A Soft Robotic Demonstration in the Stratosphere
Pith reviewed 2026-05-15 16:50 UTC · model grok-4.3
The pith
New UV-crosslinked silicone dielectric elastomer actuators function reliably at 23.6 km altitude in the stratosphere.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
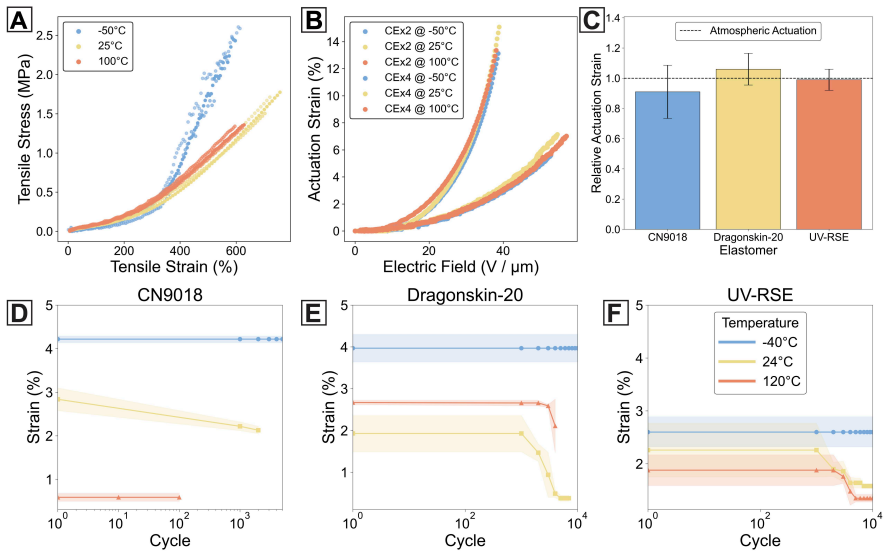
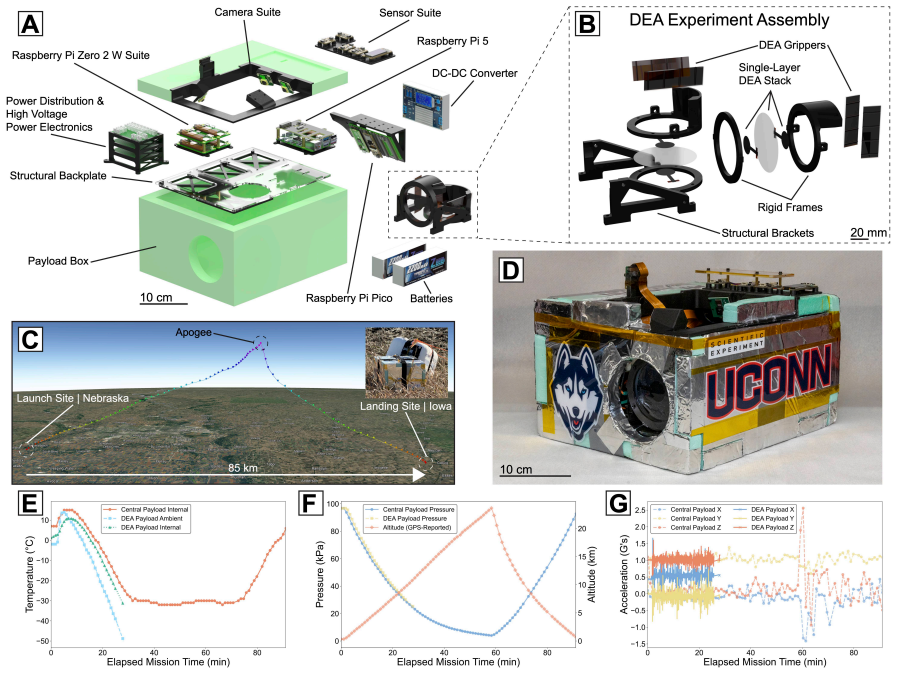
The central claim is that a crosslinking mechanism for silicone elastomers under ultraviolet light, using trimethyl(methylcyclopentadienyl)platinum(IV) as a catalyst to react hydrosilane to vinyl groups and form carbon-carbon bonds, produces dielectric elastomer actuators with exceptional electro-mechanical performance and material resilience. This enables fully autonomous systems with grippers that operate in stratospheric conditions. Two balloon missions carried out at elevations as high as 23.6 km, pressures below 0.05 atm, and temperatures of -55°C confirm the actuators function as a viable soft robotic technology under space-like extremes.
