Learning Time-Varying Graphs from Incomplete Graph Signals
Pith reviewed 2026-05-18 06:27 UTC · model grok-4.3
The pith
A joint optimization framework recovers time-varying graph Laplacians and imputes missing signal entries from partial observations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a single non-convex program, regularized by a fused-lasso penalty on the sequence of graph Laplacians, can simultaneously estimate time-varying topologies and reconstruct missing signal values. The PADMM solver converges to a stationary point despite non-convexity, and the resulting graph estimator satisfies high-probability error bounds that scale with the number of samples, the smoothness of the signals, and the intrinsic temporal variability of the graphs.
What carries the argument
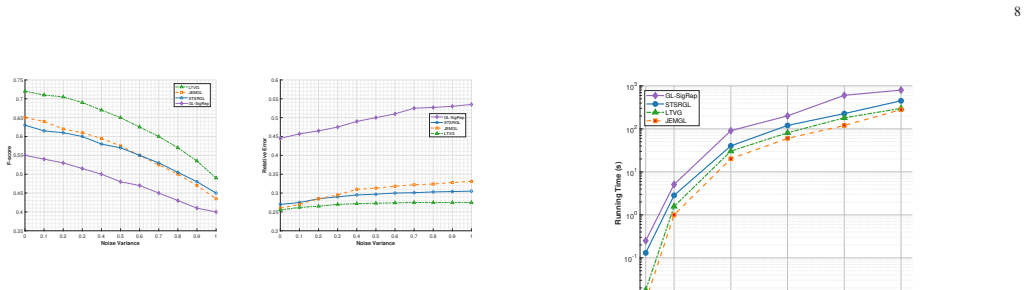
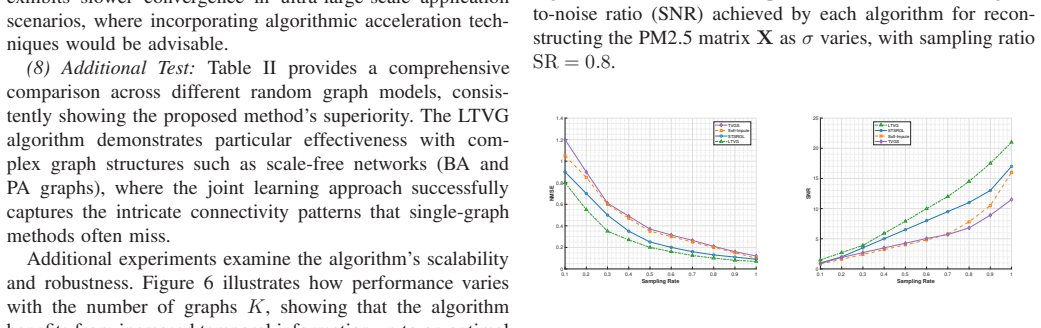
Fused-lasso penalty on the differences between consecutive Laplacian matrices, which enforces temporal smoothness on the graph sequence while the PADMM algorithm solves the resulting joint optimization with closed-form updates for both graph and signal variables.
If this is right
- The bidirectional coupling between graph and signal estimates yields higher accuracy than separate imputation-then-learning pipelines, especially when more than half the entries are missing.
- Closed-form subproblem solutions allow the method to scale to networks with hundreds of nodes and hundreds of time steps.
- The derived non-asymptotic bounds tighten monotonically with larger sample size and with stronger smoothness assumptions on both signals and graph evolution.
- Convergence to a stationary point holds for any initialization because the algorithm alternates exact proximal steps on each block.
Where Pith is reading between the lines
- The same joint formulation could be adapted to dynamic community detection by replacing the Laplacian regularizer with a suitable penalty on cluster assignments.
- In sensor networks with intermittent failures, the method supplies both the inferred topology and the completed measurements in one pass.
- An experiment that deliberately violates gradual evolution by inserting known abrupt rewirings would quantify how much performance degrades when the smoothness assumption is broken.
Load-bearing premise
The true sequence of graphs changes gradually enough that penalizing large jumps between successive Laplacians captures the evolution without forcing spurious variations.
What would settle it
Apply the estimator to synthetic signals generated from a graph sequence that undergoes an abrupt topological jump at a known time and check whether the recovered Laplacians smooth over the jump or produce large reconstruction errors at that instant.
