LTGS: Long-Term Gaussian Scene Chronology From Sparse View Updates
Pith reviewed 2026-05-18 07:26 UTC · model grok-4.3
The pith
LTGS models changing real-world scenes over long periods by decomposing them into reusable template Gaussians that adapt from sparse new views.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Given an incomplete and unstructured 3D Gaussian Splatting representation from an initial set of input images, the framework constructs objects as template Gaussians that serve as structural reusable priors for shared object tracks, then applies a refinement pipeline to modulate these priors for adaptation to temporally varying environments from few-shot observations, enabling robust modeling of long-term scene chronology that generalizes across time steps through simple transformations.
What carries the argument
Template Gaussians that serve as structural reusable priors for shared object tracks and undergo modulation to adapt to new few-shot observations.
If this is right
- Superior reconstruction quality compared to baselines on real-world datasets collected with sparse casual captures.
- Fast and light-weight updates that avoid full re-training for each new time step.
- Generalization across multiple time steps through simple transformations of the initial representation.
- Practical handling of both abrupt object movements and subtle environmental changes.
- Scalable representation for the temporal evolution of 3D environments without dense observations.
Where Pith is reading between the lines
- This decomposition approach could lower the ongoing data and compute cost of keeping digital 3D models current for applications such as robotics or virtual reality.
- The reuse of templates across time might combine naturally with automatic object detection to reduce manual intervention in long-term capture pipelines.
- A testable extension would be to measure how well the method handles seasonal outdoor changes or indoor lighting shifts that go beyond the collected datasets.
Load-bearing premise
Objects can be reliably decomposed into template Gaussians that remain reusable and refinable across abrupt movements and subtle variations given only few-shot observations at later time steps.
What would settle it
A real-world sequence in which an object undergoes a shape or appearance change that cannot be expressed by refining its initial template Gaussian, resulting in visible artifacts or low-quality novel views when only a few additional images are provided.
Figures







read the original abstract
Recent advances in novel-view synthesis can create the photo-realistic visualization of real-world environments from conventional camera captures. However, the everyday environment experiences frequent scene changes, which require dense observations, both spatially and temporally, that an ordinary setup cannot cover. We propose long-term Gaussian scene chronology from sparse-view updates, coined LTGS, an efficient scene representation that can embrace everyday changes from highly under-constrained casual captures. Given an incomplete and unstructured 3D Gaussian Splatting (3DGS) representation obtained from an initial set of input images, we robustly model the long-term chronology of the scene despite abrupt movements and subtle environmental variations. We construct objects as template Gaussians, which serve as structural, reusable priors for shared object tracks. Then, the object templates undergo a further refinement pipeline that modulates the priors to adapt to temporally varying environments given few-shot observations. Once trained, our framework is generalizable across multiple time steps through simple transformations, significantly enhancing the scalability for a temporal evolution of 3D environments. As existing datasets do not explicitly represent the long-term real-world changes with a sparse capture setup, we collect real-world datasets to evaluate the practicality of our pipeline. Experiments demonstrate that our framework achieves superior reconstruction quality compared to other baselines while enabling fast and light-weight updates. Project page is available at: https://mkjjang3598.github.io/LTGS.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces LTGS, a pipeline for long-term 3D scene modeling under sparse temporal updates. Starting from an initial incomplete 3D Gaussian Splatting reconstruction, the method decomposes the scene into object-level template Gaussians that act as reusable structural priors. These templates are refined via a modulation pipeline on few-shot observations at later time steps to handle abrupt object movements and environmental changes. The framework then supports efficient updates across multiple time steps through simple transformations rather than full retraining. New real-world datasets with sparse captures are collected for evaluation, and experiments claim superior reconstruction quality and lightweight updates relative to baselines.
