General formulation of an analytic, Lipschitz continuous control allocation for thrust-vectored controlled rigid-bodies
Pith reviewed 2026-05-18 08:55 UTC · model grok-4.3
The pith
A general framework solves the control allocation problem for thrust-vectored rigid bodies using a closed-form Lipschitz continuous mapping that handles any number of thrusters.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that the control allocation problem for thrust-vectored controlled rigid-bodies with an arbitrary number of thrusters admits a general analytic solution in the form of a closed-form, Lipschitz continuous mapping from the desired wrench to actuator references, along with a convex optimization version that incorporates actuator constraints, both of which exploit the nullspace structure to achieve singularity avoidance while producing practical sub-optimal allocations.
What carries the argument
The nullspace structure of the allocation mapping, which allows adjustments to the solution to avoid singularities while preserving the net force and torque output.
If this is right
- The framework applies without change to systems with any number of thrusters.
- The closed-form solution produces continuously varying actuator orientations.
- The optimization version directly enforces thrust saturation and angular rate limits.
- Both approaches yield usable solutions even when perfect optimality is not required.
- Effectiveness is shown in examples with a marine vessel and a quadcopter.
Where Pith is reading between the lines
- This approach may reduce the complexity of designing high-level controllers by providing a reliable low-level allocator.
- Similar nullspace techniques could be tested on other types of over-actuated systems beyond thrust vectoring.
- Hardware experiments could verify whether the smoothness from the Lipschitz mapping improves overall system performance.
Load-bearing premise
The nullspace of the allocation mapping can be used to avoid singularities while still producing sub-optimal but practical solutions that work for any number of thrusters and respect actuator constraints.
What would settle it
A numerical test case with a specific rigid body and thruster configuration where the proposed mapping either produces non-Lipschitz behavior, fails to avoid a detected singularity, or violates actuator limits while claiming to handle them.
Figures














read the original abstract
This paper presents a general framework for solving the control allocation problem (CAP) in thrust-vector controlled rigid-bodies with an arbitrary number of thrusters. Two novel solutions are proposed: a closed-form, Lipschitz continuous mapping that ensures smooth actuator orientation references, and a convex optimization formulation capable of handling practical actuator constraints such as thrust saturation and angular rate limits. Both methods leverage the nullspace structure of the allocation mapping to perform singularity avoidance while generating sub-optimal yet practical solutions. The effectiveness and generality of the proposed framework are demonstrated through numerical examples on a marine vessel and an aerial quadcopter.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper presents a general framework for solving the control allocation problem (CAP) in thrust-vector controlled rigid-bodies with an arbitrary number of thrusters. Two novel solutions are proposed: a closed-form, Lipschitz continuous mapping that ensures smooth actuator orientation references, and a convex optimization formulation capable of handling practical actuator constraints such as thrust saturation and angular rate limits. Both methods leverage the nullspace structure of the allocation mapping to perform singularity avoidance while generating sub-optimal yet practical solutions. The effectiveness and generality of the proposed framework are demonstrated through numerical examples on a marine vessel and an aerial quadcopter.
Significance. If the derivations and claims hold, the work supplies analytic and optimization-based control allocation methods that are Lipschitz continuous and explicitly handle actuator constraints while using nullspace projection for singularity avoidance. This could be valuable for real-time applications in aerospace and marine systems where smooth actuator commands and constraint satisfaction are required. The numerical validation on two distinct platforms (marine vessel and quadcopter) provides some evidence of generality across platforms.
major comments (1)
- [§3 and abstract] §3 (nullspace-based singularity avoidance) and the generality claim in the abstract and introduction: the framework asserts applicability to an arbitrary number of thrusters by leveraging the nullspace structure for singularity avoidance. However, when the allocation matrix has full row rank (nullspace dimension zero), which occurs for non-redundant configurations such as a minimally actuated 4-thruster vectored quadcopter, no non-trivial nullspace vector exists. In such cases the closed-form Lipschitz map and convex formulation cannot perform the claimed avoidance without either violating actuator limits or reverting to a singular solution. A explicit treatment or fallback mechanism for zero-dimensional nullspace cases is required to support the generality assertion.
minor comments (2)
- [Numerical examples section] The quadcopter numerical example should report the rank and nullspace dimension of the allocation matrix at the tested operating points to allow readers to verify that the nullspace is non-trivial.