Figures









read the original abstract
This paper tackles the challenging problem of jointly inferring time-varying network topologies and imputing missing data from partially observed graph signals. We propose a unified non-convex optimization framework to simultaneously recover a sequence of graph Laplacian matrices while reconstructing the unobserved signal entries. Unlike conventional decoupled methods, our integrated approach facilitates a bidirectional flow of information between the graph and signal domains, yielding superior robustness, particularly in high missing-data regimes. To capture realistic network dynamics, we introduce a fused-lasso type regularizer on the sequence of Laplacians. This penalty promotes temporal smoothness by penalizing large successive changes, thereby preventing spurious variations induced by noise while still permitting gradual topological evolution. For solving the joint optimization problem, we develop an efficient Proximal Alternating Direction Method of Multipliers (PADMM) algorithm, which leverages the problem's structure to yield closed-form solutions for both the graph and signal subproblems. This design ensures scalability to large-scale networks and long time horizons. On the theoretical front, despite the inherent non-convexity, we establish a convergence guarantee, proving that the proposed PADMM scheme converges to a stationary point. Furthermore, we derive non-asymptotic statistical guarantees, providing high-probability error bounds for the graph estimator as a function of sample size, signal smoothness, and the intrinsic temporal variability of the graph. Extensive numerical experiments validate the approach, demonstrating that it significantly outperforms state-of-the-art baselines in both convergence speed and the joint accuracy of graph learning and signal recovery.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a unified non-convex optimization framework for jointly recovering a sequence of graph Laplacian matrices and imputing missing entries in partially observed time-varying graph signals. It employs a fused-lasso regularizer on consecutive Laplacians to promote temporal smoothness, develops a PADMM algorithm with closed-form subproblem solutions that is claimed to converge to a stationary point despite non-convexity, derives non-asymptotic high-probability error bounds on the graph estimator in terms of sample size, signal smoothness, and temporal variability, and reports empirical outperformance over baselines in convergence speed and joint recovery accuracy.
Significance. If the claimed convergence and statistical bounds hold with the necessary conditions satisfied at the computed stationary points, the work would offer a practically useful integrated method for dynamic graph learning under missing data, with potential impact on applications involving noisy or incomplete network observations over time.
major comments (2)
- [Abstract and theoretical analysis] Abstract and theoretical analysis section: the claim of non-asymptotic high-probability error bounds for the graph estimator is presented alongside the PADMM convergence result to a stationary point. Standard non-convex PADMM theory guarantees only stationarity; the statistical bounds typically rely on restricted strong convexity or restricted eigenvalue conditions around the true sequence that may fail to hold at spurious stationary points where the fused-lasso term balances noise differently. An explicit argument bridging the two results (e.g., via a local RSC condition or uniqueness of the stationary point) is needed, as this is load-bearing for the central statistical guarantee.
- [Problem formulation] Optimization formulation and regularizer definition: the fused-lasso penalty is invoked to capture gradual topological evolution without introducing spurious variations, yet the paper does not provide a quantitative condition (e.g., on the regularization parameter relative to the minimal change in the true Laplacian sequence) under which this holds with high probability. This assumption directly affects both the statistical bounds and the practical robustness claims.
minor comments (2)
- [Problem formulation] Add explicit equation numbers for the data-fidelity term, graph smoothness penalty, and fused-lasso term in the joint objective to improve readability.
- [Numerical experiments] In the experimental section, report the specific values or selection procedure for the fused-lasso regularization parameters and include ablation on their sensitivity.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help us improve the clarity and rigor of the theoretical contributions in our manuscript. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract and theoretical analysis] Abstract and theoretical analysis section: the claim of non-asymptotic high-probability error bounds for the graph estimator is presented alongside the PADMM convergence result to a stationary point. Standard non-convex PADMM theory guarantees only stationarity; the statistical bounds typically rely on restricted strong convexity or restricted eigenvalue conditions around the true sequence that may fail to hold at spurious stationary points where the fused-lasso term balances noise differently. An explicit argument bridging the two results (e.g., via a local RSC condition or uniqueness of the stationary point) is needed, as this is load-bearing for the central statistical guarantee.
