Flow-Opt: Scalable Centralized Multi-Robot Trajectory Optimization with Flow Matching and Differentiable Optimization
Pith reviewed 2026-05-18 08:11 UTC · model grok-4.3
The pith
A flow-matching model with a differentiable safety filter makes centralized planning for tens of robots feasible in tens of milliseconds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Flow-Opt reduces the centralized multi-robot trajectory optimization problem to learning a flow-matching generative model that samples candidate trajectories using a diffusion transformer augmented with permutation-invariant robot position and map encoders, followed by a learned Safety-Filter equipped with a custom solver and a neural network that predicts context-specific initializations in a self-supervised manner. This combination generates trajectories for tens of robots in cluttered environments within a few tens of milliseconds, several times faster than prior centralized optimizers, while also producing smoother trajectories orders of magnitude faster than diffusion-model baselines. B
What carries the argument
Flow-matching generative model using a diffusion transformer with permutation-invariant encoders, paired with a custom differentiable Safety-Filter solver and a self-supervised initialization network.
If this is right
- Trajectories for tens of robots in cluttered environments can be generated in a few tens of milliseconds.
- The method runs several times faster than existing centralized optimization approaches.
- Smoother trajectories are produced orders of magnitude faster than diffusion-model baselines.
- A few tens of independent planning problems can be solved in a fraction of a second through batching.
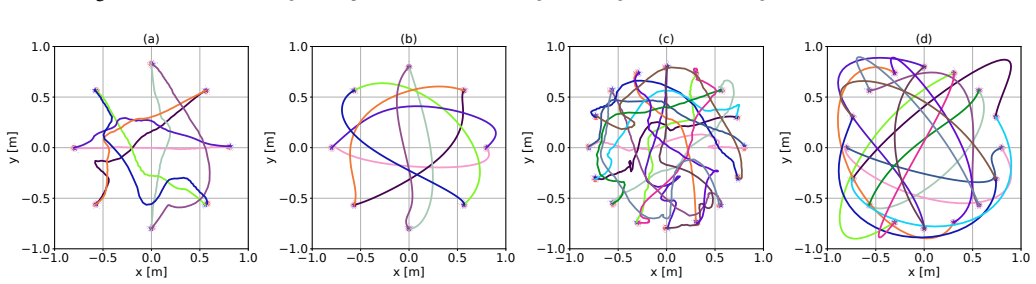
- Diverse trajectory sets that capture different collision-avoidance behaviors can be generated between fixed start and goal locations.
Where Pith is reading between the lines
- The speed and batching properties could support closed-loop replanning for teams of robots moving through changing environments.
- The same generative-plus-filter structure might transfer to other high-dimensional planning tasks such as coordinated manipulation with multiple arms.
- Physical-robot experiments would be needed to check whether the reported inference times survive sensor noise and actuator limits.
- If the safety filter can be made to accept additional cost terms, the approach could incorporate secondary objectives like energy use without losing its speed advantage.
Load-bearing premise
The learned generative model together with the safety filter will produce collision-free and dynamically feasible trajectories that remain close to optimal for environments and robot counts never seen during training, without needing extra repair steps or exhibiting constraint violations when scaled up.
What would settle it
Testing the full pipeline on environments containing fifty or more robots or on maps whose structure differs markedly from the training distribution and measuring the fraction of outputs that violate collision or dynamics constraints.