What carries the argument
UV-catalyzed crosslinking of silicone elastomers via carbon-carbon bond formation using a platinum catalyst, which produces resilient dielectric elastomer actuators that convert electrical energy into mechanical work across wide temperature and pressure ranges.
If this is right
- The material maintains electro-mechanical performance across wider temperature and pressure extremes than acrylic or standard silicone elastomers.
- Fully autonomous soft robotic grippers can be deployed in stratospheric and space-like environments.
- The chemical building blocks and catalyst can be expanded to address adhesion and additive manufacturing challenges in silicones.
- Soft robots become practical for missions where environmental parameters change unexpectedly.
Where Pith is reading between the lines
- The same material approach could support soft robots on actual orbital or planetary missions beyond balloon tests.
- Combining the UV processing with 3D printing might allow in-situ fabrication of actuators in remote or harsh locations.
- Further exposure to cosmic radiation during longer flights could reveal limits not captured in the current lab vacuum tests.
Load-bearing premise
Laboratory tests at extreme temperatures and vacuum accurately predict actuator performance during actual balloon ascent, descent, and radiation exposure without new failure modes.
What would settle it
A third balloon flight or ground simulation showing actuator stroke or force dropping more than 20 percent during ascent compared to pre-flight lab tests at -40°C and near-vacuum.
Figures


read the original abstract
Machines designed for operation in Space, as well as other extreme environments, need to be both resilient and adaptable when mission parameters change. Soft robots offer advantages in adaptability, but most lack resilience to the pressure and temperature extremes found as close as the Stratosphere. Dielectric elastomer actuators overcome some of those limitations when built as solid state compliant capacitors capable of converting electrical energy into mechanical work, but the elastomer resilience limits the device's operating window. Here we present a crosslinking mechanism for silicone elastomers under ultraviolet light using trimethyl(methylcyclopentadienyl)platinum(IV) as a catalyst to react hydrosilane to vinyl groups. The formation of carbon-carbon bonds enables fast processing under UV light and exceptional electro-mechanical performance in dielectric elastomer actuators. The material resilience advantage is demonstrated in controlled experiments at -40{\deg} and 120{\deg} C, as well as near vacuum, in comparison with state-of-the-art acrylic and silicone chemistries. Fully autonomous systems controlling grippers made with the novel silicone were integrated into payloads for high altitude balloon testing. Two stratospheric balloon missions were carried out and demonstrated DEAs as a viable soft robotic technology under space-like conditions (as high as 23.6 km elevation, at <0.05 atm and -55{\deg} C). The combinations of chemical building blocks and catalyst can be further expanded to address other challenges for silicones, including adhesion and additive manufacturing.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a UV-light crosslinking mechanism for silicone elastomers using trimethyl(methylcyclopentadienyl)platinum(IV) as catalyst to form carbon-carbon bonds from hydrosilane and vinyl groups. This yields DEAs with improved electro-mechanical performance and resilience, shown in controlled lab tests at -40°C, 120°C, and near-vacuum versus acrylic and standard silicone materials. Autonomous gripper systems using the new material were integrated into payloads and flown on two stratospheric balloon missions reaching 23.6 km altitude (<0.05 atm, -55°C), with the authors claiming this demonstrates DEAs as viable soft robotic technology under space-like conditions. The work also notes potential for expanding the chemistry to adhesion and additive manufacturing.
Significance. If the central demonstration holds, the material advance could enable more reliable soft actuators for stratospheric and space applications where temperature and pressure extremes limit current elastomers, providing a concrete path from lab resilience tests to field deployment.
major comments (1)
- [Abstract] Abstract and (presumed) Results section: The manuscript states that two balloon missions 'demonstrated DEAs as a viable soft robotic technology' at 23.6 km, <0.05 atm and -55°C, yet reports no quantitative in-flight data (actuation logs, telemetry, success rates, or post-flight functional checks). This leaves the central viability claim unsupported by direct evidence from the dynamic flight profile, relying instead on static lab tests at fixed conditions.
minor comments (2)
- [Abstract] Abstract: temperature notation uses inconsistent formatting ('-40' vs. '-55' with LaTeX deg symbol); standardize to °C throughout.
