Dynamically Extensible and Retractable Robotic Leg Linkages for Multi-task Execution in Search and Rescue Scenarios
Pith reviewed 2026-05-17 21:40 UTC · model grok-4.3
The pith
A morphing five-bar linkage in robotic legs switches between long strides for terrain and high force for rescue tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a dynamically extensible and retractable five-bar linkage design for robot legs enables a geometric transformation to switch between height-advantaged and force-advantaged configurations, thereby supporting both rapid navigation on uneven terrain and high-force output for rescue operations, as shown by performance analyses on stride length, force, and stability.
What carries the argument
Dynamically extensible and retractable five-bar linkage that transforms geometry to prioritize either stride height or force output.
If this is right
- The design supports variable stride lengths suited to different terrains.
- Higher force output becomes available in the retracted configuration for rescue tasks.
- Stability is preserved in both height and force modes per testbed evaluations.
- This single mechanism reduces the need for multiple robot types in SAR missions.
Where Pith is reading between the lines
- If the leg integrates well into full robots, it may enable more compact and versatile SAR platforms.
- Similar geometric switching could apply to other mechanisms needing adjustable leverage, like arms in manipulation tasks.
- Future work might explore energy costs of switching between modes during continuous operation.
Load-bearing premise
That the benefits seen in the single-leg testbed will carry over to a complete robot without introducing stability problems or mechanical issues on real terrain under load.
What would settle it
Mounting multiple such legs on a robot and running it through SAR-like tasks on actual uneven ground with extraction loads, then measuring if stride, force, and stability match or exceed testbed levels.
Figures










read the original abstract
Search and rescue (SAR) robots are required to quickly traverse terrain and perform high-force rescue tasks, necessitating both terrain adaptability and controlled high-force output. Few platforms exist today for SAR, and fewer still have the ability to cover both tasks of terrain adaptability and high-force output when performing extraction. While legged robots offer significant ability to traverse uneven terrain, they typically are unable to incorporate mechanisms that provide variable high-force outputs, unlike traditional wheel-based drive trains. This work introduces a novel concept for a dynamically extensible and retractable robot leg. Leveraging a dynamically extensible and retractable five-bar linkage design, it allows for mechanically switching between height-advantaged and force-advantaged configurations via a geometric transformation. A testbed evaluated leg performance across linkage geometries and operating modes, with empirical and analytical analyses conducted on stride length, force output, and stability. The results demonstrate that the morphing leg offers a promising path toward SAR robots that can both navigate terrain quickly and perform rescue tasks effectively.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces a dynamically extensible and retractable five-bar linkage design for robotic legs intended for search and rescue (SAR) applications. The mechanism enables geometric reconfiguration to switch between height-advantaged configurations for terrain adaptability (stride length) and force-advantaged configurations for high-force rescue tasks. A single-leg testbed is used to conduct empirical and analytical evaluations of stride length, force output, and stability across different linkage geometries and operating modes, leading to the conclusion that the morphing leg offers a promising path toward versatile SAR robots.
Significance. If the single-leg testbed metrics prove transferable, the geometric reconfiguration approach could provide a mechanically simple means for legged platforms to address both mobility and high-force extraction without hybrid actuation schemes, filling a noted gap in current SAR robotics. The testbed-based validation of mode switching is a concrete step toward demonstrating variable mechanical advantage.
major comments (2)
- [Abstract] Abstract: The abstract states that empirical and analytical analyses were performed on stride, force, and stability, yet supplies no quantitative results, error bars, or exclusion criteria; the central claim of a 'promising path' therefore rests on an unevidenced summary.
- [Testbed evaluation] Testbed evaluation: The reported performance is measured on an isolated single-leg testbed. No data or analysis addresses inter-leg coordination, control latency during extension/retraction mode switches, load sharing, or platform-level stability under payload on real terrain, leaving the translation to a complete multi-legged SAR robot untested.
minor comments (2)
- [Introduction] The introduction repeats the limitations of existing legged robots; condensing this discussion would improve flow.
- Figure captions for the linkage configurations should explicitly label the height-advantaged versus force-advantaged geometries and include scale bars.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed feedback on our manuscript. We address each major comment below in a point-by-point manner and indicate the revisions we have made or plan to make in the next version of the paper.
read point-by-point responses
-
Referee: [Abstract] Abstract: The abstract states that empirical and analytical analyses were performed on stride, force, and stability, yet supplies no quantitative results, error bars, or exclusion criteria; the central claim of a 'promising path' therefore rests on an unevidenced summary.
