Model-free source seeking of exponentially convergent unicycle: theoretical and robotic experimental results
Pith reviewed 2026-05-18 02:09 UTC · model grok-4.3
The pith
A unicycle can locate the peak of an unknown higher-power signal using only real-time measurements and converges exponentially fast.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The introduced unicycle source-seeking law achieves exponential convergence to the extremum of objective functions or scalar signals that behave locally like a higher-degree power function near the peak, as opposed to the locally quadratic behavior required by prior designs. The controller operates without a model of either the vehicle dynamics or the signal shape and relies solely on real-time measurements. The exponential rate is established by Lyapunov analysis adapted to the non-quadratic local geometry, and the same law is shown to remain effective when the measurements contain bounded noise or constant time delays.
What carries the argument
The exponentially convergent unicycle extremum-seeking law, which filters the measured signal and uses the filtered output to adjust angular velocity so that the vehicle’s circular motion produces an exponentially decaying offset from the peak.
If this is right
- The same control structure works for signals whose local shape is flatter or steeper than quadratic, widening the class of fields for which exponential convergence is guaranteed.
- Simulations show the design tolerates measurement delays and additive noise while preserving the exponential rate.
- Physical experiments confirm that the theoretical convergence can be observed on hardware despite real sensor and actuator imperfections.
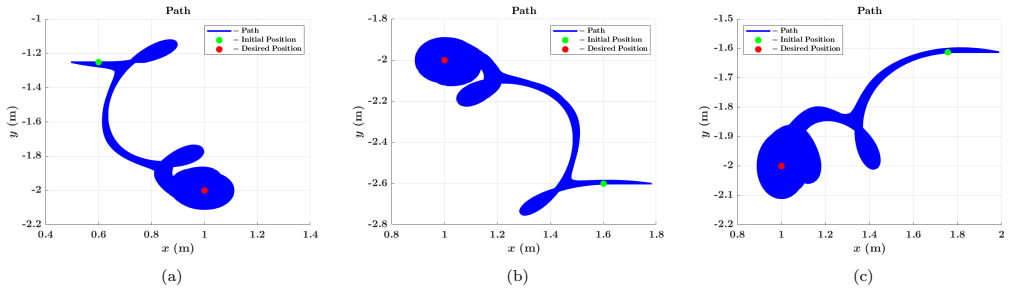
- Different initial conditions do not alter the exponential character of the approach to the peak.
Where Pith is reading between the lines
- The method could be adapted to other nonholonomic platforms such as differential-drive robots or car-like vehicles that must follow similar circular excitation patterns.
- If the local power degree is unknown in advance, an online estimator of that degree might preserve the exponential property across a broader range of signals.
- The experimental success suggests the controller could be tested on aerial or marine robots for locating chemical or acoustic sources whose fields are known to be non-quadratic.
Load-bearing premise
The objective function or signal must behave locally like a higher-degree power function near its extremum.
What would settle it
Apply the controller to a field whose local Taylor expansion is purely quadratic and measure whether the position error still decays exponentially or reverts to a slower convergence rate.
Figures














read the original abstract
This paper introduces a novel model-free, real-time unicycle-based source seeking design. This design autonomously steers the unicycle dynamic system towards the extremum point of an objective function or physical/scalar signal that is unknown expression-wise, but accessible via measurements. A key contribution of this paper is that the introduced design converges exponentially to the extremum point of objective functions (or scalar signals) that behave locally like a higher-degree power function (e.g., fourth-degree polynomial function) as opposed to locally quadratic objective functions, the usual case in literature. We provide theoretical results and design characterization, supported by a variety of simulation results that demonstrate the robustness of the proposed design, including cases with different initial conditions and measurement delays/noise. Also, for the first time in the literature, we provide experimental robotic results that demonstrate the effectiveness of the proposed design and its exponential convergence ability. These experimental results confirm that the proposed exponentially convergent extremum seeking design can be practically realized on a physical robotic platform under real-world sensing and actuation constraints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a model-free extremum-seeking control law for unicycle robots that steers the system to the extremum of an unknown scalar field. The key theoretical contribution is exponential convergence when the field is locally equivalent to a higher-degree power function (such as a fourth-degree polynomial), in contrast to the standard quadratic local approximation in extremum-seeking literature. The claims are supported by averaging analysis, Lyapunov stability proofs, numerical simulations under various conditions including noise and delays, and physical experiments on a robotic platform.