Significance. If the core claims hold, the work would advance efficient temporal extension of 3DGS representations for everyday changing environments captured casually. Strengths include the collection of new real-world datasets explicitly targeting long-term sparse-view chronology and the emphasis on reusable object templates that enable generalization without dense re-capture. The approach addresses a practical gap between static 3DGS and fully dynamic scene modeling.
major comments (2)
- [§3.2] §3.2 (Object Template Construction): The decomposition of the initial 3DGS into reusable template Gaussians is load-bearing for the reusable-prior and fast-update claims, yet the manuscript provides no isolated quantitative validation (e.g., template correspondence error, tracking success rate, or failure-case ablation) on abrupt displacements under the few-shot regime highlighted in the skeptic note. Without these metrics, it is unclear whether the priors remain trackable and refinable as asserted.
- [§4] §4 (Experiments): The reported comparisons show final render quality gains, but the evaluation does not include separate ablations isolating the contribution of the template refinement step versus the initial decomposition or the simple-transformation update mechanism. This makes it difficult to attribute the claimed superiority and lightweight property specifically to the proposed chronology pipeline.
minor comments (2)
- [§3.3] Notation for the refinement modulation parameters is introduced without a clear summary table relating them to the template attributes (position, scale, opacity).
- [Figure 4] Figure captions for the real-world dataset examples could more explicitly label the number of input views per time step to match the sparse-update emphasis in the abstract.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and will incorporate the suggested additions to strengthen the manuscript.
read point-by-point responses
-
Referee: [§3.2] §3.2 (Object Template Construction): The decomposition of the initial 3DGS into reusable template Gaussians is load-bearing for the reusable-prior and fast-update claims, yet the manuscript provides no isolated quantitative validation (e.g., template correspondence error, tracking success rate, or failure-case ablation) on abrupt displacements under the few-shot regime highlighted in the skeptic note. Without these metrics, it is unclear whether the priors remain trackable and refinable as asserted.
Authors: We agree that isolated quantitative validation for the template construction step would make the reusable-prior and fast-update claims more transparent. While the end-to-end results already demonstrate effective handling of abrupt movements and few-shot adaptation, we will add explicit metrics—including template correspondence error, tracking success rate, and targeted failure-case ablations under the few-shot regime—to the revised manuscript. revision: yes
-
Referee: [§4] §4 (Experiments): The reported comparisons show final render quality gains, but the evaluation does not include separate ablations isolating the contribution of the template refinement step versus the initial decomposition or the simple-transformation update mechanism. This makes it difficult to attribute the claimed superiority and lightweight property specifically to the proposed chronology pipeline.
Authors: We appreciate the request for finer-grained ablations. In the revised version we will add experiments that separately evaluate the template refinement step (comparing against the initial decomposition alone) and the simple-transformation update mechanism (comparing against full retraining), thereby clarifying the specific contributions to reconstruction quality and update efficiency. revision: yes
Circularity Check
No circularity: LTGS is an algorithmic pipeline with independent components, not a self-referential derivation.
full rationale