- [Introduction] The comparison to 'state-of-the-art acrylic and silicone chemistries' would benefit from explicit citation of the specific prior materials and their performance metrics for direct side-by-side evaluation.
Simulated Author's Rebuttal
We thank the referee for their insightful comments on our manuscript. We provide a point-by-point response to the major comment below and have revised the manuscript accordingly where appropriate.
read point-by-point responses
-
Referee: [Abstract] Abstract and (presumed) Results section: The manuscript states that two balloon missions 'demonstrated DEAs as a viable soft robotic technology' at 23.6 km, <0.05 atm and -55°C, yet reports no quantitative in-flight data (actuation logs, telemetry, success rates, or post-flight functional checks). This leaves the central viability claim unsupported by direct evidence from the dynamic flight profile, relying instead on static lab tests at fixed conditions.
Authors: We agree with the referee that the abstract phrasing could be interpreted as claiming direct in-flight demonstration of actuation performance, which is not supported by quantitative data in the current manuscript. The balloon missions demonstrated the practical deployment of the DEA systems in the stratosphere, with the autonomous grippers integrated and the payloads successfully reaching 23.6 km. Post-flight analysis showed the systems remained operational. To address this, we will revise the abstract to read that the missions 'demonstrated the deployment of DEA-based soft robotic systems under space-like conditions', emphasizing that the performance resilience was shown in lab tests replicating the flight conditions. We will also add a section or clarification in the results on the flight outcomes, including any available success metrics from the missions. This revision will be made in the next version of the manuscript. revision: yes
Circularity Check
No circularity: experimental demonstration with independent test results
full rationale
The paper describes synthesis of a UV-crosslinked silicone elastomer, lab characterization at fixed temperature and vacuum points, and integration into two stratospheric balloon payloads. No equations, parameter fits, or derivations are present that could reduce any claimed result to its own inputs by construction. Claims rest on direct experimental outcomes (material performance data and flight hardware survival) rather than self-citation chains, uniqueness theorems, or renamed empirical patterns. The work is self-contained against external benchmarks of material testing and flight demonstration.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Silicone elastomers can be crosslinked via hydrosilane-vinyl reaction under UV with the given catalyst to form stable C-C bonds
Reference graph
Works this paper leans on
- [1]
-
[2]
Y . Ogawa, D. Ando, Y ., Sutou, and J/ Koike, 2016. A lightweight shape-memory magnesium alloy. Science, 353(6297), pp.368-370. doi: 10.1126/science.aaf6524
-
[3]
R.F. Shepherd, F. Ilievski, W. Choi, S.A. Morin, A.A. Stokes, A.D. Mazzeo, X. Chen, M. Wang, and G.M. Whitesides, 2011. Multigait soft robot. Proceedings of the national academy of sciences, 108(51), pp.20400-20403. doi: 10.1073/pnas.1116564108
-
[4]
Y . Shi, E. Askounis, R. Plamthottam, T. Libby, Z. Peng, K. Youssef, J. Pu, R. Pelrine, and Q. Pei, 2022. A processable, high-performance dielectric elastomer and multilayering process. Science, 377(6602), pp.228-232. doi: 10.1126/science.abn0099
