXiv preprint arXiv:2410.10469, 2024 b
-
[28]
One fits all: General mobility trajectory modeling via masked conditional diffusion
Qingyue Long, Can Rong, Huandong Wang, and Yong Li. One fits all: General mobility trajectory modeling via masked conditional diffusion. arXiv preprint arXiv:2501.13347, 2025
-
[29]
A survey on deep learning for human mobility
Massimiliano Luca, Gianni Barlacchi, Bruno Lepri, and Luca Pappalardo. A survey on deep learning for human mobility. ACM Computing Surveys (CSUR), 55 0 (1): 0 1--44, 2021
work page 2021
-
[30]
Deciphering human mobility: Inferring semantics of trajectories with large language models
Yuxiao Luo, Zhongcai Cao, Xin Jin, Kang Liu, and Ling Yin. Deciphering human mobility: Inferring semantics of trajectories with large language models. In 2024 25th IEEE International Conference on Mobile Data Management (MDM), pp.\ 289--294. IEEE, 2024
work page 2024
-
[31]
Generative adversarial text to image synthesis
Scott Reed, Zeynep Akata, Xinchen Yan, Lajanugen Logeswaran, Bernt Schiele, and Honglak Lee. Generative adversarial text to image synthesis. In International conference on machine learning, pp.\ 1060--1069. Pmlr, 2016
work page 2016
-
[32]
Prompt programming for large language models: Beyond the few-shot paradigm
Laria Reynolds and Kyle McDonell. Prompt programming for large language models: Beyond the few-shot paradigm. In Extended abstracts of the 2021 CHI conference on human factors in computing systems, pp.\ 1--7, 2021
work page 2021
-
[33]
Proximal Policy Optimization Algorithms
John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. Proximal policy optimization algorithms. arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[34]
Chain-of-planned-behaviour workflow elicits few-shot mobility generation in llms
Chenyang Shao, Fengli Xu, Bingbing Fan, Jingtao Ding, Yuan Yuan, Meng Wang, and Yong Li. Chain-of-planned-behaviour workflow elicits few-shot mobility generation in llms. arXiv preprint arXiv:2402.09836, 2024 a
-
[35]
DeepSeekMath: Pushing the Limits of Mathematical Reasoning in Open Language Models
Zhihong Shao, Peiyi Wang, Qihao Zhu, Runxin Xu, Junxiao Song, Xiao Bi, Haowei Zhang, Mingchuan Zhang, YK Li, Yang Wu, et al. Deepseekmath: Pushing the limits of mathematical reasoning in open language models. arXiv preprint arXiv:2402.03300, 2024 b
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[36]
Xiaoming Shi, Shiyu Wang, Yuqi Nie, Dianqi Li, Zhou Ye, Qingsong Wen, and Ming Jin. Time-moe: Billion-scale time series foundation models with mixture of experts. arXiv preprint arXiv:2409.16040, 2024
-
[37]
Junjun Si, Jin Yang, Yang Xiang, Hanqiu Wang, Li Li, Rongqing Zhang, Bo Tu, and Xiangqun Chen. Trajbert: Bert-based trajectory recovery with spatial-temporal refinement for implicit sparse trajectories. IEEE Transactions on Mobile Computing, 23 0 (5): 0 4849--4860, 2023
work page 2023
-
[38]
P., Galley, M., Caruana, R., and Gao, J
Chandan Singh, Jeevana Priya Inala, Michel Galley, Rich Caruana, and Jianfeng Gao. Rethinking interpretability in the era of large language models. arXiv preprint arXiv:2402.01761, 2024
-
[39]
Modelling the scaling properties of human mobility
Chaoming Song, Tal Koren, Pu Wang, and Albert-L \'a szl \'o Barab \'a si. Modelling the scaling properties of human mobility. Nature physics, 6 0 (10): 0 818--823, 2010
work page 2010
-
[40]
Large language models as urban residents: An llm agent framework for personal mobility generation
Jiawei Wang, Renhe Jiang, Chuang Yang, Zengqing Wu, Makoto Onizuka, Ryosuke Shibasaki, Noboru Koshizuka, and Chuan Xiao. Large language models as urban residents: An llm agent framework for personal mobility generation. Advances in Neural Information Processing Systems, 37: 0 124547--124574, 2024
work page 2024
-
[41]
Pretrained mobility transformer: A foundation model for human mobility
Xinhua Wu, Haoyu He, Yanchao Wang, and Qi Wang. Pretrained mobility transformer: A foundation model for human mobility. arXiv preprint arXiv:2406.02578, 2024
-
[42]