The paper describes a new scene representation pipeline that starts from an initial incomplete 3DGS, decomposes into reusable object template Gaussians as structural priors, and refines them on later sparse observations. These are constructive modeling choices and training procedures rather than quantities derived from or equivalent to their own fitted parameters. No equations reduce by construction to inputs, no uniqueness theorems are imported from self-citations, and no predictions are statistically forced by prior fits. The central claims rest on experimental comparisons against baselines on collected real-world data, which constitutes external validation rather than circular self-reference. This is the standard non-circular outcome for a methods paper proposing a practical extension of existing Gaussian splatting techniques.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We construct objects as template Gaussians, which serve as structural, reusable priors for shared object tracks. Then, the object templates undergo a further refinement pipeline that modulates the priors to adapt to temporally varying environments given few-shot observations.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We aggregate the observations to build an object-level Gaussian template that models an object shared across time.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Has anything changed? 3d change detection by 2d segmentation masks.arXiv preprint arXiv:2312.01148,
Aikaterini Adam, Konstantinos Karantzalos, Lazaros Grammatikopoulos, and Torsten Sattler. Has anything changed? 3d change detection by 2d segmentation masks.arXiv preprint arXiv:2312.01148,
-
[2]
Alexander Kirillov, Eric Mintun, Nikhila Ravi, Hanzi Mao, Chloe Rolland, Laura Gustafson, Tete Xiao, Spencer Whitehead, Alexander C. Berg, Wan-Yen Lo, Piotr Doll ´ar, and Ross Girshick. Segment anything.arXiv:2304.02643,
work page internal anchor Pith review Pith/arXiv arXiv
-
[3]
Ken Sakurada, Mikiya Shibuya, and Weimin Wang
URLhttps:// arxiv.org/abs/2209.14341. Ken Sakurada, Mikiya Shibuya, and Weimin Wang. Weakly supervised silhouette-based seman- tic scene change detection. In2020 IEEE International conference on robotics and automation (ICRA), pp. 6861–6867. IEEE,
-
[4]
Splatt3R: Zero-shot Gaussian Splatting from Uncalibrated Image Pairs
11 Paper preprint Brandon Smart, Chuanxia Zheng, Iro Laina, and Victor Adrian Prisacariu. Splatt3r: Zero-shot gaussian splatting from uncalibrated image pairs.arXiv preprint arXiv:2408.13912,
work page internal anchor Pith review Pith/arXiv arXiv
-
[5]
Lin Zeng, Boming Zhao, Jiarui Hu, Xujie Shen, Ziqiang Dang, Hujun Bao, and Zhaopeng Cui. Gaussianupdate: Continual 3d gaussian splatting update for changing environments.arXiv preprint arXiv:2508.08867,
-
[6]
12 Paper preprint A IMPLEMENTATION DETAILS A.1 CHANGE DETECTION We detect fine object-level changes in 2D by using the semantic prior of the SAM model (Kirillov et al., 2023). We prepare a pair of images (I i t , ˆI i t) from captured and rendered images from the cor- responding viewpoints. To find abstract differences between the rendered and captured im...
work page 2023
-
[7]
to automatically determine the thresholdτ cos. We obtain the coarse binary masksM i t,coarse as follows: M i t,coarse =γ·cos(E(I i t),E( ˆI i t)) + (1−γ)·SSIM(I i t , ˆI i t)≤τ cos,(3) whereEdenotes the feature extractor of SAM. After obtaining coarse change regions, we extract fine-grained object-level change masks to model instance-wise changes. Since p...
work page 2023
-
[8]
Note that we conduct this process identically for every possible timestep pair fort∈[0, T]
to solve an optimal as- signment problem between the instances asπ ∗ = arg max π P k Sk↔π(k), whereπ(k)denotes the matched object in timestep ˜t. Note that we conduct this process identically for every possible timestep pair fort∈[0, T]. A.3 OBJECTGAUSSIANTEMPLATE RECONSTRUCTION Given the tracked object masksM={M i t |i= 1, ..., N v;t= 0, ..., T}, we prov...
work page 2024
-
[9]
with estimated poses from the hierarchical localization pipeline Sarlin et al. (2019). In the original implementation of MASt3R, camera parameters were optimized jointly with per-view depth maps and global scales. We modify the optimization loop to operate only on depth maps with scale and offset parameters, while the camera poses remain fixed. To reduce ...
work page 2019
-
[10]
26.22 25.81 24.55 16.53 22.66 22.32 22.40 20.87 CL-Splats (Ackermann et al., 2025)26.8424.90 25.79 18.71 19.2923.9422.21 21.47 LTGS (ours) 26.67 26.21 28.65 20.77 25.2223.50 25.22 22.64 Table 5:SSIM comparisons on CL-NeRF dataset and our dataset.The first and second best results are highlighted inboldand underlined , respectively. CL-NeRF dataset Our data...
