Building Network Digital Twins Part II: Real-Time Adaptive PID for Enhanced State Synchronization
Pith reviewed 2026-05-18 04:48 UTC · model grok-4.3
The pith
An adaptive PID controller integrated into network digital twins improves real-time synchronization with the physical mobile network.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors implement a framework that adds an adaptive PID controller to network digital twins so that synchronization between the physical network and its replica can adjust on the fly to changing traffic and device conditions, with an interactive user interface confirming reduced synchronization error in real-time traffic flows.
What carries the argument
The adaptive Proportional-Integral-Derivative (PID) controller, which continuously tunes its gains to minimize the difference between observed physical-network state and the digital twin state.
If this is right
- Real-time traffic replication between physical network and digital twin becomes feasible under higher device density.
- Network operators can run scenario tests on the twin without risking live service disruption.
- State synchronization error decreases as the controller responds to changing network conditions.
Where Pith is reading between the lines
- The same controller structure could be tested on digital twins of non-mobile networks such as industrial IoT deployments.
- If synchronization latency falls, operators might reduce the frequency of physical measurements needed to keep the twin current.
- A follow-up experiment could compare the adaptive PID against simpler threshold-based sync rules on the same traces.
Load-bearing premise
An adaptive PID controller can be tuned or adjusted in real time to cope with the dynamism and heterogeneity of mobile networks even though the adaptation rules themselves are not specified.
What would settle it
Run the same mobile-network trace with and without the adaptive PID in the digital-twin loop and measure whether the maximum or average state-synchronization error drops measurably.
Figures






read the original abstract
As we evolve towards more heterogeneous and cutting-edge mobile networks, Network Digital Twins (NDTs) are proving to be a promising paradigm in solving challenges faced by network operators, as they give a possibility of replicating the physical network operations and testing scenarios separately without interfering with the live network. However, with mobile networks becoming increasingly dynamic and heterogeneous due to massive device connectivity, replicating traffic and having NDTs synchronized in real-time with the physical network remains a challenge, thus necessitating the need to develop real-time adaptive mechanisms to bridge this gap. In this part II of our work, we implement a novel framework that integrates an adaptive Proportional-Integral-Derivative (PID) controller to dynamically improve synchronization. Additionally, through an interactive user interface, results of our enhanced approach demonstrate an improvement in real-time traffic synchronization.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents Part II of work on Network Digital Twins (NDTs) for mobile networks, claiming to implement a novel framework that integrates an adaptive PID controller to achieve real-time state synchronization between the physical network and the NDT. It highlights challenges from dynamic and heterogeneous traffic due to massive device connectivity and asserts that the approach, demonstrated via an interactive user interface, yields improved real-time traffic synchronization.
Significance. If the adaptation law, error metric, and quantitative validation were supplied, the work could provide a practical control-theoretic method for maintaining NDT fidelity in evolving mobile networks, addressing a recognized operational gap for operators who need non-disruptive testing. The emphasis on real-time adaptivity and UI visualization has potential usability value, but the current lack of technical substance prevents any assessment of whether the result advances the state of the art beyond a fixed-gain PID or improved simulation setup.
major comments (2)
- [Abstract] Abstract: The central claim that the adaptive PID controller 'dynamically improve synchronization' supplies neither the adaptation rule (e.g., gain-update law, reference-model error, or Lyapunov function), the precise synchronization error signal (packet delay, state-vector difference, or traffic-volume mismatch), nor any quantitative metrics, baseline comparisons, or error analysis. Without these elements the improvement cannot be attributed to adaptivity and the claim remains untestable.
- [Framework description] Framework description: The integration of the adaptive PID is presented as the solution to increasing dynamism and heterogeneity, yet no concrete mechanism is given for real-time gain adjustment or for handling heterogeneous mobile traffic patterns. This omission is load-bearing for the paper's assertion that the controller bridges the synchronization gap.
minor comments (2)
- [Abstract] The abstract would be strengthened by the inclusion of at least one key performance indicator (e.g., synchronization error reduction or latency) even in summary form.
