MFE: A Multimodal Hand Exoskeleton with Interactive Force, Pressure and Thermo-haptic Feedback
Pith reviewed 2026-05-13 20:03 UTC · model grok-4.3
The pith
A hand exoskeleton integrates force, pressure and thermal feedback to enhance robotic teleoperation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
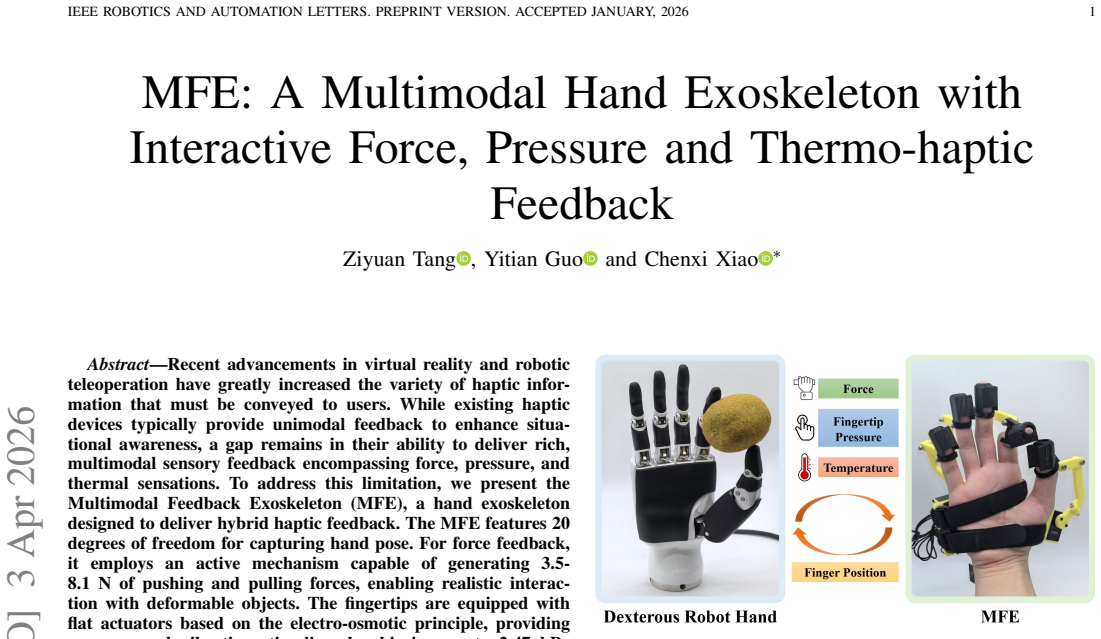
The MFE is a hand exoskeleton with 20 degrees of freedom that provides hybrid haptic feedback through an active force mechanism generating 3.5 to 8.1 N, electro-osmotic actuators delivering up to 2.47 kPa pressure and vibrations at the fingertips, and thermoelectric heat pumps rendering temperatures between 10 and 55 degrees Celsius. Integration into a robotic teleoperation setup with the X-Arm 6 and Inspire Hand allowed users in studies to successfully identify and handle objects with varying deformability and temperatures.
What carries the argument
The Multimodal Feedback Exoskeleton (MFE) that uses active force actuators, electro-osmotic pressure and vibration modules, and thermoelectric thermal pumps to deliver combined sensations.
Load-bearing premise
The force, pressure, and thermal feedback systems can function at the same time without one affecting the others, and users can interpret the mixed signals correctly.
What would settle it
An experiment showing that users cannot reliably identify object temperatures or deformability when all feedback modes are active simultaneously.
Figures






read the original abstract
Recent advancements in virtual reality and robotic teleoperation have greatly increased the variety of haptic information that must be conveyed to users. While existing haptic devices typically provide unimodal feedback to enhance situational awareness, a gap remains in their ability to deliver rich, multimodal sensory feedback encompassing force, pressure, and thermal sensations. To address this limitation, we present the Multimodal Feedback Exoskeleton (MFE), a hand exoskeleton designed to deliver hybrid haptic feedback. The MFE features 20 degrees of freedom for capturing hand pose. For force feedback, it employs an active mechanism capable of generating 3.5-8.1 N of pushing and pulling forces at the fingers' resting pose, enabling realistic interaction with deformable objects. The fingertips are equipped with flat actuators based on the electro-osmotic principle, providing pressure and vibration stimuli and achieving up to 2.47 kPa of contact pressure to render tactile sensations. For thermal feedback, the MFE integrates thermoelectric heat pumps capable of rendering temperatures from 10 to 55 degrees Celsius. We validated the MFE by integrating it into a robotic teleoperation system using the X-Arm 6 and Inspire Hand manipulator. In user studies, participants successfully recognized and manipulated deformable objects and differentiated remote objects with varying temperatures. These results demonstrate that the MFE enhances situational awareness, as well as the usability and transparency of robotic teleoperation systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents the Multimodal Feedback Exoskeleton (MFE), a hand exoskeleton with 20 DoF for pose capture that integrates active force feedback (3.5-8.1 N push/pull at resting pose), electro-osmotic flat actuators for pressure/vibration (up to 2.47 kPa), and thermoelectric heat pumps for thermal feedback (10-55°C). It describes integration with the X-Arm 6 and Inspire Hand for teleoperation and reports user studies in which participants successfully recognized deformable objects and differentiated remote object temperatures.