Authors: We agree that the abstract would be strengthened by the inclusion of specific quantitative results. In the revised manuscript we have updated the abstract to report key empirical findings, including measured stride length increases, peak force outputs, and stability metrics, together with associated error bars and a brief statement of the experimental conditions and data exclusion criteria used. revision: yes
-
Referee: [Testbed evaluation] Testbed evaluation: The reported performance is measured on an isolated single-leg testbed. No data or analysis addresses inter-leg coordination, control latency during extension/retraction mode switches, load sharing, or platform-level stability under payload on real terrain, leaving the translation to a complete multi-legged SAR robot untested.
Authors: The manuscript deliberately centers on the design and isolated validation of the five-bar linkage mechanism itself. A single-leg testbed was chosen to enable precise, repeatable measurement of the geometric reconfiguration effects on stride, force, and stability without confounding variables from multi-leg dynamics. We acknowledge that inter-leg coordination, control latency during mode switches, load sharing, and full-platform stability on real terrain remain untested in the present work. We have added a new subsection in the discussion that explicitly states these limitations and outlines the planned next steps toward multi-legged integration. We maintain that the single-leg results constitute a necessary and rigorous foundation for the claims regarding the linkage's variable mechanical advantage. revision: partial
Circularity Check
No circularity: results rest on direct testbed measurements
full rationale
The paper introduces a five-bar morphing linkage and reports performance via empirical and analytical analyses on an isolated testbed for stride length, force output, and stability. No equations, fitted parameters, or self-citations appear in the provided text that would reduce any reported metric to a quantity defined by the authors' own prior choices or inputs. The central claim is supported by external experimental data rather than any self-definitional loop, fitted-input prediction, or load-bearing self-citation chain. This is a standard hardware validation paper whose derivation chain is self-contained against the testbed measurements.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Five-bar linkage kinematics follow standard planar rigid-body motion equations.
- domain assumption The testbed measurements accurately reflect isolated leg behavior under controlled conditions.
Reference graph
Works this paper leans on
-
[1]
, and singularity-free zones [21]. Quadruped control strategies [22] and direct-drive comparisons [23] established critical performance baselines, while dyno-kinematic ap- proaches [24] extended dynamic capabilities. Despite these advancements, all implementations fundamentally lack real- time reconfiguration – amphibious designs [17] cannot tran- sition ...
-
[2]
These workspace boundaries are singularities of the linkage
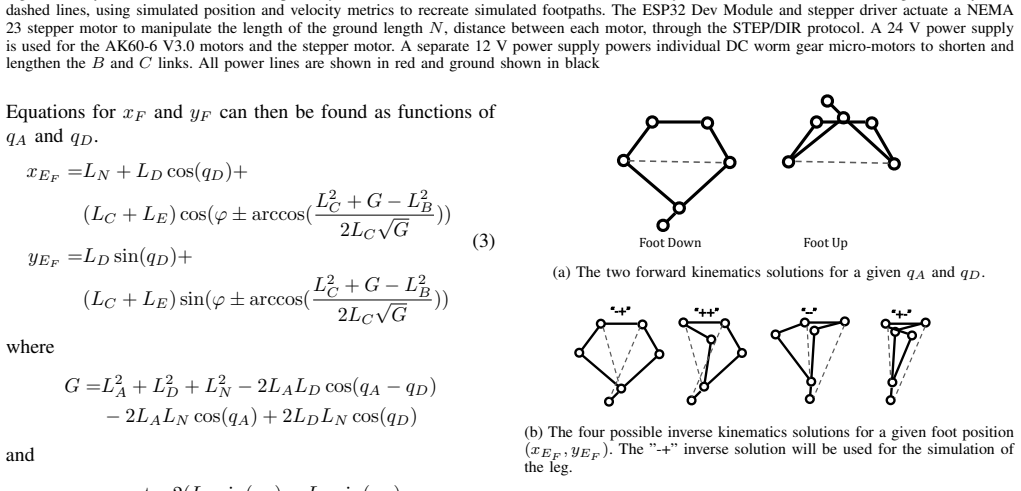
Finding Workspace:The total area reachable by the foot is defined by the positions whereq A =q B orq A = qB +πandq D =q C orq D =q C +π[19]. These workspace boundaries are singularities of the linkage. The full workspace may include points where the ’elbows’B o andC o are below the position of the foot,E F , when the ground is taken to be parallel to the ...
-
[3]
Finding Static F orces:The theoretical static pushing forces were found using the Jacobian of the 5-bar system, defined by FEF ,x FEF ,y = (J(q) T ) −1 τA τD ,(12) following the relationshipτ=J(q) T F[25], and maximizing the forces achievable at the foot with the magnitude motor torque limited to 1 Nm, so that the forces simulated are newtons per Nm of to...