- Consider adding citations to prior literature on PID-based synchronization or model-reference adaptive control in networked systems to clarify the novelty of the proposed adaptation approach.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We agree that the manuscript requires additional technical detail on the adaptive PID controller to allow proper evaluation of the contribution. Below we respond point-by-point to the major comments and indicate the revisions that will be incorporated.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the adaptive PID controller 'dynamically improve synchronization' supplies neither the adaptation rule (e.g., gain-update law, reference-model error, or Lyapunov function), the precise synchronization error signal (packet delay, state-vector difference, or traffic-volume mismatch), nor any quantitative metrics, baseline comparisons, or error analysis. Without these elements the improvement cannot be attributed to adaptivity and the claim remains untestable.
Authors: We agree that the abstract (and the corresponding sections of the manuscript) does not supply the adaptation rule, the exact definition of the synchronization error, or quantitative validation. This omission prevents readers from assessing whether the reported improvement stems from adaptivity. In the revised version we will expand the abstract to state that a Lyapunov-based model-reference adaptive law is used for online gain updates, that the error signal is the state-vector difference between the physical network and the NDT, and that the results section will report quantitative metrics (e.g., mean synchronization error reduction relative to a fixed-gain PID baseline together with error bounds and statistical comparisons). revision: yes
-
Referee: [Framework description] Framework description: The integration of the adaptive PID is presented as the solution to increasing dynamism and heterogeneity, yet no concrete mechanism is given for real-time gain adjustment or for handling heterogeneous mobile traffic patterns. This omission is load-bearing for the paper's assertion that the controller bridges the synchronization gap.
Authors: We concur that the framework description currently remains at a high level and does not articulate the real-time gain-adjustment equations or the specific handling of heterogeneous traffic. We will revise the framework section to include the explicit adaptation law (parameter update equations driven by the tracking error), describe how the controller estimates time-varying traffic parameters online, and explain the mechanism by which different traffic classes (e.g., bursty vs. steady-state flows) trigger distinct gain trajectories while preserving stability. revision: yes
Circularity Check
No circularity: implementation claim stands independent of inputs
full rationale
The paper presents an engineering implementation of an adaptive PID controller for NDT synchronization. No derivation chain, equations, fitted parameters, or self-citations are shown that reduce the central claim to its own inputs by construction. The result is framed as an outcome of the framework rather than a prediction forced by prior definitions or fits, rendering the work self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
K. Kaur, V . Mangat, and K. Kumar, A comprehensive survey of service function chain provisioning approaches in SDN and NFV architecture, Computer Science Review, vol. 38, p. 100298, 2020, doi: 10.1016/j.cosrev.2020.100298
-
[2]
Y . Wu, K. Zhang, and Y . Zhang, Digital twin networks: A survey, IEEE Internet of Things Journal, vol. 8, no. 18, pp. 13789–13804, 2021, doi: 10.1109/JIOT.2021.3079510
-
[3]
H. Nan, R. Li, X. Zhu, J. Ma, and D. Niyato, An efficient data-driven traffic prediction framework for network digital twin, IEEE Network, vol. 38, no. 1, pp. 22–29, Jan. 2024, doi: 10.1109/MNET.2023.3335952
-
[4]
J. Sengendo and F. Granelli, Building Network Digital Twins Part I: State Synchronization, 2024 3rd International Conference on 6G Networking (6GNet), Paris, France, 2024, pp. 182-188, doi: 10.1109/6GNet63182.2024.10765759
-
[5]
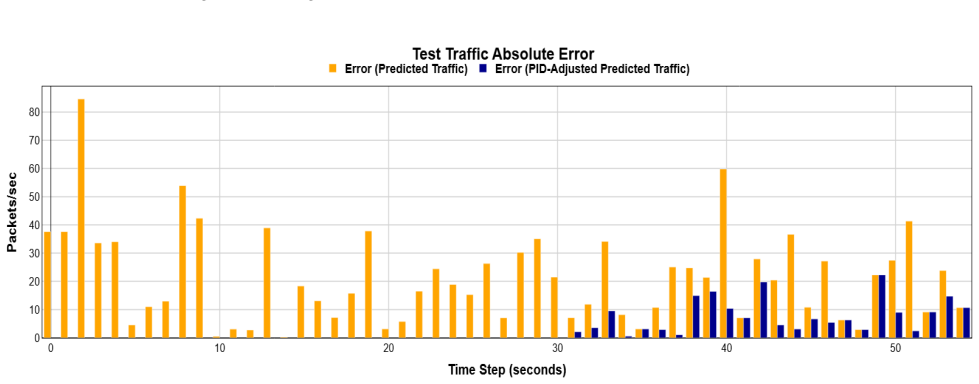
X. Lin, L. Kundu, C. Dick, E. Obiodu, T. Mostak, and M. Flaxman, 6G Digital Twin Networks: From Theory to Practice, IEEE Com- munications Magazine, vol. 61, no. 11, pp. 72–78, Nov. 2023, doi: 10.1109/MCOM.001.2200830. Fig. 6: Live Digital Twin user interface with real-time visualizations of traffic Fig. 7: Real-time error analysis depicting improved perfo...
