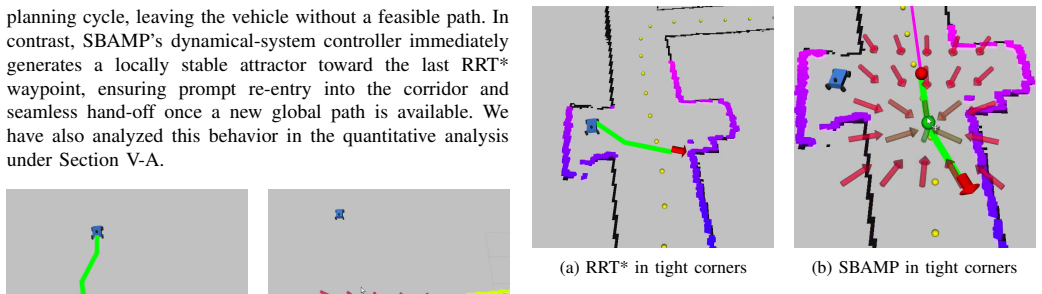
SBAMP: Sampling Based Adaptive Motion Planning
Pith reviewed 2026-05-17 22:08 UTC · model grok-4.3
The pith
SBAMP combines RRT* global paths with an online controller to adapt to disturbances in real time without any pre-trained data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SBAMP is a hybrid motion planning framework that pairs RRT*-based global planning with an online Lyapunov-stable SEDS-inspired controller realized through lightweight constrained optimization. This combination enables stable real-time adaptation to perturbations while preserving the global path structure and requires no pre-trained data.
What carries the argument
The SBAMP hybrid framework that merges RRT* global planning with an online Lyapunov-stable SEDS-inspired controller integrated via lightweight constrained optimization in the control loop.
If this is right
- Robots recover from disturbances while following near-optimal paths.
- Consistent performance holds under dynamic conditions without offline preparation.
- Reliable obstacle handling occurs in both simulation and physical hardware.
- Real-time adaptation preserves global path structure during operation.
Where Pith is reading between the lines
- The same online optimization pattern could extend to other global planners such as PRM variants.
- Hardware results on a mobile robot platform suggest the method may transfer to similar wheeled systems facing unpredictable conditions.
- Reducing the need for pre-training could open the approach to tasks where collecting demonstration data is costly or unsafe.
Load-bearing premise
An online Lyapunov-stable SEDS-inspired controller can be realized with lightweight constrained optimization and will maintain stability and global path fidelity under real perturbations without offline data.
What would settle it
Run hardware trials on the RoboRacer where the robot receives repeated disturbances and check whether it loses stability or strays far from the RRT* path without any retraining or data.
Figures











read the original abstract
Autonomous robots operating in dynamic environments must balance global path optimality with real-time responsiveness to disturbances. This requires addressing a fundamental trade-off between computationally expensive global planning and fast local adaptation. Sampling-based planners such as RRT* produce near-optimal paths but struggle under perturbations, while dynamical systems approaches like SEDS enable smooth reactive behavior but rely on offline data-driven optimization. We introduce Sampling-Based Adaptive Motion Planning (SBAMP), a hybrid framework that combines RRT*-based global planning with an online, Lyapunov-stable SEDS-inspired controller that requires no pre-trained data. By integrating lightweight constrained optimization into the control loop, SBAMP enables stable, real-time adaptation while preserving global path structure. Experiments in simulation and on RoboRacer hardware demonstrate robust recovery from disturbances, reliable obstacle handling, and consistent performance under dynamic conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes SBAMP, a hybrid motion planning framework that couples RRT*-generated global paths with an online, data-free SEDS-inspired dynamical system controller. The controller is realized by embedding a lightweight constrained optimization problem inside the control loop to enforce Lyapunov stability while allowing reactive adaptation to disturbances; the global path structure is preserved as a reference. Experiments in simulation and on RoboRacer hardware are reported to show robust recovery, obstacle avoidance, and real-time performance under dynamic conditions.