-
[5]
Y . Kim, G.A. Parada, S. Liu, and X. Zhao, 2019. Ferromagnetic soft continuum robots. Science robotics, 4(33), p.eaax7329. doi: 10.1126/scirobotics.aax7329
-
[6]
F. Huang, M. Weng, Z. Feng, X. Li, W. Zhang, and . Chen. Transparent photoactuators based on localized-surface-plasmon-resonant semiconductor nanocrystals: A platform for camouflage soft robots. Nanoscale, 12(22):11878–11886, 2020. Doi: /10.1039/D0NR00812E
- [7]
-
[8]
Doi: 10.1089/soro.2016.0009
-
[9]
W. Bartlett, M.T. Tolley, J.T. Overvelde, J.C. Weaver, B. Mosadegh, K. Bertoldi, G.M. Whitesides, and R.J. Wood. A 3d printed, functionally graded soft robot powered by combustion. Science, 349 (6244):161–165, Jul 2015. Doi: 10.1126/science.aab0129
-
[10]
Michael T. Tolley, Robert F. Shepherd, Bobak Mosadegh, Kevin C. Galloway, Michael Wehner, Michael Karpelson, Robert J. Wood, and George M. Whitesides. A resilient, untethered soft robot. Soft Robotics, 1(3):213–223, Sep 2014
work page 2014
-
[11]
Soft robotic grippers for biological sampling on deep reefs,
K.C. Galloway, K.P. Becker, B.Phillips, J. Kirby, S. Licht, D. Tchernov, R.J. Wood, and D.F. Gruber. Soft robotic grippers for biological sampling on deep reefs. Soft Robotics, 3(1):23–33, Mar 2016. Doi: 10.1089/soro.2015.0019
-
[12]
G. Li, X. Chen, F. Zhou, Y . Liang, Y .Xiao, X. Cao, Z. Zhang, M.Zhang, B. Wu, S. Yin, and et al. Self powered soft robot in the mariana trench. Nature, 591(7848):66–71, Mar 2021. Doi: 10.1038/s41586-020-03153-z
-
[13]
R. Pelrine, R. Kornbluh, Q. Pei, and J. Joseph, 2000. High-speed electrically actuated elastomers with strain greater than 100%. Science, 287(5454), pp.836-839. doi: 10.1126/ science.287.5454.836
work page 2000
-
[14]
A. Poulin, S. Rosset, and H.R. Shea,. Printing low-voltage dielectric elastomer actuators. Applied Physics Letters, 107(24), (2015). Doi: 10.1063/1.4937735
-
[15]
M. Duduta, E. Hajiesmaili, H. Zhao, R.J. Wood, and D.R. Clarke. Realizing the potential of dielectric elastomer artificial muscles. Proceedings of the National Academy of Sciences, 116(7):2476–2481, Jan 2019. doi: 10.1073/pnas.1815053116
- [16]
-
[17]
Doi: 10.1002/aisy.202200071
-
[18]
M. Duduta, F. Berlinger, R. Nagpal, D.R. Clarke, R. J. Wood, and F. Z. Temel. Tunable multi-modal locomotion in soft dielectric elastomer robots. IEEE Robotics and Automation Letters, 5(3):3868–3875, 2020. Doi: 10.1109/LRA.2020.2983705
-
[19]
O.A. Araromi, I. Gavrilovich, J. Shintake, S. Rosset, M. Richard, V . Gass, and H.R. Shea, Rollable multisegment dielectric elastomer minimum energy structures for a deployable microsatellite gripper. IEEE/ASME Transactions on Mechatronics, 20(1), pp.438-446, 2014. Doi: 10.1109/TMECH.2014.2329367
-
[20]
A soft and bistable gripper with adjustable energy barrier for fast capture in space
Yuhang Liu, Kai Luo, Shuai Wang, Xiaodong Song, Zhijuan Zhang, Qiang Tian, and Haiyan Hu. A soft and bistable gripper with adjustable energy barrier for fast capture in space. Soft Robotics, 10(1):77–87, Feb 2023. Doi: 10.1089/soro.2021.0147
-
[21]
M. Duduta, R.J. Wood, and D.R. Clarke, Multilayer dielectric elastomers for fast, programmable actuation without prestretch. Adv. Mater, 28(36), pp.8058-8063 (2016). doi: 10.1002/adma.201601842
-
[22]
Zhao, H., Hussain, A.M., Duduta, M., V ogt, D.M., Wood, R.J. and Clarke, D.R.. Compact dielectric elastomer linear actuators. Advanced functional materials, 28(42), p.1804328. (2018), doi: 10.1002/adfm.201804328
