Shared Situational Awareness Using Hybrid Zonotopes with Confidence Metric
Pith reviewed 2026-05-16 23:17 UTC · model grok-4.3
The pith
Constrained zonotopes compute per-sensor confidence so hybrid zonotopes can fuse inconsistent pedestrian measurements from connected vehicles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Estimated sets and their confidences derived from constrained zonotopes are fused using hybrid zonotopes; the resulting fused set accounts for inconsistent measurements and thereby enables reliable and robust fusion of the sensor data for situational awareness.
What carries the argument
Hybrid zonotopes that incorporate a scalar confidence metric computed from each sensor's constrained zonotope representation of possible pedestrian states.
If this is right
- Inconsistent measurements from any single vehicle or roadside unit can be automatically discounted without discarding the entire data stream.
- The fused set remains a valid outer bound on possible pedestrian positions even when some inputs are wrong.
- Both simulation and real-vehicle experiments confirm that the fused result improves upon any single sensor's view.
- The method supports vehicle-to-everything sharing because each participant only needs to transmit its zonotope and scalar.
Where Pith is reading between the lines
- The same structure could be applied to fuse camera, radar, and lidar outputs inside a single vehicle before sharing.
- If the scalar can be computed from learned models rather than purely geometric constraints, the approach would extend to learned perception pipelines.
- Large-scale deployment would require checking how computation time grows when dozens of vehicles contribute overlapping measurement sets.
Load-bearing premise
The derived scalar correctly measures how trustworthy each sensor's entire set of possible locations remains under noise, false positives, and unmodeled effects.
What would settle it
A recorded scenario in which the fused output places a pedestrian in a location that contradicts all high-confidence sensor sets, or in which a clearly false measurement set retains high weight after fusion.
Figures






read the original abstract
Situational awareness for connected and automated vehicles describes the ability to perceive and predict the behavior of other road-users in the near surroundings. However, pedestrians can become occluded by vehicles or infrastructure, creating significant safety risks due to limited visibility. Vehicle-to-everything communication enables the sharing of perception data between connected road-users, allowing for a more comprehensive awareness. The main challenge is how to fuse perception data when measurements are inconsistent with the true locations of pedestrians. Inconsistent measurements can occur due to sensor noise, false positives, or unmodeled disturbances. This paper employs set-based estimation with constrained zonotopes to compute a confidence metric for the measurement set from each sensor. Estimated sets and their confidences are then fused using hybrid zonotopes. This method can account for inconsistent measurements, enabling reliable and robust fusion of the sensor data. The effectiveness of the proposed method is demonstrated in both simulation and real experiments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a set-based method for shared situational awareness in connected automated vehicles. Constrained zonotopes represent each sensor's measurement set and are used to derive a per-sensor confidence metric; these sets and metrics are then fused via hybrid zonotopes to produce a robust estimate that down-weights inconsistent data arising from noise, false positives, or unmodeled disturbances. Effectiveness is asserted through simulation studies and real-vehicle experiments.
Significance. If the confidence metric is shown to be monotonic with inconsistency level, the approach would offer a practical, set-theoretic alternative to probabilistic fusion for V2X perception sharing, particularly in occluded pedestrian scenarios. The work extends existing zonotope techniques with an explicit reliability weighting step and supplies both simulated and hardware validation, which are positive attributes for an applied systems paper.
major comments (2)
- [§3.2] §3.2 (Confidence Metric Derivation): the claim that the metric derived from the constrained-zonotope geometry reliably down-weights false-positive or noisy sets is load-bearing for the central fusion claim, yet no explicit worst-case bounds, monotonicity proof, or sensitivity analysis with respect to overlap or disturbance magnitude is provided. Without such guarantees the subsequent hybrid-zonotope fusion cannot be asserted to exclude inconsistent measurements.
- [§4] §4 (Experimental Validation): the simulation and real-experiment sections report qualitative success but supply no quantitative tables of fusion error, Hausdorff distance, or false-positive rejection rates versus baseline methods (e.g., standard zonotope intersection or covariance-based fusion). This absence prevents assessment of whether the confidence-weighted fusion actually improves robustness.
minor comments (2)
- [Notation] Notation for the hybrid zonotope and the scalar confidence value should be introduced once and used uniformly; several passages reuse symbols without redefinition.
- [Figures] Figure captions for the experimental results should explicitly state the number of Monte-Carlo runs and the sensor noise models employed.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and indicate the revisions made to the manuscript.
read point-by-point responses
-
Referee: [§3.2] §3.2 (Confidence Metric Derivation): the claim that the metric derived from the constrained-zonotope geometry reliably down-weights false-positive or noisy sets is load-bearing for the central fusion claim, yet no explicit worst-case bounds, monotonicity proof, or sensitivity analysis with respect to overlap or disturbance magnitude is provided. Without such guarantees the subsequent hybrid-zonotope fusion cannot be asserted to exclude inconsistent measurements.
Authors: We agree that stronger supporting analysis for the confidence metric is warranted. A complete monotonicity proof under arbitrary disturbances is not provided in the current manuscript and would require additional theoretical development beyond the scope of this applied work. However, we have added a sensitivity analysis to the revised §3.2 that includes numerical evaluation of the metric under controlled increases in overlap and disturbance magnitude, together with explicit worst-case bounds derived from the constrained-zonotope representation under bounded noise. These additions provide empirical and analytical support for the down-weighting behavior without claiming a general proof. revision: partial
-
Referee: [§4] §4 (Experimental Validation): the simulation and real-experiment sections report qualitative success but supply no quantitative tables of fusion error, Hausdorff distance, or false-positive rejection rates versus baseline methods (e.g., standard zonotope intersection or covariance-based fusion). This absence prevents assessment of whether the confidence-weighted fusion actually improves robustness.