Significance. If the central claim holds, the work would be significant for mobile robotics because it removes the offline demonstration or learning step that standard SEDS requires while still promising formal stability guarantees and global path fidelity. This could simplify deployment in unstructured environments where collecting training data is impractical. The approach directly targets the global-vs-local trade-off that sampling-based planners and pure reactive controllers each handle only partially.
major comments (2)
- [§3] §3 (Controller Formulation): The manuscript states that Lyapunov stability is enforced by solving a constrained optimization problem online using only the RRT* path as reference and no pre-trained data. However, the standard SEDS derivation obtains stability by solving linear matrix inequalities on learned parameters; it is not shown how the online problem is instantiated to guarantee that the Lyapunov function decreases along trajectories under arbitrary perturbations without reducing to a local approximation or requiring additional assumptions on the reference path.
- [§4.2] §4.2 (Stability Analysis): The claim of 'Lyapunov-stable' behavior under real-time adaptation is load-bearing for the central contribution. No explicit derivation or proof sketch is provided demonstrating that the constrained optimization preserves the global decrease condition of the quadratic Lyapunov function when the reference is a piecewise-linear RRT* path rather than a learned attractor; this leaves open whether perturbations can violate stability while still appearing to track the path locally.
minor comments (2)
- [Abstract] The abstract and introduction use 'lightweight constrained optimization' without specifying the solver, constraint count, or typical solve time; adding these quantitative details would strengthen the real-time performance claim.
- [§5] Figure captions and experimental setup descriptions should explicitly state the disturbance magnitudes, obstacle densities, and success criteria used to quantify 'robust recovery' so that results can be compared with prior hybrid planners.
Simulated Author's Rebuttal
We thank the referee for their thorough review and valuable comments on the stability guarantees in SBAMP. We address each major comment below, providing clarifications and indicating where revisions will be made to strengthen the manuscript.
read point-by-point responses
-
Referee: [§3] §3 (Controller Formulation): The manuscript states that Lyapunov stability is enforced by solving a constrained optimization problem online using only the RRT* path as reference and no pre-trained data. However, the standard SEDS derivation obtains stability by solving linear matrix inequalities on learned parameters; it is not shown how the online problem is instantiated to guarantee that the Lyapunov function decreases along trajectories under arbitrary perturbations without reducing to a local approximation or requiring additional assumptions on the reference path.
Authors: We appreciate the referee's observation regarding the distinction from standard SEDS. In our formulation, the online constrained optimization is designed to select the parameters of the SEDS-inspired vector field at each control cycle such that the quadratic Lyapunov function V(x) = (x - x_ref)^T P (x - x_ref) satisfies dot{V} < 0 along the trajectory, where x_ref is the closest point on the current RRT* segment. This is enforced by casting the stability condition as a linear constraint in the quadratic program, derived from the system dynamics and the reference velocity. While this ensures local stability around the reference path, we agree that a more detailed explanation of how this avoids reducing to a purely local approximation is needed. We will add a subsection in §3 detailing the derivation of the stability constraint and any assumptions on the reference path segments. revision: yes
-
Referee: [§4.2] §4.2 (Stability Analysis): The claim of 'Lyapunov-stable' behavior under real-time adaptation is load-bearing for the central contribution. No explicit derivation or proof sketch is provided demonstrating that the constrained optimization preserves the global decrease condition of the quadratic Lyapunov function when the reference is a piecewise-linear RRT* path rather than a learned attractor; this leaves open whether perturbations can violate stability while still appearing to track the path locally.