Authors: We acknowledge the importance of bridging the algorithmic convergence and statistical guarantees. In the revised version, we will introduce an additional assumption of local restricted strong convexity (RSC) in a neighborhood of the true time-varying Laplacian sequence. Under this local RSC condition, which holds when the regularization parameter is suitably chosen based on the signal smoothness and temporal variability, we prove that the stationary point to which PADMM converges is unique and coincides with the true parameter within the statistical error. This provides the necessary link, ensuring that the high-probability error bounds apply to the computed solution. We will also add a remark discussing the practical verification of this condition. revision: yes
-
Referee: [Problem formulation] Optimization formulation and regularizer definition: the fused-lasso penalty is invoked to capture gradual topological evolution without introducing spurious variations, yet the paper does not provide a quantitative condition (e.g., on the regularization parameter relative to the minimal change in the true Laplacian sequence) under which this holds with high probability. This assumption directly affects both the statistical bounds and the practical robustness claims.
Authors: We agree that specifying a quantitative condition on the regularization parameter would enhance the robustness claims. In the revision, we will add a proposition that provides a sufficient condition: if the regularization parameter λ satisfies λ ≥ C * (noise level / sqrt(sample size)) and λ ≤ (minimal true change Δ_min)/2 for some constant C, then with high probability the fused-lasso does not over-smooth or introduce spurious changes. This condition will be integrated into the main theorem on the statistical error bounds, explicitly relating it to the temporal variability term already present in our analysis. revision: yes
Circularity Check
No circularity; derivation chain self-contained
full rationale
The paper introduces a fused-lasso regularizer as a modeling choice to enforce temporal smoothness on Laplacian sequences, proposes a PADMM solver for the resulting non-convex joint optimization, proves algorithmic convergence to a stationary point, and separately derives non-asymptotic high-probability error bounds on the recovered graph sequence. These elements are presented as distinct contributions with no quoted reduction showing that any statistical bound or convergence result is obtained by construction from the fitted inputs, self-citation, or renaming of known patterns. The approach relies on standard proximal alternating direction methods and external-style penalties rather than tautological re-derivation of its own outputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- fused-lasso regularization parameters
axioms (1)
- domain assumption Graph signals are smooth with respect to the underlying Laplacian
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
fused-lasso type regularizer on the sequence of Laplacians... penalizing large successive changes
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
PADMM converges to a stationary point... non-asymptotic statistical guarantees... error bounds... sample size, signal smoothness, temporal variability
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
D. I. Shuman, S. K. Narang, P . Frossard, A. Ortega, and P . V an- dergheynst, “The emerging field of signal processing on grap hs: Ex- tending high-dimensional data analysis to networks and oth er irregular domains,” IEEE Signal Processing Magazine , vol. 30, no. 3, pp. 83–98, 2013
work page 2013
-
[2]
Graph signal processing: History, development, impact, a nd outlook,
G. Leus, A. G. Marques, J. M. Moura, A. Ortega, and D. I. Shu man, “Graph signal processing: History, development, impact, a nd outlook,” IEEE Signal Processing Magazine , vol. 40, no. 4, pp. 49–60, 2023
work page 2023
-
[3]