-
[11]
0.829 0.636 0.725 0.696 0.863 0.881 0.859 0.775 CL-Splats (Ackermann et al., 2025)0.8480.627 0.840 0.749 0.873 0.836 0.866 0.819 LTGS (ours) 0.848 0.6450.892 0.845 0.911 0.922 0.924 0.840 Table 6:LPIPS comparisons on CL-NeRF dataset and our dataset.The first and second best results are highlighted inboldand underlined , respectively. CL-NeRF dataset Our d...
work page 2025
-
[12]
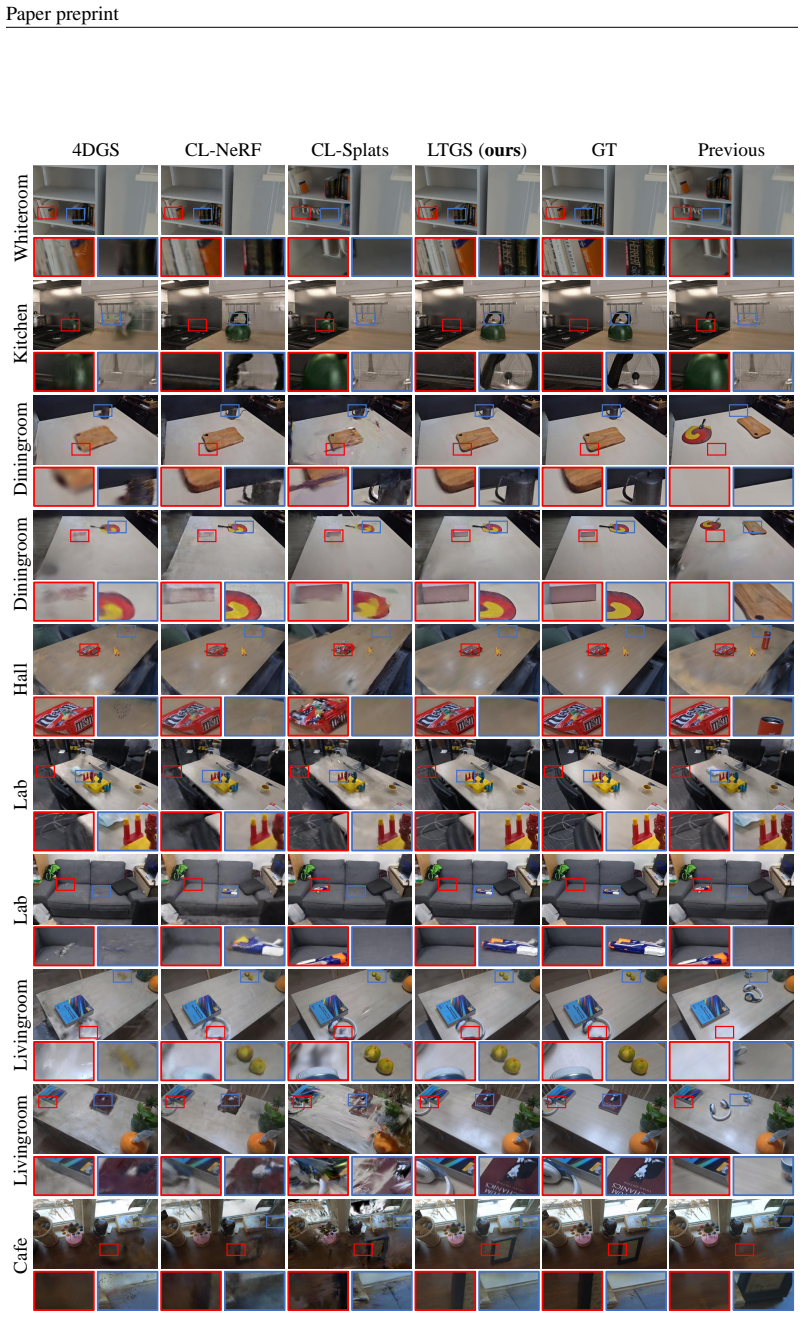
0.521 0.536 0.339 0.463 0.324 0.328 0.350 0.428 CL-Splats (Ackermann et al., 2025)0.492 0.542 0.214 0.345 0.308 0.323 0.303 0.280 LTGS (ours) 0.478 0.5220.128 0.246 0.253 0.185 0.204 0.260 16 Paper preprint 4DGS CL-NeRF CL-Splats LTGS (ours) GT Previous Whiteroom Cafe Kitchen Diningroom Diningroom Lab Lab Livingroom Livingroom Hall Figure 8:Additional qua...
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.