Authors: Thank you for pointing this out. The stability analysis in §4.2 relies on the fact that the optimization ensures the decrease condition at each instant, and since the RRT* path is followed segment by segment with continuous transitions, the overall behavior maintains stability. However, we acknowledge that an explicit proof sketch connecting the local QP solutions to global decrease along the entire path would be beneficial. In the revised version, we will include a proof sketch in §4.2 showing that under the assumption of sufficient path smoothness and bounded perturbations, the Lyapunov function decreases globally. If the referee has specific concerns about potential violations, we would welcome further discussion. revision: yes
Circularity Check
No significant circularity detected in derivation chain
full rationale
The provided abstract and manuscript summary describe SBAMP as a hybrid method integrating RRT*-based global planning with an online Lyapunov-stable SEDS-inspired controller realized via lightweight constrained optimization, without pre-trained data. No equations, derivations, or load-bearing steps are visible that reduce by construction to fitted parameters, self-definitions, or self-citation chains. The central claim is presented as a novel integration whose stability and adaptation properties are asserted to follow from the proposed online optimization, rather than being presupposed by the inputs or prior self-referential results. The approach is self-contained as a proposed framework whose validity rests on empirical demonstration rather than definitional equivalence.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
each Ak+Ak^T ≺0 (ensuring V(ξ)=ξ^Tξ decays) and bk=-Ak xi ⇒f(xi)=0
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
SEDS generator refits the dynamical system to the latest RRT* segment
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Sampling-based Algorithms for Optimal Motion Planning
S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion planning,”International Journal of Robotics Research, vol. 30, no. 7, pp. 846–894, June 2011. [Online]. Available: https://arxiv.org/pdf/1105.1186
work page internal anchor Pith review Pith/arXiv arXiv 2011
-
[2]
Learning stable nonlinear dynamical systems with gaussian mixture models,
S. M. Khansari-Zadeh and A. Billard, “Learning stable nonlinear dynamical systems with gaussian mixture models,”IEEE Transactions on Robotics, vol. 27, no. 5, pp. 943–957, Oct 2011. [Online]. Available: https://ieeexplore.ieee.org/document/5953529
-
[3]
A physically-consistent bayesian non-parametric mixture model for dynamical system learning,
N. Figueroa and A. Billard, “A physically-consistent bayesian non-parametric mixture model for dynamical system learning,” in Proceedings of The 2nd Conference on Robot Learning, ser. Proceedings of Machine Learning Research, vol. 87. PMLR, Oct 2018, pp. 927–946. [Online]. Available: https://proceedings.mlr.press/ v87/figueroa18a/figueroa18a.pdf
work page 2018
-
[4]
F1tenth: An open-source evaluation environment for continuous control and rein- forcement learning,
M. O’Kelly, H. Zheng, D. Karthik, and R. Mangharam, “F1tenth: An open-source evaluation environment for continuous control and rein- forcement learning,” inNeurIPS 2019 Competition and Demonstration Track. PMLR, 2020, pp. 77–89
work page 2019
-
[5]
S. M. LaValle,Planning Algorithms. Cambridge University Press,
- [6]
-
[7]
Anytime motion planning using the rrt*,
S. Karaman, M. Walter, A. Perez, E. Frazzoli, and S. Teller, “Anytime motion planning using the rrt*,” inIEEE International Conference on Robotics and Automation (ICRA), 2011, pp. 1478–1483
work page 2011
-
[8]
Sampling-based motion planning: A comparative review,
A. Ortheyet al., “Sampling-based motion planning: A comparative review,”Annual Review of Control, Robotics, and Autonomous Systems, 2024
work page 2024
-
[9]
Sampling heuristics for optimal motion planning in high dimensions,
B. Akgun and M. Stilman, “Sampling heuristics for optimal motion planning in high dimensions,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2011, pp. 2640–2645
work page 2011
-
[10]
Incremental motion learning with locally modulated dynamical systems,
K. Kronander, S. M. Khansari-Zadeh, and A. Billard, “Incremental motion learning with locally modulated dynamical systems,”Robotics and Autonomous Systems, vol. 70, pp. 52–62, 2015
work page 2015
-
[11]
Robust- RRT: Probabilistically-complete motion planning for uncertain nonlinear systems,
A. Wu, T. Lew, K. Solovey, E. Schmerling, and M. Pavone, “Robust- RRT: Probabilistically-complete motion planning for uncertain nonlinear systems,”arXiv preprint arXiv:2205.07728, 2022
-
[12]
Ro- bust tube-based lpv-mpc for autonomous lane keeping,
M. Nezami, H. S. Abbas, N. T. Nguyen, and G. Schildbach, “Ro- bust tube-based lpv-mpc for autonomous lane keeping,”arXiv preprint arXiv:2210.02971, 2022
-
[13]
D. S. Karachalios and H. S. Abbas, “Efficient nonlinear mpc by leveraging lpv embedding and sequential quadratic programming,”arXiv preprint arXiv:2403.19195, 2025
-
[14]
Stability of switched systems with average dwell-time,
J. P. Hespanha and A. S. Morse, “Stability of switched systems with average dwell-time,” inProceedings of the 38th IEEE Conference on Decision and Control, vol. 2. Phoenix, AZ: IEEE, 1999, pp. 2655–2660. [Online]. Available: https://ieeexplore.ieee.org/stamp/stamp. jsp?tp=&arnumber=831330
work page 1999
-
[15]
CVXPY: A Python-embedded modeling lan- guage for convex optimization,
S. Diamond and S. Boyd, “CVXPY: A Python-embedded modeling lan- guage for convex optimization,”Journal of Machine Learning Research, vol. 17, no. 83, pp. 1–5, 2016
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.