W. Li, X. Zhou, C. Y ang, Y . Fan, Z. Wang, and Y . Liu, “Multi- objective optimization algorithm based on characteristic s fusion of dynamic social networks for community discovery,” Information Fusion, vol. 79, pp. 110–123, 2022
work page 2022
-
[4]
S.-W. Lee, J. Tanveer, A. M. Rahmani, H. Alinejad-Rokny, P . Khosh- vaght, G. Zare, P . M. Alamdari, and M. Hosseinzadeh, “SFGCN: Synergetic fusion-based graph convolutional networks app roach for link prediction in social networks,” Information Fusion, vol. 114, p. 102684, 2025
work page 2025
-
[5]
S. Bloemheuvel, J. van den Hoogen, and M. Atzmueller, “A c ompu- tational framework for modeling complex sensor network dat a using graph signal processing and graph neural networks in struct ural health monitoring,” Applied Network Science , vol. 6, no. 1, p. 97, 2021
work page 2021
-
[6]
Graph signal reconstruction techniques for IOT air pollution monitorin g platforms,
P . Ferrer-Cid, J. M. Barcelo-Ordinas, and J. Garcia-Vid al, “Graph signal reconstruction techniques for IOT air pollution monitorin g platforms,” IEEE Internet of Things Journal , vol. 9, no. 24, pp. 25350–25362, 2022
work page 2022
-
[7]
Direct target localization with low-bit quantization in wireless sensor networks,
G. Zhang, W. Yi, M. Matthaiou, and P . K. V arshney, “Direct target localization with low-bit quantization in wireless sensor networks,” IEEE Transactions on Signal Processing , 2024
work page 2024
-
[8]
Gradients of connectivity as graph Fourier bases of brain activity,
G. Lioi, V . Gripon, A. Brahim, F. Rousseau, and N. Farrugi a, “Gradients of connectivity as graph Fourier bases of brain activity,” Network Neuroscience, vol. 5, no. 2, pp. 322–336, 2021
work page 2021
-
[9]
Estimating and analyzing neural information flow using sig nal process- ing on graphs,
F. Schwock, J. Bloch, L. Atlas, S. Abadi, and A. Y azdan-Sh ahmorad, “Estimating and analyzing neural information flow using sig nal process- ing on graphs,” in Proceedings of ICASSP , pp. 1–5, 2023
work page 2023
-
[10]
How to learn a graph from smooth signals ,
V . Kalofolias, “How to learn a graph from smooth signals ,” in Proceed- ings of AISTATS , pp. 920–929, 2016
work page 2016
-
[11]
Learning lapla- cian matrix in smooth graph signal representations,
X. Dong, D. Thanou, P . Frossard, and P . V andergheynst, “Learning lapla- cian matrix in smooth graph signal representations,” IEEE Transactions on Signal Processing , vol. 64, no. 23, pp. 6160–6173, 2016. 20
work page 2016
-
[12]
Autonomous inference of complex n etwork dynamics from incomplete and noisy data,
T.-T. Gao and G. Y an, “Autonomous inference of complex n etwork dynamics from incomplete and noisy data,” Nature Computational Science, vol. 2, no. 3, pp. 160–168, 2022
work page 2022
-
[13]
Inferring network structure with unobservable nodes from time series data,
M. Chen, Y . Zhang, Z. Zhang, L. Du, S. Wang, and J. Zhang, “ Inferring network structure with unobservable nodes from time series data,” Chaos: An Interdisciplinary Journal of Nonlinear Science , vol. 32, no. 1, 2022
work page 2022
-
[14]
A. Banerjee, S. Chandra, and E. Ott, “Network inference from short, noisy, low time-resolution, partial measurements: Applic ation to C. ele- gans neuronal calcium dynamics,” Proceedings of the National Academy of Sciences , vol. 120, no. 12, p. e2216030120, 2023
work page 2023
-
[15]
Learning sp arse graphs via majorization-minimization for smooth node signals,
G. Fatima, A. Arora, P . Babu, and P . Stoica, “Learning sp arse graphs via majorization-minimization for smooth node signals,” IEEE Signal Processing Letters, vol. 29, pp. 1022–1026, 2022
work page 2022
-
[16]
Sparse graph learning under Laplacian- related con- straints,
J. K. Tugnait, “Sparse graph learning under Laplacian- related con- straints,” IEEE Access , vol. 9, pp. 151067–151079, 2021
work page 2021
-
[17]
Proximal gradient methods for gene ral smooth graph total variation model in unsupervised learning,