Significance. If the exponential convergence result holds under the stated local homogeneity assumption, this extends extremum-seeking control theory to a wider class of objective functions, potentially improving performance in applications where fields are flatter or steeper than quadratic near the source. The provision of robotic experimental results is notable as it demonstrates practical feasibility under real sensing and actuation constraints, addressing a gap in the literature.
major comments (2)
- [§4, Eq. (18)] §4 (Averaging Analysis), Eq. (18): The derivation of the averaged closed-loop dynamics assumes the measured signal is exactly a homogeneous polynomial of degree 4; no explicit bound or robustness margin is provided against residual lower-order (e.g., quadratic) terms that could dominate near the origin and destroy the exponential rate while preserving asymptotic convergence.
- [Theorem 2 (§5)] Theorem 2 (§5): The Lyapunov function and its Lie derivative are constructed and shown negative definite only for the pure higher-degree homogeneous case. The proof does not address how the negative-definiteness margin behaves under additive non-homogeneous perturbations, which is load-bearing for the central exponential-convergence claim.
minor comments (2)
- [Figure 5] Figure 5 caption: specify the exact noise variance and delay values used in the Monte-Carlo runs to allow reproducibility.
- [§3.1] The notation for the dither signals in §3.1 is introduced without an explicit table comparing it to standard ES dithers; a short comparison table would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive and insightful comments, which help clarify the scope of our exponential convergence results. We respond to each major comment below and indicate the revisions we will make to the manuscript.
read point-by-point responses
-
Referee: [§4, Eq. (18)] §4 (Averaging Analysis), Eq. (18): The derivation of the averaged closed-loop dynamics assumes the measured signal is exactly a homogeneous polynomial of degree 4; no explicit bound or robustness margin is provided against residual lower-order (e.g., quadratic) terms that could dominate near the origin and destroy the exponential rate while preserving asymptotic convergence.
Authors: Our averaging analysis in Section 4 and the closed-loop dynamics in Eq. (18) are derived under the standing assumption, stated in the problem setup and abstract, that the unknown field is locally equivalent to a homogeneous polynomial of degree 4. This local equivalence means the degree-4 term is the leading term in a neighborhood of the source. We agree that an explicit robustness margin against lower-order perturbations would strengthen the presentation. In the revised version we will insert a remark after Eq. (18) that qualitatively discusses how small additive lower-order terms affect the averaged system and notes that exponential convergence is retained only when the higher-degree term remains dominant; otherwise the rate may degrade to asymptotic convergence. A brief continuity argument supporting this observation will be included. revision: yes
-
Referee: [Theorem 2 (§5)] Theorem 2 (§5): The Lyapunov function and its Lie derivative are constructed and shown negative definite only for the pure higher-degree homogeneous case. The proof does not address how the negative-definiteness margin behaves under additive non-homogeneous perturbations, which is load-bearing for the central exponential-convergence claim.
Authors: Theorem 2 proves exponential stability of the averaged system for the exact homogeneous degree-4 case via a Lyapunov function constructed specifically for that structure. The referee correctly observes that the proof does not quantify the margin under additive non-homogeneous perturbations. We will revise the paragraph immediately following Theorem 2 to add a short discussion clarifying that, by standard perturbation results for homogeneous systems, sufficiently small non-homogeneous terms preserve local negative definiteness of the Lie derivative in a suitably restricted neighborhood; however, a complete robust-stability analysis lies outside the present scope. This addition will explicitly delimit the exponential-convergence claim without altering the theorem statement itself. revision: partial
Circularity Check
No significant circularity; derivation relies on standard averaging and Lyapunov analysis under explicit homogeneity assumption
full rationale
The paper presents a model-free unicycle source-seeking controller whose exponential convergence is established via averaging theory and a Lyapunov function constructed for the closed-loop averaged system when the objective is locally homogeneous of degree greater than 2. The design equations (control law, dither signals, and demodulation) are stated explicitly and do not define the convergence rate or equilibrium in terms of themselves. The higher-order homogeneity is introduced as an assumption on the unknown signal, not recovered from the controller equations. No load-bearing self-citation chain, fitted-parameter prediction, or ansatz smuggling is required for the central stability claim; the proof treats the pure-power case and notes the local nature of the result. The robotic experiments serve as validation rather than part of the derivation. Consequently the claimed exponential convergence does not reduce to the inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Unicycle kinematics follow the standard nonholonomic differential-drive model.