-
[23]
E. Hajiesmaili and D.R. Clarke. Dielectric elastomer actuators. Journal of Applied Physics, 129(15), Apr 2021. Doi: 10.1063/5.0043959
-
[24]
S. Jiang, C. Tang, X.J. Liu, and H. Zhao. Long-Life-Cycle and Damage-Recovery Artificial Muscles via Controllable and Observable Self-Clearing Process. Advanced Engineering Materials, 24(4), p.2101017, 2022, doi: 10.1002/adem.202101017
-
[25]
Y . Chen, H. Zhao, J. Mao, P. Chirarattananon, E.F. Helbling, N.S.P. Hyun, D.R. Clarke, and R.J. Wood. Controlled flight of a microrobot powered by soft artificial muscles. Nature, 575(7782), pp.324-329, 2019. Doi: 10.1038/s41586-019-1737-7
-
[26]
X. Shi, J. Zou, P. Yan, W. Wan, B. Lu, G. Gu, and X. Zhu. Semiseparated biphasic bicontinuous dielectric elastomer for high-performance artificial muscle. Science, 390(6777), pp.1044-1049, 2025. Doi:10.1126/science.adr3521
-
[27]
A. Bele, M. Dascalu, C. Tugui, G.T. Stiubianu, C.D. Varganici, C. Racles, M. Cazacu, and A.L. Skov, Soft silicone elastomers exhibiting large actuation strains. Journal of Applied Polymer Science, 139(22), p.52261, 2022. Doi: 10.1002/app.52261
-
[28]
W. Feng, L. Sun, Z. Jin, L. Chen, Y . Liu, H. Xu, and C. Wang, A large-strain and ultrahigh energy density dielectric elastomer for fast moving soft robot. Nature Communications, 15(1), p.4222, 2024. Doi: 10.1038/s41467-024-48243-y
-
[29]
B. Marciniec. ed., . Hydrosilylation: a comprehensive review on recent advances. 2009 Springer. Doi: 10.1007/978-1-4020-8172-9_4
-
[30]
P. Hu, J. Madsen, and A.L. Skov. One reaction to make highly stretchable or extremely soft silicone elastomers from easily available materials. Nature communications, 13(1), p.370. 2022, doi: 10.1038/s41467-022-28015-2
-
[31]
C.E. Corcione, R. Striani, and M. Frigione, UV-cured methacrylic-silica hybrids: Effect of oxygen inhibition on photo-curing kinetics. Thermochimica Acta, 576, pp.47-55. 2014. Doi: 10.1016/j.tca.2013.11.028
-
[32]
R. Chakraborty, and M.D. Soucek, Mechanical and film properties of telechelic methacrylic polysiloxanes with cycloaliphatic substituents groups for UV-curable applications. Silicon, 2(1), pp.61-69. 2010. Doi: 10.1007/s12633-010-9036-9
-
[33]
T. Zhao, R. Yu, S. Li, X. Li, Y . Zhang, X. Yang, X. Zhao, C. Wang, Z. Liu, R. Dou, and W. Huang, Superstretchable and processable silicone elastomers by digital light processing 3D printing. ACS applied materials & interfaces, 11(15), pp.14391-14398. 2019. Doi: 10.1021/acsami.9b03156
-
[34]
R.L.Cicero, M.R. Linford, and C.E. Chidsey. Photoreactivity of unsaturated compounds with hydrogen-terminated silicon (111). Langmuir, 16(13), pp.5688-5695. 2000. Doi: 10.1021/la9911990
-
[35]
W. Zhang, G. Jiang, and K. Liao, Synthesis of a Novel Platinum Catalyst and Its Application in the Photoactivated Hydrosilylation Reaction. Silicon 16, 5613–5623 (2024). Doi: 10.1007/s12633-024-03103-8
- [36]
-
[37]
H.C. deGroh III, C.C. Daniels, J.A. Dever, S.K Miller, D.L. Waters, J.R. Finkbeiner, P.H. Dunlap, and B.M. Steinetz, Space environment effects on silicone seal materials (No. NASA/ TM-2010-216332). 2010
work page 2010
-
[38]
F. Branz, and A. Francesconi, Experimental evaluation of a Dielectric Elastomer robotic arm for space applications. Acta Astronautica, 133, pp.324-333, (2017). Doi: 10.1016/ j.actaastro.2016.11.007
work page 2017
-
[39]