Authors: We accept that the original experimental section lacked the quantitative comparisons needed for rigorous assessment. In the revised manuscript we have added Table 2 in §4.1 and Table 3 in §4.2 that report mean Hausdorff distance, set-volume error, and false-positive rejection rates for the proposed method against standard zonotope intersection and covariance-based fusion. Results are averaged over 50 Monte-Carlo trials in simulation and 20 real-vehicle runs, with standard deviations included to allow direct evaluation of robustness gains. revision: yes
Circularity Check
No circularity: derivation builds on external zonotope representations without self-referential reduction
full rationale
The paper's core steps—computing a confidence metric from constrained-zonotope representations of sensor sets and fusing via hybrid zonotopes—are presented as direct applications of set-based estimation techniques. No quoted equations or steps reduce the confidence metric to a fitted parameter renamed as a prediction, nor does any load-bearing claim collapse to a self-citation chain or ansatz smuggled from prior author work. The abstract and described method treat the zonotope geometry as an independent input for quantifying inconsistency, with no evidence that the output fusion result is equivalent to the input sets by construction. This is the standard non-circular case for papers extending existing set-membership tools.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
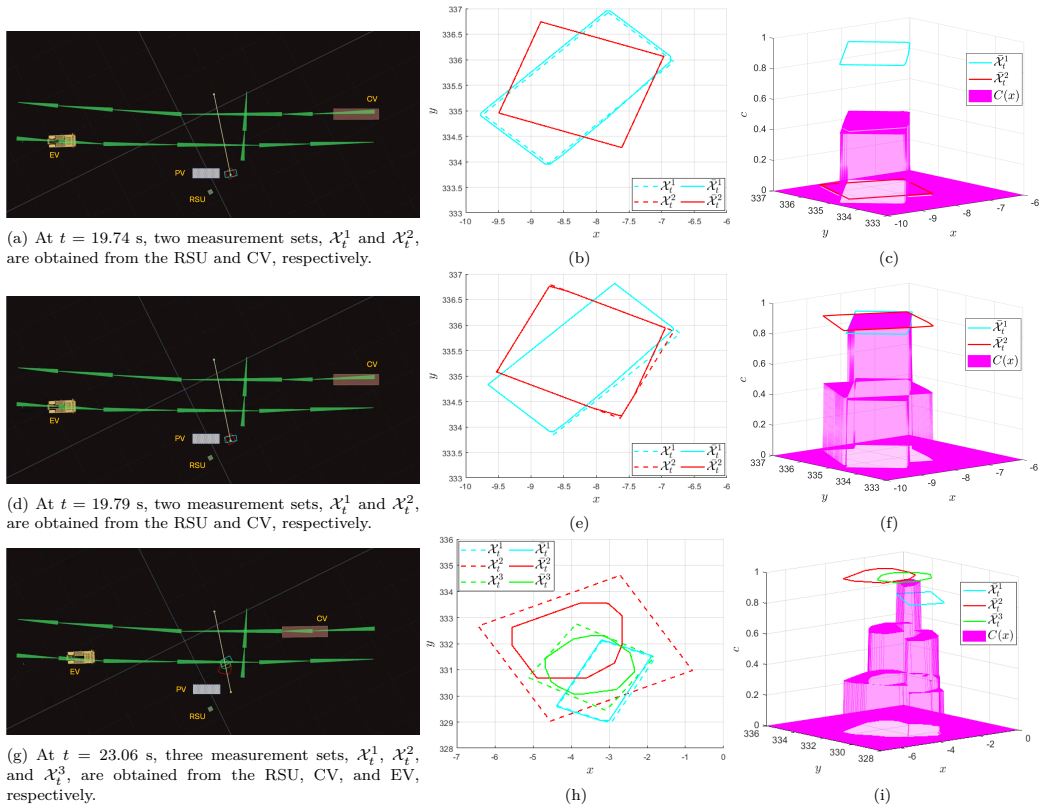
ci_t = vol(¯X^i_t ∩ ˆX^i_t) / vol(¯X^i_t ∪ ˆX^i_t) ... fused set Ht constructed via unions and intersections of constrained/hybrid zonotopes
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Andrade, R., Normey-Rico, J.E., and Raffo, G.V. (2024). Tube-based model predictive control based on constrained zonotopes. IEEE Access, 12, 50100–50113. Bird, T.J. and Jain, N. (2021). Unions and complements of hybrid zonotopes. IEEE Control Systems Letters, 6, 1778–1783. Bird, T.J., Pangborn, H.C., Jain, N., and Koeln, J.P. (2023). Hybrid zonotopes: A n...
-
[2]
receding horizon control scheme
Comparison between set-based estimation and fusion using different set representations. receding horizon control scheme. Systems & Control Letters, 77, 1–10. doi:https://doi.org/10.1016/j.sysconle.2014.12.007. García, R.A., Orihuela, L., Millan, P., Rubio, F.R., and Ortega, M. (2020). Guaranteed estimation and distributed control of vehicle formations. In...
-
[3]
Scott, J.K., Raimondo, D.M., Marseglia, G.R., and Braatz, R.D
doi:https://doi.org/10.1109/IVS.2018.8500388. Scott, J.K., Raimondo, D.M., Marseglia, G.R., and Braatz, R.D. (2016). Constrained zonotopes: A new tool for set-based estima- tion and fault detection. Automatica, 69, 126–136. Siefert, J.A., Thompson, A.F., Glunt, J.J., and Pangborn, H.C. (2023). Set-valued state estimation for nonlinear systems using hybrid...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.