An Yang, Anfeng Li, Baosong Yang, Beichen Zhang, Binyuan Hui, Bo Zheng, Bowen Yu, Chang Gao, Chengen Huang, Chenxu Lv, et al. Qwen3 technical report. arXiv preprint arXiv:2505.09388, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[43]
Getnext: Trajectory flow map enhanced transformer for next poi recommendation
Song Yang, Jiamou Liu, and Kaiqi Zhao. Getnext: Trajectory flow map enhanced transformer for next poi recommendation. In Proceedings of the 45th International ACM SIGIR Conference on research and development in information retrieval, pp.\ 1144--1153, 2022
work page 2022
-
[44]
Learning to simulate daily activities via modeling dynamic human needs
Yuan Yuan, Huandong Wang, Jingtao Ding, Depeng Jin, and Yong Li. Learning to simulate daily activities via modeling dynamic human needs. In Proceedings of the ACM Web Conference 2023, pp.\ 906--916, 2023
work page 2023
-
[45]
Learning the complexity of urban mobility with deep generative network
Yuan Yuan, Jingtao Ding, Depeng Jin, and Yong Li. Learning the complexity of urban mobility with deep generative network. PNAS nexus, 4 0 (5): 0 pgaf081, 2025
work page 2025
-
[46]
Qwen3 Embedding: Advancing Text Embedding and Reranking Through Foundation Models
Yanzhao Zhang, Mingxin Li, Dingkun Long, Xin Zhang, Huan Lin, Baosong Yang, Pengjun Xie, An Yang, Dayiheng Liu, Junyang Lin, et al. Qwen3 embedding: Advancing text embedding and reranking through foundation models. arXiv preprint arXiv:2506.05176, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[47]
Urban mobility foundation model: A literature review and hierarchical perspective
Zhen Zhou, Ziyuan Gu, Xiaobo Qu, Pan Liu, Zhiyuan Liu, and Wenwu Yu. Urban mobility foundation model: A literature review and hierarchical perspective. Transportation Research Part E: Logistics and Transportation Review, 192: 0 103795, 2024
work page 2024
-
[48]
Difftraj: Generating gps trajectory with diffusion probabilistic model
Yuanshao Zhu, Yongchao Ye, Shiyao Zhang, Xiangyu Zhao, and James Yu. Difftraj: Generating gps trajectory with diffusion probabilistic model. Advances in Neural Information Processing Systems, 36: 0 65168--65188, 2023
work page 2023
-
[49]
Controltraj: Controllable trajectory generation with topology-constrained diffusion model
Yuanshao Zhu, James Jianqiao Yu, Xiangyu Zhao, Qidong Liu, Yongchao Ye, Wei Chen, Zijian Zhang, Xuetao Wei, and Yuxuan Liang. Controltraj: Controllable trajectory generation with topology-constrained diffusion model. In Proceedings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining, pp.\ 4676--4687, 2024 a
work page 2024
-
[50]
Unitraj: Learning a universal trajectory foundation model from billion-scale worldwide traces
Yuanshao Zhu, James Jianqiao Yu, Xiangyu Zhao, Xuetao Wei, and Yuxuan Liang. Unitraj: Learning a universal trajectory foundation model from billion-scale worldwide traces. arXiv preprint arXiv:2411.03859, 2024 b
-
[51]
\@ifxundefined[1] #1\@undefined \@firstoftwo \@secondoftwo \@ifnum[1] #1 \@firstoftwo \@secondoftwo \@ifx[1] #1 \@firstoftwo \@secondoftwo [2] @ #1 \@temptokena #2 #1 @ \@temptokena \@ifclassloaded agu2001 natbib The agu2001 class already includes natbib coding, so you should not add it explicitly Type <Return> for now, but then later remove the command n...
-
[52]
\@lbibitem[] @bibitem@first@sw\@secondoftwo \@lbibitem[#1]#2 \@extra@b@citeb \@ifundefined br@#2\@extra@b@citeb \@namedef br@#2 \@nameuse br@#2\@extra@b@citeb \@ifundefined b@#2\@extra@b@citeb @num @parse #2 @tmp #1 NAT@b@open@#2 NAT@b@shut@#2 \@ifnum @merge>\@ne @bibitem@first@sw \@firstoftwo \@ifundefined NAT@b*@#2 \@firstoftwo @num @NAT@ctr \@secondoft...
-
[53]
"ů3 `T H Aez x_np/ //2 ß ![ԧ b RXk ,V
@open @close @open @close and [1] URL: #1 \@ifundefined chapter * \@mkboth \@ifxundefined @sectionbib * \@mkboth * \@mkboth\@gobbletwo \@ifclassloaded amsart * \@ifclassloaded amsbook * \@ifxundefined @heading @heading NAT@ctr thebibliography [1] @ \@biblabel @NAT@ctr \@bibsetup #1 @NAT@ctr @ @openbib .11em \@plus.33em \@minus.07em 4000 4000 `\.\@m @bibit...
work page 1999
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.