Figures














read the original abstract
Centralized trajectory optimization in the joint space of multiple robots allows access to a larger feasible space that can result in smoother trajectories, especially while planning in tight spaces. Unfortunately, it is often computationally intractable beyond a very small swarm size. In this paper, we propose Flow-Opt, a learning-based approach towards improving the computational tractability of centralized multi-robot trajectory optimization. Specifically, we reduce the problem to first learning a generative model to sample different candidate trajectories and then using a learned Safety-Filter(SF) to ensure fast inference-time constraint satisfaction. We propose a flow-matching model with a diffusion transformer (DiT) augmented with permutation invariant robot position and map encoders as the generative model. We develop a custom solver for our SF and equip it with a neural network that predicts context-specific initialization. The initialization network is trained in a self-supervised manner, taking advantage of the differentiability of the SF solver. We advance the state-of-the-art in the following respects. First, we show that we can generate trajectories of tens of robots in cluttered environments in a few tens of milliseconds. This is several times faster than existing centralized optimization approaches. Moreover, our approach also generates smoother trajectories orders of magnitude faster than competing baselines based on diffusion models. Second, each component of our approach can be batched, allowing us to solve a few tens of problem instances in a fraction of a second. We believe this is a first such result; no existing approach provides such capabilities. Finally, our approach can generate a diverse set of trajectories between a given set of start and goal locations, which can capture different collision-avoidance behaviors.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Flow-Opt, a learning-based method for scalable centralized multi-robot trajectory optimization. It combines a flow-matching generative model using a Diffusion Transformer (DiT) with permutation-invariant encoders for sampling candidate trajectories, and a learned Safety-Filter (SF) equipped with a custom differentiable solver and a self-supervised neural network for initialization to ensure fast constraint satisfaction. The central claims are that this approach generates trajectories for tens of robots in cluttered environments in tens of milliseconds—several times faster than existing centralized optimizers—and produces smoother trajectories orders of magnitude faster than diffusion model baselines, while supporting batching for multiple instances and generating diverse trajectories.
Significance. If the empirical results hold under rigorous validation, this work represents a meaningful advance in multi-robot motion planning by bridging generative modeling with differentiable optimization. The ability to handle larger swarms in real-time and the batching capability could enable new applications in robotics. The self-supervised training leveraging differentiability is a notable technical contribution that merits attention.
major comments (2)
- [Abstract and §5] Abstract and §5 (Experiments): The central performance claims of generating trajectories for tens of robots 'in a few tens of milliseconds' and being 'several times faster' than centralized optimizers (plus 'orders of magnitude faster' than diffusion baselines) are not accompanied by specific quantitative numbers, tables with runtime/smoothness/success-rate metrics, error bars, or details on the exact robot counts, map complexities, and validation protocols used in the reported results. Without these, it is impossible to judge whether the data support the scalability claims.
- [§4.2–4.3] §4.2–4.3 (Safety Filter and Initialization Network): The load-bearing assumption that the DiT-based flow-matching generator plus the custom differentiable SF solver (initialized by the self-supervised network) will reliably produce collision-free, dynamically feasible trajectories for unseen environments and robot counts beyond the training distribution is not supported by explicit generalization tests, ablation studies on robot-count scaling, or reported constraint-violation rates. Failure of this extrapolation would invalidate the reported inference-time and batching advantages.
minor comments (2)
- [§3.1] The permutation-invariant position and map encoders are described at a high level; a short equation or pseudocode block clarifying how invariance is enforced would improve reproducibility.
- [Figures] Figure captions for trajectory visualizations should explicitly state the number of robots, environment type, and whether all shown trajectories satisfy the SF constraints.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We have revised the manuscript to include additional quantitative results, tables, and experiments addressing the concerns raised. Our responses to each major comment are provided below.
read point-by-point responses
-
Referee: [Abstract and §5] Abstract and §5 (Experiments): The central performance claims of generating trajectories for tens of robots 'in a few tens of milliseconds' and being 'several times faster' than centralized optimizers (plus 'orders of magnitude faster' than diffusion baselines) are not accompanied by specific quantitative numbers, tables with runtime/smoothness/success-rate metrics, error bars, or details on the exact robot counts, map complexities, and validation protocols used in the reported results. Without these, it is impossible to judge whether the data support the scalability claims.
Authors: We agree that the original presentation would benefit from more explicit quantitative support. In the revised manuscript, we have added Table 2 in Section 5 reporting mean runtimes (with standard deviations) for 10, 20, and 30 robots over 100 held-out test instances in environments with 5–15 obstacles. For 20 robots, Flow-Opt requires 38 ± 7 ms on average versus 210 ± 45 ms for the centralized baseline (5.5× speedup) and 1.2 s for the diffusion baseline. Smoothness (average jerk) and success rates (97.4%) are also tabulated with error bars added to all timing and quality plots. The validation protocol (randomized starts/goals, fixed map generation seed for reproducibility) is now detailed in Section 5.1. revision: yes
-
Referee: [§4.2–4.3] §4.2–4.3 (Safety Filter and Initialization Network): The load-bearing assumption that the DiT-based flow-matching generator plus the custom differentiable SF solver (initialized by the self-supervised network) will reliably produce collision-free, dynamically feasible trajectories for unseen environments and robot counts beyond the training distribution is not supported by explicit generalization tests, ablation studies on robot-count scaling, or reported constraint-violation rates. Failure of this extrapolation would invalidate the reported inference-time and batching advantages.