- [Notation and §2] Notation for the allocation matrix and its nullspace basis should be introduced once and used consistently; minor inconsistencies appear between the problem formulation and the solution sections.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review of our manuscript. The major comment raises an important point about the scope of the nullspace-based singularity avoidance and the generality claim, which we address directly below.
read point-by-point responses
-
Referee: [§3 and abstract] §3 (nullspace-based singularity avoidance) and the generality claim in the abstract and introduction: the framework asserts applicability to an arbitrary number of thrusters by leveraging the nullspace structure for singularity avoidance. However, when the allocation matrix has full row rank (nullspace dimension zero), which occurs for non-redundant configurations such as a minimally actuated 4-thruster vectored quadcopter, no non-trivial nullspace vector exists. In such cases the closed-form Lipschitz map and convex formulation cannot perform the claimed avoidance without either violating actuator limits or reverting to a singular solution. A explicit treatment or fallback mechanism for zero-dimensional nullspace cases is required to support the generality assertion.
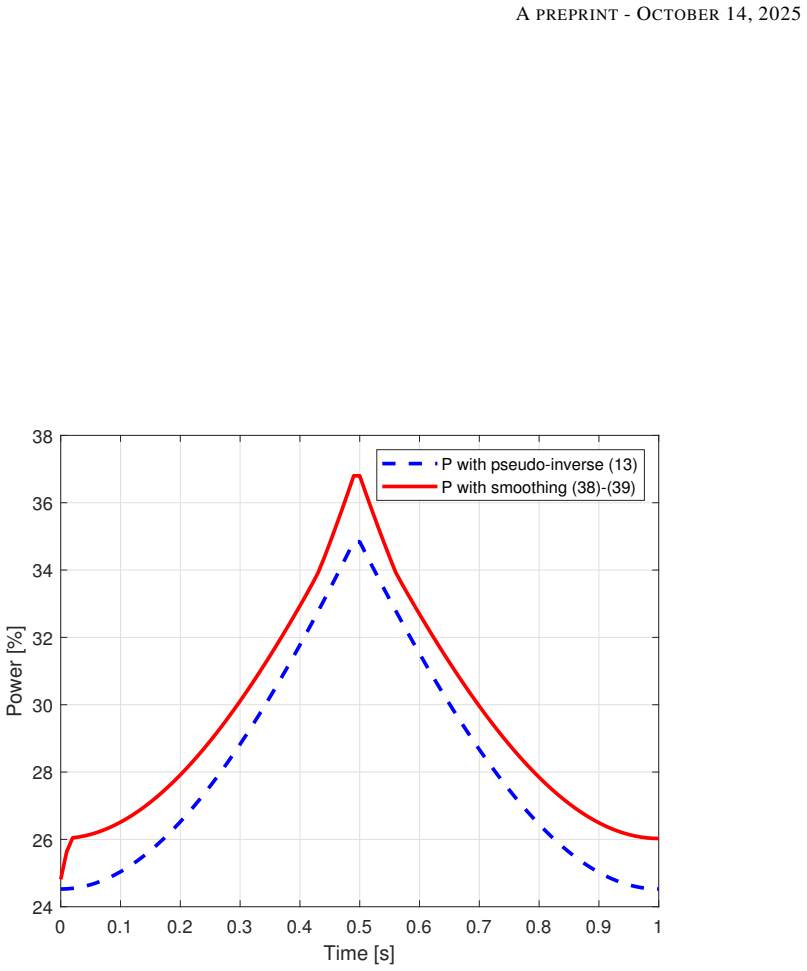
Authors: We agree that the nullspace projection technique for singularity avoidance requires a non-trivial (positive-dimensional) nullspace and therefore applies only to redundant actuator configurations. In non-redundant cases where the allocation matrix has full row rank, no such projection is available, and the closed-form mapping reduces to the (unique) particular solution while the convex formulation would need supplementary regularization to mitigate singularities. Although the numerical examples employ vectored thrusters that introduce additional degrees of freedom and thereby redundancy, the manuscript's claim of applicability to an arbitrary number of thrusters includes potentially non-redundant setups. To resolve this and strengthen the generality statement, we will revise §3 to provide an explicit discussion of the zero-dimensional nullspace case together with a fallback mechanism (e.g., regularized pseudo-inverse or constraint relaxation) that preserves Lipschitz continuity. Corresponding qualifications will be added to the abstract and introduction. This revision directly addresses the referee's concern. revision: yes
Circularity Check
No circularity: derivation applies standard nullspace concepts to a new allocation mapping without self-definition or fitted predictions.