B. Sun and H. Chang, “Proximal gradient methods for gene ral smooth graph total variation model in unsupervised learning,” Journal of Scien- tific Computing , vol. 93, no. 1, p. 2, 2022
work page 2022
-
[18]
Distributionally r obust graph learning from smooth signals under moment uncertainty,
X. Wang, Y .-M. Pun, and A. M.-C. So, “Distributionally r obust graph learning from smooth signals under moment uncertainty,” IEEE Trans- actions on Signal Processing , vol. 70, pp. 6216–6231, 2023
work page 2023
-
[19]
A linearly convergent o ptimization framework for learning graphs from smooth signals,
X. Wang, C. Y ao, and A. M.-C. So, “A linearly convergent o ptimization framework for learning graphs from smooth signals,” IEEE Transactions on Signal and Information Processing over Networks , vol. 9, pp. 490– 504, 2023
work page 2023
-
[20]
Kernel-ba sed graph learning from smooth signals: A functional viewpoint,
X. Pu, S. L. Chau, X. Dong, and D. Sejdinovic, “Kernel-ba sed graph learning from smooth signals: A functional viewpoint,” IEEE Trans- actions on Signal and Information Processing over Networks , vol. 7, pp. 192–207, 2021
work page 2021
-
[21]
T ime- varying graph learning from smooth and stationary graph sig nals with hidden nodes,
R. Y e, X.-Q. Jiang, H. Feng, J. Wang, R. Qiu, and X. Hou, “T ime- varying graph learning from smooth and stationary graph sig nals with hidden nodes,” EURASIP Journal on Advances in Signal Processing , vol. 2024, no. 1, p. 33, 2024
work page 2024
-
[22]
Joint network topology inference via structural fusion regularization,
Y . Y uan, K. Guo, Z. Xiong, T. Q. Quek, et al. , “Joint network topology inference via structural fusion regularization,” IEEE Transactions on Knowledge and Data Engineering , vol. 35, no. 10, pp. 10351–10364, 2023
work page 2023
-
[23]
Bayesian spillover graphs f or dynamic networks,
G. Deng and D. S. Matteson, “Bayesian spillover graphs f or dynamic networks,” in Proceedings of UAI , pp. 529–538, PMLR, 2022
work page 2022
-
[24]
G. Liang, P . Tiwari, S. Nowaczyk, and S. Byttner, “Highe r-order spatio- temporal physics-incorporated graph neural network for mu ltivariate time series imputation,” in Proceedings of CIKM , pp. 1356–1366, 2024
work page 2024
-
[25]
Handling missing data with graph representation learning,
J. Y ou, X. Ma, Y . Ding, M. J. Kochenderfer, and J. Leskove c, “Handling missing data with graph representation learning,” Advances in Neural Information Processing Systems , vol. 33, pp. 19075–19087, 2020
work page 2020
-
[26]
Missing dat a imputation with adversarially-trained graph convolutional networks,
I. Spinelli, S. Scardapane, and A. Uncini, “Missing dat a imputation with adversarially-trained graph convolutional networks,” Neural Networks , vol. 129, pp. 249–260, 2020
work page 2020
-
[27]
Robust time-vary ing graph signal recovery for dynamic physical sensor network data,
E. Y amagata, K. Naganuma, and S. Ono, “Robust time-vary ing graph signal recovery for dynamic physical sensor network data,” IEEE Trans- actions on Signal and Information Processing over Networks , 2025
work page 2025
-
[28]
J oint signal re- covery and graph learning from incomplete time-series,
A. Javaheri, A. Amini, F. Marvasti, and D. P . Palomar, “J oint signal re- covery and graph learning from incomplete time-series,” in Proceedings of ICASSP , pp. 13511–13515, 2024
work page 2024
-
[29]
Gegenbauer graph neural networks for time-varying signal reconstruc- tion,
J. A. Castro-Correa, J. H. Giraldo, M. Badiey, and F. D. M alliaros, “Gegenbauer graph neural networks for time-varying signal reconstruc- tion,” IEEE Transactions on Neural Networks and Learning Systems , 2024
work page 2024
-
[30]
Nonconvex optimization fo r robust tensor completion from grossly sparse observations,
X. Zhao, M. Bai, and M. K. Ng, “Nonconvex optimization fo r robust tensor completion from grossly sparse observations,” Journal of Scien- tific Computing , vol. 85, no. 2, p. 46, 2020
work page 2020
-
[31]