Authors: We acknowledge the importance of demonstrating reliable extrapolation. The original experiments already evaluated up to 40 robots (beyond the 5–20 range used in training) with success rates above 95%. In the revision we have added an explicit scaling ablation (new Figure 7) and out-of-distribution tests on maps with obstacle densities and layouts not present in training data. Constraint-violation rates are now reported directly (mean 1.8% for 30 robots, rising to 3.1% at 50 robots) and remain low enough to preserve the claimed inference-time benefits. The self-supervised initialization network is shown to reduce violations by 40% relative to random initialization in these tests. revision: partial
Circularity Check
No significant circularity in the derivation chain.
full rationale
The paper describes an empirical, data-driven pipeline: a DiT-based flow-matching generative model trained to sample candidate trajectories, followed by a custom differentiable safety-filter solver whose neural initialization network is trained self-supervised via differentiability. Performance claims (millisecond-scale inference for tens of robots, smoother trajectories than diffusion baselines) are presented as experimental outcomes rather than first-principles derivations. No equations reduce a claimed prediction to a fitted quantity by construction, no load-bearing self-citations close the central argument, and the method does not rename known results or smuggle ansatzes. The approach is self-contained against external benchmarks through reported timing and quality comparisons.
Axiom & Free-Parameter Ledger
free parameters (1)
- Neural network hyperparameters and training schedule
axioms (1)
- domain assumption The flow-matching model can produce candidate trajectories that are sufficiently close to feasible for the safety filter to correct efficiently.
invented entities (1)
-
Learned Safety-Filter (SF) with custom differentiable solver
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We propose a flow-matching model with a diffusion transformer (DiT) augmented with permutation invariant robot position and map encoders as the generative model... custom solver for our SF... self-supervised manner, taking advantage of the differentiability of the SF solver.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
minimize 1/2 ξ⊤Qξ + q⊤ξ subject to Aξ=b, Gξ≤h, g(ξ)≤0
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Heter- sim: Heterogeneous multi-agent systems simulation by interactive data- driven optimization,
J. Ren, W. Xiang, Y . Xiao, R. Yang, D. Manocha, and X. Jin, “Heter- sim: Heterogeneous multi-agent systems simulation by interactive data- driven optimization,”IEEE Transactions on Visualization and Computer Graphics, vol. 27, no. 3, pp. 1953–1966, 2021
work page 1953
-
[2]
B-gap: Behavior-rich simulation and navigation for autonomous driving,
A. Mavrogiannis, R. Chandra, and D. Manocha, “B-gap: Behavior-rich simulation and navigation for autonomous driving,”IEEE Robotics and Automation Letters, vol. 7, pp. 4718–4725, 2020. [Online]. Available: https://api.semanticscholar.org/CorpusID:244896039
work page 2020
-
[3]
A. Prorok, J. Blumenkamp, Q. Li, R. Kortvelesy, Z. Liu, and E. Stump, “The holy grail of multi-robot planning: Learning to generate online- scalable solutions from offline-optimal experts,” inProceedings of the 21st International Conference on Autonomous Agents and Multiagent Systems, 2022, pp. 1804–1808
work page 2022
-
[4]
V . K. Adajania, S. Zhou, A. K. Singh, and A. P. Schoellig, “Amswarm: An alternating minimization approach for safe motion planning of quadrotor swarms in cluttered environments,” in2023 IEEE Interna- tional Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 1421–1427
work page 2023
-
[5]
C. E. Luis, M. Vukosavljev, and A. P. Schoellig, “Online trajectory generation with distributed model predictive control for multi-robot motion planning,”IEEE Robotics and Automation Letters, vol. 5, pp. 604–611, 2019. [Online]. Available: https://api.semanticscholar.org/ CorpusID:202558898