-
[4]
search,” favoring large workspace and obstacle clearance, and “rescue,
Condition Number:The condition numberκis the ratio of the largest singular value to the smallest singular value of a matrix. The condition number can be used to determine the error amplification between the input and output and to determine when the linkage is close to a singularity [26]. The condition number of the Jacobian is shown in Equation 13. κ(J(q...
-
[5]
For the tests an ASANI Mini Crane Scale was used to measure the force the foot could pull the platform back with when the motor bus current was limited to 1 Amp. The peak force generated under static conditions for the baseline, retractedBandClinks, and elongatedN, was tested. The test was repeated 5 times. The results of these tests are shown in Figure 1...
-
[6]
Bipedal System:A proof-of-concept bipedal platform suspended on a boom arm, shown in Figure 12 was as- sembled to assess the real-world viability of a dynamically extensible and retractable leg linkage. The system utilized a linear stage with a stepper motor to change the length of the ground link between the motors and capstan drives to change the length...
-
[7]
The current state and future outlook of rescue robotics,
J. Delmerico, S. Mintchev, A. Giusti, B. Gromov, K. Melo, T. Horvat, C. Cadena, M. Hutter, A. Ijspeert, D. Floreano,et al., “The current state and future outlook of rescue robotics,”Journal of Field Robotics, vol. 36, no. 7, pp. 1171–1191, 2019
work page 2019
-
[8]
Design requirements for robots in search and rescue operations,
J. Mukhopadhyay, “Design requirements for robots in search and rescue operations,”
-
[9]
Robotics in disaster response: Enhancing search and rescue operations,
H. Mugo Moses, “Robotics in disaster response: Enhancing search and rescue operations,”
-
[10]
A review of mobile robots: Concepts, methods, theoretical framework, and applications,
F. Rubio, F. Valero, and C. Llopis-Albert, “A review of mobile robots: Concepts, methods, theoretical framework, and applications,” International Journal of Advanced Robotic Systems, vol. 16, no. 2, p. 1729881419839596, 2019
work page 2019
-
[11]
Resqbot: A mobile rescue robot with immersive teleperception for casualty extraction,
R. P. Saputra and P. Kormushev, “Resqbot: A mobile rescue robot with immersive teleperception for casualty extraction,” inAnnual Confer- ence Towards Autonomous Robotic Systems, pp. 209–220, Springer, 2018
work page 2018
-
[12]
Real-world embodied ai through a morphologically adaptive quadruped robot,
T. F. Nygaard, C. P. Martin, J. Torresen, K. Glette, and D. Howard, “Real-world embodied ai through a morphologically adaptive quadruped robot,”Nature Machine Intelligence, vol. 3, no. 5, pp. 410– 419, 2021
work page 2021
-
[13]
J. Hur, H. Song, and S. Jeong, “Continuously variable transmission and stiffness actuator based on actively variable four-bar linkage for highly dynamic robot systems,”IEEE Robotics and Automation Letters, vol. 9, no. 8, pp. 7118–7125, 2024
work page 2024
-
[14]
Analysis of a new single degree-of-freedom eight link leg mechanism for walking machine,
S. G. Desai, A. R. Annigeri, and A. TimmanaGouda, “Analysis of a new single degree-of-freedom eight link leg mechanism for walking machine,”Mechanism and machine theory, vol. 140, pp. 747–764, 2019
work page 2019
-
[15]
Development of a load-bearing, terrain-adaptive hexapod robot with chebyshev-linkage legs,
Z. Ju, R. Wu, D. Guo, and Y . Xu, “Development of a load-bearing, terrain-adaptive hexapod robot with chebyshev-linkage legs,”Journal of Field Robotics, vol. 42, no. 4, pp. 1439–1462, 2025
work page 2025
-
[16]
A comprehensive review of hexapod robots: Advancements, challenges, and applications,
D. Shah, S. Menpara, S. Soni, D. Gandhi, J. Dave, and B. Modi, “A comprehensive review of hexapod robots: Advancements, challenges, and applications,”Nirma University Journal of Engineering and Tech- nology, vol. 2, no. 2, pp. 12–19, 2024
work page 2024
-
[17]
A historical perspective of legged robots,
M. F. Silva and J. Tenreiro Machado, “A historical perspective of legged robots,”Journal of Vibration and Control, vol. 13, no. 9-10, pp. 1447–1486, 2007
work page 2007
-
[18]