-
[6]
H. Weytjens and J. De Weerdt, Process outcome prediction: CNN vs. LSTM (with attention), A. Del R ´ıo Ortega, H. Leopold, and F. M. Santoro, vol. 397, Cham: Springer, 2020. doi: 10.1007/978-3-030- 66498-5 24
-
[7]
S. Gopali, F. Abri, S. Siami-Namini, and A. Siami Namin, A comparison of TCN and LSTM models in detecting anomalies in time series data, IEEE International conference on Big Data (Big Data), 2021, pp. 2415–2420, doi: 10.1109/BigData52589.2021.9671488
-
[8]
B. Qin, H. Pan, Y . Dai, X. Si, X. Huang, C. Yuen, and Y . Zhang, Machine and deep learning for digital twin networks: A survey, IEEE Internet of Things Journal, vol. 11, no. 21, pp. 34694–34716, 2024, doi: 10.1109/JIOT.2024.3416733
-
[9]
L. Nie, X. Wang, Q. Zhao, Z. Shang, L. Feng, and G. Li, Digital twin for transportation big data: A reinforcement learning-based network traffic prediction approach, IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 1, pp. 896–906, 2024, doi: 10.1109/TITS.2022.3232518
-
[10]
J. Zheng, T. H. Luan, Y . Zhang, R. Li, Y . Hui, L. Gao, and M. Dong, Data synchronization in vehicular digital twin network: A game theo- retic approach, IEEE Transactions on Wireless Communications, vol. 22, no. 11, pp. 7635–7647, 2023, doi: 10.1109/TWC.2023.3254158
-
[11]
B. Tan and A. Matta, The digital twin synchronization problem: Framework, formulations, and analysis, IISE Transactions, vol. 56, no. 6, pp. 652–665, 2023, doi: 10.1080/24725854.2023.2253869
-
[12]
Y . Weng, J. Xie, S. Y . R. Hui, C. Wen, and H. D. Nguyen, State synchronization for dual digital twin of EV batteries by Lyapunov sta- bility condition and contraction analysis, IECON 2023 - 49th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 2023, pp. 1–6, doi: 10.1109/IECON51785.2023.10312530
-
[13]
Z. Xiang, S. Pandi, J. Cabrera, F. Granelli, P. Seeling, and F. H. P. Fitzek, An open source testbed for virtualized communication networks, IEEE Communications Magazine, vol. 59, no. 2, pp. 77–83, 2021, doi: 10.1109/MCOM.001.2000578
-
[14]
K. Wang, K. Li, L. Zhou, Y . Hu, Z. Cheng, J. Liu, and C. Chen, Multiple convolutional neural networks for multivariate time se- ries prediction, Neurocomputing, vol. 360, pp. 107–119, 2019, doi: 10.1016/j.neucom.2019.05.023
-
[15]
T. Hodson, Root-mean-square error (RMSE) or mean absolute error (MAE): When to use them or not, Geoscientific Model Development, 2022, doi: 10.5194/gmd-15-5481-2022
-
[16]
C. Zhao and L. Guo, Control of nonlinear uncertain systems by extended PID, IEEE Transactions on Automatic Control, vol. 66, no. 8, pp. 3840–3847, Aug. 2021, doi: 10.1109/TAC.2020.3030876
-
[17]
M. Khorasani, M. Abdou, and J. Hern ´andez Fern ´andez, Web Ap- plication Development with Streamlit: Develop and Deploy Secure and Scalable Web Applications to the Cloud Using a Pure Python Framework, Apress, 2022, doi: 10.1007/978-1-4842-8111-6
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.