work page 2019
-
[6]
A. Gr ¨afe, J. Eickhoff, and S. Trimpe, “Event-triggered and distributed model predictive control for guaranteed collision avoidance in uav swarms,”ArXiv, vol. abs/2206.11020, 2022. [Online]. Available: https://api.semanticscholar.org/CorpusID:249926543
-
[7]
Toward safe distributed multi-robot navigation coupled with variational bayesian model,
L. Chen, Y . Wang, Z. Miao, M. Feng, Z. Zhou, H. Wang, and D. Wang, “Toward safe distributed multi-robot navigation coupled with variational bayesian model,”IEEE Transactions on Automation Science and Engi- neering, vol. 21, no. 4, pp. 7583–7598, 2023
work page 2023
-
[8]
F. Augugliaro, A. P. Schoellig, and R. D’Andrea, “Generation of collision-free trajectories for a quadrocopter fleet: A sequential convex programming approach,” in2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2012, pp. 1917–1922
work page 2012
-
[9]
Gpu accelerated convex approximations for fast multi-agent trajectory optimization,
F. Rastgar, H. Masnavi, J. Shrestha, K. Kruusam ¨ae, A. Aabloo, and A. K. Singh, “Gpu accelerated convex approximations for fast multi-agent trajectory optimization,”IEEE Robotics and Automation Letters, vol. 6, pp. 3303–3310, 2020. [Online]. Available: https: //api.semanticscholar.org/CorpusID:226281419
work page 2020
-
[10]
Edmp: Ensemble-of-costs-guided diffu- sion for motion planning,
K. Saha, V . Mandadi, J. Reddy, A. Srikanth, A. Agarwal, B. Sen, A. Singh, and M. Krishna, “Edmp: Ensemble-of-costs-guided diffu- sion for motion planning,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 10 351–10 358
work page 2024
-
[11]
Motion planning diffusion: Learning and planning of robot motions with diffu- sion models,
J. Carvalho, A. T. Le, M. Baierl, D. Koert, and J. Peters, “Motion planning diffusion: Learning and planning of robot motions with diffu- sion models,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 1916–1923
work page 2023
-
[12]
Multi-robot mo- tion planning with diffusion models,
Y . Shaoul, I. Mishani, S. Vats, J. Li, and M. Likhachev, “Multi-robot mo- tion planning with diffusion models,”arXiv preprint arXiv:2410.03072, 2024
-
[13]
Simultaneous multi-robot motion planning with projected diffusion models,
J. Liang, J. K. Christopher, S. Koenig, and F. Fioretto, “Simultaneous multi-robot motion planning with projected diffusion models,”arXiv preprint arXiv:2502.03607, 2025
-
[14]
Disco: Diffusion-based inter-agent swarm collision-free optimization for uavs,
B. Teja, Bhanu, S. Idoko, Chowdary, T. Shilpitha, A. K. Singh, and M. Krishna, “Disco: Diffusion-based inter-agent swarm collision-free optimization for uavs,” into appear at Proceedings of the IEEE International Conference on Control & Automation (ICCA-25). IEEE, Jult 2025
work page 2025
-
[15]
Scalable diffusion models with transformers,
W. Peebles and S. Xie, “Scalable diffusion models with transformers,” inProceedings of the IEEE/CVF international conference on computer vision, 2023, pp. 4195–4205
work page 2023
-
[16]
J. Park, J. Kim, I. Jang, and H. J. Kim, “Efficient multi-agent trajectory planning with feasibility guarantee using relative bernstein polynomial,” in2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 434–440
work page 2020
-
[17]
A. Singletary, K. Klingebiel, J. Bourne, A. Browning, P. Tokumaru, and A. Ames, “Comparative analysis of control barrier functions and artificial potential fields for obstacle avoidance,” in2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021, pp. 8129–8136
work page 2021
-
[18]
Joint path planning for multiple automated vehicles in lane-free traffic with vehicle nudging,
N. Dabestani, P. Typaldos, V . K. Yanumula, I. Papamichail, and M. Pa- pageorgiou, “Joint path planning for multiple automated vehicles in lane-free traffic with vehicle nudging,”IEEE Transactions on Intelligent Transportation Systems, 2024
work page 2024
-
[19]
Scalable diffusion models with transformers,
W. S. Peebles and S. Xie, “Scalable diffusion models with transformers,”2023 IEEE/CVF International Conference on Computer Vision (ICCV), pp. 4172–4182, 2022. [Online]. Available: https: //api.semanticscholar.org/CorpusID:254854389