Design, analysis and experiments of hexapod robot with six-link legs for high dynamic locomotion,
J. Ma, G. Qiu, W. Guo, P. Li, and G. Ma, “Design, analysis and experiments of hexapod robot with six-link legs for high dynamic locomotion,”Micromachines, vol. 13, no. 9, p. 1404, 2022
work page 2022
-
[19]
Optimal design of a five-bar leg mechanism for a quadruped robot,
C. Bai, G. Chen, J. Ran, and Y . Lou, “Optimal design of a five-bar leg mechanism for a quadruped robot,” inChinese Intelligent Systems Conference, pp. 171–179, Springer, 2020
work page 2020
-
[20]
Optimized design of 5r planar parallel mechanism aimed at gait-cycle of quadruped robots,
M. D Ratolikar and P. Kumar R, “Optimized design of 5r planar parallel mechanism aimed at gait-cycle of quadruped robots,”Journal of Vibroengineering, vol. 24, no. 1, pp. 104–115, 2022
work page 2022
-
[21]
D. Kavala Sen, A. Yildiz, and O. Kopmaz, “Optimal design of a five- bar planar manipulator and its controller by using different algorithms for minimum shaking forces and moments for the largest trajectory in a usable workspace,”Machines, vol. 10, no. 11, p. 971, 2022
work page 2022
-
[22]
R. Sreenivasulu, G. Chaitanya, G. Kumar, and M. Devi, “Inverse kinematic solution for five bar parallel linkage planar manipulator using python and optimization by taguchi method,”International Journal of Engineering Trends and Technology, vol. 69, no. 5, pp. 94– 100, 2021
work page 2021
-
[23]
Optimal design and implementation of an amphibious bionic legged robot,
G. Wang, K. Liu, X. Ma, X. Chen, S. Hu, Q. Tang, Z. Liu, M. Ding, and S. Han, “Optimal design and implementation of an amphibious bionic legged robot,”Ocean Engineering, vol. 272, p. 113823, 2023
work page 2023
-
[24]
Overconstrained coaxial design of robotic legs with omni-directional locomotion,
Y . Gu, S. Feng, Y . Guo, F. Wan, J. S. Dai, J. Pan, and C. Song, “Overconstrained coaxial design of robotic legs with omni-directional locomotion,”Mechanism and Machine Theory, vol. 176, p. 105018, 2022
work page 2022
-
[25]
A study of the workspace of five-bar closed loop manipulator,
B. Fallahi, H. Lai, R. Naghibi, and Y . Wang, “A study of the workspace of five-bar closed loop manipulator,”Mechanism and Machine Theory, vol. 29, no. 5, pp. 759–765, 1994
work page 1994
-
[26]
Study and development of parallel robots based on 5-bar linkage,
M. T. Hoang, T. T. Vuong, and C. B. Pham, “Study and development of parallel robots based on 5-bar linkage,” inNational Conference on Machines and Mechanisms, Ho Chi Minh City, pp. 1–14, 2015
work page 2015
-
[27]
Optimal synthesis of five-bar link- age based on singularity-free workspaces with predefined shapes,
L. Erwin-Christian, C. Valentin, D. Tivadar, O. Alexandru, T. Elida- Gabriela, and S. Melania-Olivia, “Optimal synthesis of five-bar link- age based on singularity-free workspaces with predefined shapes,” Robotics, vol. 13, no. 12, p. 173, 2024
work page 2024
-
[28]
B. P. Parmar,Conceptualization and design of a Walking Robot. PhD thesis, Indian Institute of Space Science and Technology, 2017
work page 2017
-
[29]
Design principles for a family of direct-drive legged robots,
G. Kenneally, A. De, and D. E. Koditschek, “Design principles for a family of direct-drive legged robots,”IEEE Robotics and Automation Letters, vol. 1, no. 2, pp. 900–907, 2016
work page 2016
-
[30]
Dyno-kinematic leg design for high energy robotic locomotion,
M. Austin, J. Brown, J. Nicholson, and J. Clark, “Dyno-kinematic leg design for high energy robotic locomotion,”Journal of Mechanisms and Robotics, vol. 15, no. 3, p. 031001, 2023
work page 2023
-
[31]
A systematic method of hybrid position/force control of a manipulator,
J. J. Craig and M. H. Raibert, “A systematic method of hybrid position/force control of a manipulator,” inCOMPSAC 79. Proceed- ings. Computer Software and The IEEE Computer Society’s Third International Applications Conference, 1979., pp. 446–451, IEEE, 1979
work page 1979
-
[32]
Jacobian, manipulability, condition number, and accu- racy of parallel robots,
J.-P. Merlet, “Jacobian, manipulability, condition number, and accu- racy of parallel robots,” 2006
work page 2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.