full rationale
The paper's central results are a closed-form Lipschitz continuous mapping and a convex optimization formulation for the control allocation problem. Both are constructed by applying standard linear-algebra nullspace projections to the allocation matrix of a thrust-vectored rigid body. No equation or step in the abstract or described framework reduces a claimed prediction or first-principles result to a fitted parameter or to a self-referential definition. The methods remain independent of the target singularity-avoidance outcome; they simply reuse the existing nullspace of the allocation map. The derivation is therefore self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
F = M† τd + z with z ∈ Ker{M} to ensure Lipschitz continuity of actuator orientations ˆFj
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Thor I. Fossen and Tor A. Johansen. A Survey of Control Allocation Methods for Ships and Underwater Vehicles. In2006 14th Mediterranean Conference on Control and Automation, pages 1–6, June 2006
work page 2006
-
[2]
Wayne C. Durham. Constrained control allocation.Journal of Guidance, Control, and Dynamics, 16(4):717–725, July 1993. Publisher: American Institute of Aeronautics and Astronautics
work page 1993
-
[3]
Kenneth A. Bordingnon and Wayne C. Durham. Closed-form solutions to constrained control allocation problem. Journal of Guidance, Control, and Dynamics, 18(5):1000–1007, September 1995. Publisher: American Institute of Aeronautics and Astronautics
work page 1995
-
[4]
Virginia Polytechnic Institute and State University, 1996
Kenneth Anthony Bordignon.Constrained control allocation for systems with redundant control effectors. Virginia Polytechnic Institute and State University, 1996
work page 1996
-
[5]
Kenneth Bordignon and Wayne Durham.Null-space augmented solutions to constrained control allocation problems. AIAA 1995-3209. Guidance, Navigation, and Control Conference, August 1995
work page 1995
- [6]
-
[7]
Tor Arne Johansen, Thor I Fossen, and Stig P Berge. Constrained nonlinear control allocation with singularity avoidance using sequential quadratic programming.IEEE Transactions on Control Systems Technology, 12(1):211– 216, 2004
work page 2004
-
[8]
Eivind Ruth, Asgeir J Sørensen, and Tristan Perez. Thrust allocation with linear constrained quadratic cost function.IF AC Proceedings V olumes, 40(17):337–342, 2007
work page 2007
- [9]
-
[10]
Francesco Scibilia and Roger Skjetne. Constrained Control Allocation for Vessels with Azimuth Thrusters.IF AC Proceedings V olumes, 45(27):7–12, January 2012
work page 2012
-
[11]
Aleksander Veksler, Tor Arne Johansen, Francesco Borrelli, and Bjørnar Realfsen. Cartesian thrust allocation algorithm with variable direction thrusters, turn rate limits and singularity avoidance. In2014 IEEE Conference on Control Applications (CCA), pages 917–922, 2014
work page 2014
-
[12]
Tobias R. Torben, Astrid H. Brodtkorb, and Asgeir J. Sørensen. Control Allocation for Double-ended Ferries with Full-scale Experimental Results.International Journal of Control, Automation and Systems, 18(3):556–563, March 2020
work page 2020
-
[13]
Robert Skulstad, Guoyuan Li, Thor I. Fossen, and Houxiang Zhang. Constrained control allocation for dynamic ship positioning using deep neural network.Ocean Engineering, 279:114434, July 2023