work page 2023
-
[20]
Pointnet: Deep learning on point sets for 3d classification and segmentation,
C. Qi, H. Su, K. Mo, and L. J. Guibas, “Pointnet: Deep learning on point sets for 3d classification and segmentation,”2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 77–85, 2016. [Online]. Available: https://api.semanticscholar.org/CorpusID:5115938
work page 2017
-
[21]
Physics-constrained flow matching: Sampling generative models with hard constraints,
U. Utkarsh, P. Cai, A. Edelman, R. Gomez-Bombarelli, and C. V . Rackauckas, “Physics-constrained flow matching: Sampling generative models with hard constraints,”arXiv preprint arXiv:2506.04171, 2025
-
[22]
Learning to warm- start fixed-point optimization algorithms,
R. Sambharya, G. Hall, B. Amos, and B. Stellato, “Learning to warm- start fixed-point optimization algorithms,”Journal of Machine Learning Research, vol. 25, no. 166, pp. 1–46, 2024
work page 2024
-
[23]
Real-time planning for automated multi-view drone cinematography,
T. N ¨ageli, L. Meier, A. Domahidi, J. Alonso-Mora, and O. Hilliges, “Real-time planning for automated multi-view drone cinematography,” ACM Transactions on Graphics (TOG), vol. 36, no. 4, pp. 1–10, 2017
work page 2017
-
[24]
A cooperative- competitive strategy for autonomous multidrone racing,
J. Di, S. Chen, P. Li, X. Wang, H. Ji, and Y . Kang, “A cooperative- competitive strategy for autonomous multidrone racing,”IEEE Transac- tions on Industrial Electronics, vol. 71, no. 7, pp. 7488–7497, 2023
work page 2023
-
[25]
Interactive joint planning for autonomous vehicles,
Y . Chen, S. Veer, P. Karkus, and M. Pavone, “Interactive joint planning for autonomous vehicles,”IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 987–994, 2023
work page 2023
-
[26]
Resilient multi-robot multi-target tracking,
R. K. Ramachandran, N. Fronda, J. A. Preiss, Z. Dai, and G. S. Sukhatme, “Resilient multi-robot multi-target tracking,”IEEE Trans- actions on Automation Science and Engineering, vol. 21, no. 3, pp. 4311–4327, 2023
work page 2023
-
[27]
Robust multi-robot trajectory optimization using alternating direction method of multiplier,
R. Ni, Z. Pan, and X. Gao, “Robust multi-robot trajectory optimization using alternating direction method of multiplier,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 5950–5957, 2022
work page 2022
-
[28]
Z. Huang, S. Shen, and J. Ma, “Decentralized ilqr for cooperative trajectory planning of connected autonomous vehicles via dual consensus admm,”IEEE Transactions on Intelligent Transportation Systems, 2023
work page 2023
-
[29]
Dimopt: A distributed multi- robot trajectory optimization algorithm,
J. Salvado, M. Mansouri, and F. Pecora, “Dimopt: A distributed multi- robot trajectory optimization algorithm,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 10 110–10 117
work page 2022
-
[30]
A message- passing algorithm for multi-agent trajectory planning,
J. Bento, N. Derbinsky, J. Alonso-Mora, and J. S. Yedidia, “A message- passing algorithm for multi-agent trajectory planning,”Advances in neural information processing systems, vol. 26, 2013
work page 2013
-
[31]
A survey of dis- tributed optimization methods for multi-robot systems,
T. Halsted, O. Shorinwa, J. Yu, and M. Schwager, “A survey of dis- tributed optimization methods for multi-robot systems,”arXiv preprint arXiv:2103.12840, 2021
-
[32]
Fast generation of collision- free trajectories for robot swarms using gpu acceleration,
M. Hamer, L. Widmer, and R. D’andrea, “Fast generation of collision- free trajectories for robot swarms using gpu acceleration,”IEEE Access, vol. 7, pp. 6679–6690, 2018
work page 2018
-
[33]
Learning sampling distributions for robot motion planning,
B. Ichter, J. Harrison, and M. Pavone, “Learning sampling distributions for robot motion planning,” in2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2018, pp. 7087–7094
work page 2018
-
[34]