Y . Liang, Z. Zhao, and L. Sun, “Dynamic spatiotemporal g raph convolu- tional neural networks for traffic data imputation with comp lex missing patterns,” arXiv preprint arXiv:2109.08357 , 2021
-
[32]
Spatial–tempor al traffic modeling with a fusion graph reconstructed by tensor decomp osition,
Q. Li, X. Y ang, Y . Wang, Y . Wu, and D. He, “Spatial–tempor al traffic modeling with a fusion graph reconstructed by tensor decomp osition,” IEEE Transactions on Intelligent Transportation Systems , vol. 25, no. 2, pp. 1749–1760, 2023
work page 2023
-
[33]
Network topology infer- ence from smooth signals under partial observability,
C. Peng, H. Tang, Z. Wang, and X. Shen, “Network topology infer- ence from smooth signals under partial observability,” arXiv preprint arXiv:2410.05707, 2024
-
[34]
Joint network topology inference in the presence of hidden nodes,
M. Navarro, S. Rey, A. Buciulea, A. G. Marques, and S. Seg arra, “Joint network topology inference in the presence of hidden nodes, ” IEEE Transactions on Signal Processing , 2024
work page 2024
-
[35]
L earning spatio-temporal graphical models from incomplete observa tions,
A. Javaheri, A. Amini, F. Marvasti, and D. P . Palomar, “L earning spatio-temporal graphical models from incomplete observa tions,” IEEE Transactions on Signal Processing , 2024
work page 2024
-
[36]
P . Holme and J. Saram¨ aki, “Temporal networks,” Physics Reports , vol. 519, no. 3, pp. 97–125, 2012
work page 2012
-
[37]
The joint graphic al Lasso for inverse covariance estimation across multiple classes ,
P . Danaher, P . Wang, and D. M. Witten, “The joint graphic al Lasso for inverse covariance estimation across multiple classes ,” Journal of the Royal Statistical Society Series B: Statistical Method ology, vol. 76, no. 2, pp. 373–397, 2014
work page 2014
-
[38]
Similarity network fus ion for aggregating data types on a genomic scale,
B. Wang, A. M. Mezlini, F. Demir, M. Fiume, Z. Tu, M. Brudn o, B. Haibe-Kains, and A. Goldenberg, “Similarity network fus ion for aggregating data types on a genomic scale,” Nature Methods , vol. 11, no. 3, pp. 333–337, 2014
work page 2014
-
[39]
S. Kim and E. P . Xing, “Tree-guided group lasso for multi -response regression with structured sparsity, with an application t o eqtl mapping,” The Annals of Applied Statistics , vol. 6, no. 3, p. 1095–1117, 2012
work page 2012
-
[40]
Ne twork modelling methods for FMRI,
S. M. Smith, K. L. Miller, G. Salimi-Khorshidi, M. Webst er, C. F. Beckmann, T. E. Nichols, J. D. Ramsey, and M. W. Woolrich, “Ne twork modelling methods for FMRI,” NeuroImage, vol. 54, no. 2, pp. 875–891, 2011
work page 2011
-
[41]
Optimizat ion al- gorithms for graph Laplacian estimation via ADMM and MM,
L. Zhao, Y . Wang, S. Kumar, and D. P . Palomar, “Optimizat ion al- gorithms for graph Laplacian estimation via ADMM and MM,” IEEE Transactions on Signal Processing, vol. 67, no. 16, pp. 4231–4244, 2019
work page 2019
-
[42]
Spectral re gularization algorithms for learning large incomplete matrices,
R. Mazumder, T. Hastie, and R. Tibshirani, “Spectral re gularization algorithms for learning large incomplete matrices,” The Journal of Machine Learning Research , vol. 11, pp. 2287–2322, 2010
work page 2010
-
[43]
Time-va rying graph signal reconstruction,
K. Qiu, X. Mao, X. Shen, X. Wang, T. Li, and Y . Gu, “Time-va rying graph signal reconstruction,” IEEE Journal of Selected Topics in Signal Processing, vol. 11, no. 6, pp. 870–883, 2017
work page 2017
-
[44]
Y . Xu and W. Yin, “A block coordinate descent method for r egularized multiconvex optimization with applications to nonnegativ e tensor fac- torization and completion,” SIAM Journal on Imaging Sciences , vol. 6, no. 3, pp. 1758–1789, 2013
work page 2013
-
[45]
H. Attouch, J. Bolte, P . Redont, and A. Soubeyran, “Prox imal alternating minimization and projection methods for nonconvex problem s: An approach based on the Kurdyka-Łojasiewicz inequality,” Mathematics of Operations Research , vol. 35, no. 2, pp. 438–457, 2010
work page 2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.