work page 2023
-
[14]
Constrained nonlinear control allocation based on deep auto-encoder neural networks
Huang Huan, Wei Wan, Chunling We, and Yingzi He. Constrained nonlinear control allocation based on deep auto-encoder neural networks. In2018 European Control Conference (ECC), pages 1–8, 2018
work page 2018
-
[15]
Mou Chen. Constrained control allocation for overactuated aircraft using a neurodynamic model.IEEE Transac- tions on Systems, Man, and Cybernetics: Systems, 46(12):1630–1641, December 2016
work page 2016
-
[16]
Nguyen, Kenji Hirata, and Kyoungseok Han
Tam W. Nguyen, Kenji Hirata, and Kyoungseok Han. A Nullspace-Based Predictive Control Allocation for the Control of a Quadcopter Manipulating an Object Attached to the Ground.IF AC-PapersOnLine, 56(2):6286–6291, January 2023
work page 2023
-
[17]
US type azimuthing thruster - kongsberg maritime
Kongsberg. US type azimuthing thruster - kongsberg maritime. https://www.kongsberg.com/maritime/ products/propulsors-and-propulsion-systems/thrusters/us-azimuthing-thruster/. 18 APREPRINT- OCTOBER14, 2025
work page 2025
-
[18]
Xiaocheng Liu, Zhihuan Hu, Ziheng Yang, and Weidong Zhang. Real-time control allocation for autonomous surface vehicle using constrained quadratic programming.Guidance, Navigation and Control, 01(04):2140007, 2021
work page 2021
-
[19]
Wei Yushi, Mingyu Fu, Jipeng Ning, and Xingyan Sun. Quadratic programming thrust allocation and management for dynamic positioning ships.TELKOMNIKA Indonesian Journal of Electrical Engineering, 11, 01 2013
work page 2013
-
[20]
Tor A. Johansen, Thor I. Fossen, and Petter Tøndel. Efficient Optimal Constrained Control Allocation via Multiparametric Programming.Journal of Guidance, Control, and Dynamics, 28(3):506–515, 2005. Publisher: American Institute of Aeronautics and Astronautics _eprint: https://doi.org/10.2514/1.10780
-
[21]
Frank Mukwege and Emanuele Garone. On the continuity of control allocation for surface vessels with two azimuth thrusters.Ocean Engineering, 287:115813, 2023
work page 2023
-
[22]
Clarke.Optimization and Nonsmooth Analysis
Frank H. Clarke.Optimization and Nonsmooth Analysis. Classics in Applied Mathematics. Springer, New York, 2nd edition edition, 1990
work page 1990
-
[23]
Kernelizing pls, degrees of freedom, and efficient model selection
Nils Kraemer and M L Braun. Kernelizing pls, degrees of freedom, and efficient model selection. InProceedings of the 24th International Conference on Machine Learning, pages 441–448. Omni Press, 2007
work page 2007
-
[24]
Nils Kraemer and Masashi Sugiyama. The degrees of freedom of partial least squares regression.Journal of the American Statistical Association, 106(494):697–705, 2011
work page 2011
-
[25]
Andreas B. Martinsen, Anastasios M. Lekkas, and Sebastien Gros. Autonomous docking using direct optimal control.IF AC-PapersOnLine, 52(21):97–102, January 1 2019
work page 2019
-
[26]
Tor A. Johansen and Thor I. Fossen. Control allocation—A survey.Automatica, 49(5):1087–1103, May 2013
work page 2013
-
[27]
Thor I. Fossen. MSS (Marine Systems Simulator), January 2023. original-date: 2018-10-04T05:12:18Z
work page 2023
-
[28]
Thor Fossen.Handbook of Marine Craft Hydrodynamics and Motion Control. 05 2011
work page 2011
- [29]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.