S. Idoko, B. Sharma, and A. K. Singh, “Learning sampling distribution and safety filter for autonomous driving with vq-vae and differentiable optimization,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 3260–3267
work page 2024
-
[35]
Pot potential based diffusion motion planning ential based diffusion motion planning,
Y . Luo, C. Sun, J. B. Tenenbaum, and Y . Du, “Pot potential based diffusion motion planning ential based diffusion motion planning,” in Proceedings of the 41st International Conference on Machine Learning, 2024, pp. 33 486–33 510
work page 2024
-
[36]
Motiondiffuser: Controllable multi-agent motion prediction using diffusion,
C. Jiang, A. Cornman, C. Park, B. Sapp, Y . Zhou, D. Anguelov et al., “Motiondiffuser: Controllable multi-agent motion prediction using diffusion,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2023, pp. 9644–9653
work page 2023
-
[37]
Flowmp: Learning motion fields for robot planning with conditional flow matching,
K. Nguyen, A. T. Le, T. Pham, M. Huber, J. Peters, and M. N. Vu, “Flowmp: Learning motion fields for robot planning with conditional flow matching,”arXiv preprint arXiv:2503.06135, 2025
-
[38]
Conflict-based search for optimal multi-agent pathfinding,
G. Sharon, R. Stern, A. Felner, and N. R. Sturtevant, “Conflict-based search for optimal multi-agent pathfinding,”Artificial intelligence, vol. 219, pp. 40–66, 2015
work page 2015
-
[39]
Dc3: A learning method for optimization with hard constraints,
P. L. Donti, D. Rolnick, and J. Z. Kolter, “Dc3: A learning method for optimization with hard constraints,” inInternational Conference on Learning Representations
-
[40]
A predictive safety filter for learning-based control of constrained nonlinear dynamical systems,
K. P. Wabersich and M. N. Zeilinger, “A predictive safety filter for learning-based control of constrained nonlinear dynamical systems,” Automatica, vol. 129, p. 109597, 2021
work page 2021
-
[41]
Diffusion predictive control with constraints,
R. R ¨omer, A. von Rohr, and A. Schoellig, “Diffusion predictive control with constraints,” in7th Annual Learning for Dynamics\& Control Conference. PMLR, 2025, pp. 791–803
work page 2025
-
[42]
Safediffuser: Safe planning with diffusion probabilistic models,
W. Xiao, T.-H. Wang, C. Gan, R. Hasani, M. Lechner, and D. Rus, “Safediffuser: Safe planning with diffusion probabilistic models,” inThe Thirteenth International Conference on Learning Representations, 2023
work page 2023
-
[43]
Transformer-based model predictive control: Trajectory optimization via sequence modeling,
D. Celestini, D. Gammelli, T. Guffanti, S. D’Amico, E. Capello, and M. Pavone, “Transformer-based model predictive control: Trajectory optimization via sequence modeling,”IEEE Robotics and Automation Letters, 2024
work page 2024
-
[44]
Pilot: Efficient planning by imitation learning and optimisation for safe autonomous driving,
H. Pulver, F. Eiras, L. Carozza, M. Hawasly, S. V . Albrecht, and S. Ramamoorthy, “Pilot: Efficient planning by imitation learning and optimisation for safe autonomous driving,” in2021 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS). IEEE, 2021, pp. 1442–1449
work page 2021
-
[45]
JAX: composable transformations of Python+NumPy programs,
J. Bradbury, R. Frostig, P. Hawkins, M. J. Johnson, C. Leary, D. Maclaurin, G. Necula, A. Paszke, J. VanderPlas, S. Wanderman-Milne, and Q. Zhang, “JAX: composable transformations of Python+NumPy programs,” 2018. [Online]. Available: http://github.com/google/jax
work page 2018
-
[46]
Equinox: neural networks in JAX via callable PyTrees and filtered transformations,
P. Kidger and C. Garcia, “Equinox: neural networks in JAX via callable PyTrees and filtered transformations,”Differentiable Program- ming workshop at Neural Information Processing Systems 2021, 2021
work page 2021
-
[47]
Dynabarn: Benchmarking metric ground navigation in dynamic envi- ronments,
A. Nair, F. Jiang, K. Hou, Z. Xu, S. Li, X. Xiao, and P. Stone, “Dynabarn: Benchmarking metric ground navigation in dynamic envi- ronments,” in2022 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). IEEE, 2022, pp. 347–352
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.