E. Acome, S.K. Mitchell, T.G. Morrissey, M.B. Emmett, C. Benjamin, M. King, M. Radakovitz, and C. Keplinger. Hydraulically amplified self-healing electrostatic actuators with muscle-like performance. Science, 359(6371), pp.61-65. (2018). Doi: 10.1126/ science.aao6139
work page 2018
-
[40]
N. Kellaris, V . Gopaluni Venkata, G.M Smith, S.K.Mitchell, C. and Keplinger, Peano- HASEL actuators: Muscle-mimetic, electrohydraulic transducers that linearly contract on activation. Science Robotics, 3(14), p.eaar3276, (2018). Doi: 10.1126/scirobotics.aar3276
-
[41]
M. Rivera, . Elastomers in space and in other high vacuum environments. Rubber Chemistry and Technology, 39(4), 1127–1140, (1966) https://doi.org/10.5254/1.3547123
-
[42]
T. Hiruta, N. Hosoya, S. Maeda, and I. Kajiwara, Experimental validation of vibration control in membrane structures using dielectric elastomer actuators in a vacuum environment. International Journal of Mechanical Sciences, 191, p.106049, (2021). Doi: 10.1016/ j.ijmecsci.2020.10604
-
[43]
R.H. Johnson, L.D Montierth, J.R. Dennison, J.S. Dyer, and E.R. Lindstrom, Small-scale simulation chamber for space environment survivability testing. IEEE Transactions on Plasma Science, 41(12), pp.3453-3458, (2013) Doi: 10.1109/TPS.2013.2281399
-
[44]
H. Craig Miller. Vacuum arcs. IEEE Transactions on Plasma Science, 51(7): 1585–1594, (2023), doi: 10.1109/TPS.2023.3261779
-
[45]
Y .Li, Y . Sun, and J.T. Yeow. Nanotube field electron emission: Principles, development, and applications. Nanotechnology, 26(24):242001, (2015). Doi: 10.1088/0957-4484/26/24/242001
-
[46]
F.B.Albuquerque, and H. Shea, Influence of humidity, temperature and prestretch on the dielectric breakdown strength of silicone elastomer membranes for DEAs. Smart Materials and Structures, 29(10), p.105024, (2020). Doi: 10.1088/1361-665X/aba5e3
-
[47]
A. Li, S Lee, H. Shahsa, and M. Duduta. Real time high voltage capacitance for rapid evaluation of dielectric elastomer actuators. Soft Matter, 18(37):7123–7130, (2022) doi: 10.1039/D2SM00690A
-
[48]
A. Li, P. Cuvin, S. Lee, J. Gu, C. Tugui, and M. Duduta, Data-Driven Long-Term Energy Efficiency Prediction of Dielectric Elastomer Artificial Muscles. Advanced Functional Materials, 34(42), p.2406710, (2024), doi: 10.1002/adfm.202406710
-
[49]
M. Matysek, P. Lotz, and H. Schlaak. Lifetime investigation of dielectric elastomer stack actuators. IEEE Transactions on Dielectrics and Electrical Insulation, 18(1):89–96, (2011). 10.1109/TDEI.2011.5704497
-
[50]
F. Carpi, I. Anderson, S. Bauer, G. Frediani, G. Gallone, M. Gei, C. Graaf, C. Jean- Mistral, W. Kaal, G. Kofod, and M. Kollosche, Standards for dielectric elastomer transducers. Smart Materials and Structures, 24(10), p.105025, (2015). Doi: 10.1088/0964-1726/24/10/105025
-
[51]
R.K. Katzschmann, J. DelPreto, R. MacCurdy, and D. Rus, Exploration of underwater life with an acoustically controlled soft robotic fish. Science Robotics, 3(16), p.eaar3449. (2018) doi: 10.1126/scirobotics.aar3449
- [52]
-
[53]
All data are available in the main text or the supplementary materials
S. Klomchitcharoen, P. Wechakarn, T. Tangwattanasirikun, N. Smerwong, P. Netrapathompornkij, T. Chatmeeboon, N. Nangsue, V . Thitasirivit, K. Kaweewongsunthorn, S. Piyanopharoj, and P. Phumiprathet, High-altitude balloon platform for studying the biological response of living organisms exposed to near-space environments. Heliyon, 10(6). (2024) doi: 10.101...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.