- domain assumption The unknown objective function or scalar signal admits a local higher-degree power approximation near its extremum.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Assumption 1 … α1∥x−x∗∥m ≤ J(x)−J∗ ≤ α2∥x−x∗∥m … m=4 … third-order Lie bracket … gIN(J(x)) = −cN J(N−1)(x)
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Theorem 1 … exponential stability of the equilibrium … V(ξ,η)=½ξ²+½η²+γξη … ˙V ≤ −μ(ξ²+η²)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Ariyur, K.B. and Krstic, M. (2003). Real-time optimization by extremum-seeking control. John Wiley & Sons
work page 2003
-
[2]
Bajpai, S. (2024). Investigating the Performance of Different Controllers in Optimized Path Tracking in Robotics: A Lie Bracket System and Extremum Seeking Approach. Master's thesis, University of Cincinnati
work page 2024
-
[3]
Bajpai, S., Elgohary, A.A., and Eisa, S.A. (2024). Model-free source seeking by a novel single-integrator with attenuating oscillations and better convergence rate: Robotic experiments. In 2024 European Control Conference (ECC), 472--479. IEEE
work page 2024
-
[4]
Bulgur, E.A., Demircioglu, H., and Basturk, H.I. (2018). Light source tracking with quadrotor by using extremum seeking control. In 2018 Annual American Control Conference (ACC), 1746--1751. IEEE
work page 2018
-
[5]
Calli, B., Caarls, W., Jonker, P., and Wisse, M. (2012). Comparison of extremum seeking control algorithms for robotic applications. In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, 3195--3202. IEEE
work page 2012
-
[6]
Cochran, J., Siranosian, A., Ghods, N., and Krstic, M. (2009). 3-d source seeking for underactuated vehicles without position measurement. IEEE Transactions on Robotics, 25(1), 117--129
work page 2009
-
[7]
Dochain, D., Perrier, M., and Guay, M. (2011). Extremum seeking control and its application to process and reaction systems: A survey. Mathematics and Computers in Simulation, 82(3), 369--380
work page 2011
-
[8]
D \"u rr, H.B., Stankovi \'c , M.S., Ebenbauer, C., and Johansson, K.H. (2013). Lie bracket approximation of extremum seeking systems. Automatica, 49(6), 1538--1552
work page 2013
-
[9]
Eisa, S.A. and Pokhrel, S. (2023). Analyzing and mimicking the optimized flight physics of soaring birds: A differential geometric control and extremum seeking system approach with real time implementation. SIAM Journal on Applied Mathematics, S82--S104
work page 2023
-
[10]
Elgohary, A.A. and Eisa, S.A. (2025 a ). Extremum seeking for controlled vibrational stabilization of mechanical systems: A variation-of-constant averaging approach inspired by flapping insects mechanics. IEEE Control Systems Letters
work page 2025
-
[11]
Elgohary, A.A. and Eisa, S.A. (2025 b ). Hovering flight in flapping insects and hummingbirds: A natural real-time and stable extremum-seeking feedback system. Physical Review E, 112(4), 044412
work page 2025
- [12]
-
[13]
Gauthier, J.P. and Kawski, M. (2014). Minimal complexity sinusoidal controls for path planning. Proc. 53rd IEEE CDC, 3731--3736
work page 2014
-
[14]
Ghadiri-Modarres, M. and Mojiri, M. (2020). Normalized extremum seeking and its application to nonholonomic source localization. IEEE Transactions on automatic control, 66(5), 2281--2288
work page 2020
-
[15]
Ghods, N. (2011). Extremum seeking for mobile robots. University of California, San Diego
work page 2011
-
[16]
Grushkovskaya, V. and Eisa, S.A. (2025). Extremum seeking with high-order lie bracket approximations: Achieving exponential decay rate. accepted in the IEEE Conference on Decision and Control (CDC), avialable as arXiv:2504.01136
- [17]
-
[18]
Grushkovskaya, V. and Zuyev, A. (2024). Design of stabilizing feedback controllers for high-order nonholonomic systems. IEEE Control Systems Letters, 8, 988--993
work page 2024
- [19]
-
[20]
Guay, M. and Dochain, D. (2015). A time-varying extremum-seeking control approach. Automatica, 51, 356--363
work page 2015
-
[21]
Khalil, H.K. and Grizzle, J.W. (2002). Nonlinear systems. Prentice hall Upper Saddle River, NJ, 3 edition
work page 2002
-
[22]
Khong, S.Z., Tan, Y., Manzie, C., and Ne s i \'c , D. (2014). Multi-agent source seeking via discrete-time extremum seeking control. Automatica, 50(9), 2312--2320
work page 2014
-
[23]
Krstic, M. and Cochran, J. (2008). Extremum seeking for motion optimization: From bacteria to nonholonomic vehicles. In 2008 Chinese Control and Decision Conference, 18--27. IEEE
work page 2008
-
[24]
Li, S., Kong, R., and Guo, Y. (2014). Cooperative distributed source seeking by multiple robots: Algorithms and experiments. IEEE/ASME Transactions on mechatronics, 19(6), 1810--1820
work page 2014
-
[25]
Maggia, M., Eisa, S.A., and Taha, H.E. (2020). On higher-order averaging of time-periodic systems: reconciliation of two averaging techniques. Nonlinear Dynamics, 99(1), 813--836
work page 2020
-
[26]
Matveev, A.S., Teimoori, H., and Savkin, A.V. (2011). Navigation of a unicycle-like mobile robot for environmental extremum seeking. Automatica, 47(1), 85--91
work page 2011
-
[27]
Modeling, dynamics and control lab
MDCL (2025). Modeling, dynamics and control lab. ://sites.google.com/view/uc-aeem-mdcl/home
work page 2025
- [28]
- [29]
-
[30]
Pokhrel, S. and Eisa, S.A. (2022). A novel hypothesis for how albatrosses optimize their flight physics in real-time: an extremum seeking model and control for dynamic soaring. Bioinspiration & Biomimetics, 18(1), 016014
work page 2022
-
[31]
Pokhrel, S. and Eisa, S.A. (2023). Higher order lie bracket approximation and averaging of control-affine systems with application to extremum seeking. available as arXiv preprint arXiv:2310.07092
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[32]
Pokhrel, S., Elgohary, A.A., and Eisa, S. (2024). Extremum seeking by multi-agent vehicles and uavs with no steady state oscillation using a geometric-based kalman filtering. In AIAA SCITECH 2024 Forum, 0724
work page 2024
-
[33]
Scheinker, A. (2017). Bounded extremum seeking for angular velocity actuated control of nonholonomic unicycle. Optimal Control Applications and Methods, 38(4), 575--585
work page 2017
-
[34]
Scheinker, A. (2024). 100 years of extremum seeking: A survey. Automatica, 161, 111481
work page 2024
-
[35]
Suttner, R. and Krsti \'c , M. (2022). Source seeking with a torque-controlled unicycle. IEEE Control Systems Letters, 7, 79--84
work page 2022
-
[36]
Tan, Y., Moase, W., Manzie, C., Ne s i\' c , D., and Mareels, I.M.Y. (2010). Extremum seeking from 1922 to 2010. In Proc. 29th Chinese Control Conf., 14--26
work page 2010
-
[37]
Todorovski, V. and Krsti \'c , M. (2024). Newton nonholonomic source seeking for distance-dependent maps. IEEE Transactions on Automatic Control, 70(1), 510--517
work page 2024
-
[38]
Yilmaz, C.T., Diagne, M., and Krstic, M. (2025). Unbiased extremum seeking based on lie bracket averaging. In 2025 American Control Conference (ACC), 3041--3046. IEEE
work page 2025
-
[39]
Zhu, S., Wang, D., and Low, C.B. (2013). Cooperative control of multiple uavs for moving source seeking. In 2013 International Conference on Unmanned Aircraft Systems (ICUAS), 193--202. IEEE
work page 2013
-
[40]
, " * write output.state after.block = add.period write newline
ENTRY address author booktitle chapter doi edition editor eid howpublished institution journal key month note number organization pages publisher school series title type url volume year label extra.label sort.label short.list INTEGERS output.state before.all mid.sentence after.sentence after.block FUNCTION init.state.consts #0 'before.all := #1 'mid.sent...
-
[41]
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION word.in bbl.in capitalize " " * FUNCT...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.