Significance. If the multimodal actuators can operate concurrently without mechanical, thermal, or perceptual interference, the MFE would represent a concrete advance in hybrid haptic interfaces for teleoperation and VR, addressing the gap between unimodal devices and rich sensory feedback. The explicit actuator performance numbers and basic validation through object/temperature recognition tasks provide a useful hardware reference point for the field.
major comments (3)
- [Abstract] Abstract: The claims of successful object recognition and temperature differentiation in user studies are presented without error bars, statistical tests, participant counts, success rates, or comparison to unimodal baselines, leaving the central validation of enhanced situational awareness only partially supported.
- [Validation / User Studies] Validation / User Studies: No quantitative data, power budgets, response curves, or interference measurements are provided for simultaneous operation of the force, electro-osmotic, and thermoelectric actuators on the same fingertip, despite this being required for the multimodal feedback claim and the weakest assumption identified in the work.
- [Methods] Methods: Full experimental protocols for the user studies (including how multimodal stimuli were delivered, task instructions, and any assessment of cross-modal confusion) are absent, preventing evaluation of whether users could reliably parse combined sensations as asserted.
minor comments (1)
- [Abstract] Abstract: The force range 3.5-8.1 N is stated without clarifying whether it varies by finger, actuator configuration, or measurement condition.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and outline the revisions we will implement to strengthen the presentation of our results and methods.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claims of successful object recognition and temperature differentiation in user studies are presented without error bars, statistical tests, participant counts, success rates, or comparison to unimodal baselines, leaving the central validation of enhanced situational awareness only partially supported.
Authors: We agree that the abstract would be strengthened by including key quantitative details. In the revised manuscript we will update the abstract to report the number of participants, success rates for object recognition and temperature differentiation tasks, and a brief statement that statistical tests confirmed significant differences from chance. Full error bars, p-values, and any unimodal baseline comparisons will be retained and expanded in the Results section due to abstract length limits. revision: yes
-
Referee: [Validation / User Studies] Validation / User Studies: No quantitative data, power budgets, response curves, or interference measurements are provided for simultaneous operation of the force, electro-osmotic, and thermoelectric actuators on the same fingertip, despite this being required for the multimodal feedback claim and the weakest assumption identified in the work.
Authors: We acknowledge this gap in the current validation. The revised manuscript will add power budget figures and individual actuator response curves from our characterization tests. For concurrent operation we will include the available integration-test data on combined power draw and any measured mechanical or thermal crosstalk; where full perceptual interference data are not yet available we will explicitly note this as a limitation and describe planned follow-up experiments. revision: partial
-
Referee: [Methods] Methods: Full experimental protocols for the user studies (including how multimodal stimuli were delivered, task instructions, and any assessment of cross-modal confusion) are absent, preventing evaluation of whether users could reliably parse combined sensations as asserted.
Authors: We will substantially expand the Methods section to include complete experimental protocols: precise timing and intensity parameters for delivering combined force-pressure-thermal stimuli, verbatim task instructions provided to participants, and any post-trial questionnaires or observations used to assess cross-modal confusion or perceptual interference. This additional detail will allow readers to evaluate the reliability of the multimodal feedback. revision: yes
Circularity Check
No circularity: hardware description with empirical measurements
full rationale
The paper presents a physical exoskeleton design and reports measured performance values (force ranges, pressure, temperature) obtained from component specifications and user studies. There are no equations, derivations, fitted parameters, predictions, or self-citation chains that reduce any claim to its own inputs by construction. The central claims rest on direct engineering integration and experimental validation rather than any self-referential logic.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Electro-osmotic actuators and thermoelectric pumps perform as specified when integrated into a wearable exoskeleton without mutual interference.
Reference graph
Works this paper leans on
-
[1]
A shared autonomy reconfigurable control framework for telemanipulation of multi-arm systems,
I. Ozdamar, M. Laghi, G. Grioli, A. Ajoudani, M. G. Catalano, and A. Bicchi, “A shared autonomy reconfigurable control framework for telemanipulation of multi-arm systems,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 9937–9944, 2022
work page 2022
-
[2]
Haptic feedback and force- based teleoperation in surgical robotics,
R. V . Patel, S. F. Atashzar, and M. Tavakoli, “Haptic feedback and force- based teleoperation in surgical robotics,”Proceedings of the IEEE, vol. 110, no. 7, pp. 1012–1027, 2022
work page 2022
-
[3]
C. Xiao, A. B. Woeppel, G. M. Clepper, S. Gao, S. Xu, J. F. Rueschen, D. Kruse, W. Wu, H. Z. Tan, T. Lowet al., “Tactile and chemical sensing with haptic feedback for a telepresence explosive ordnance disposal robot,”IEEE Transactions on Robotics, vol. 39, no. 5, pp. 3368–3381, 2023
work page 2023
-
[4]
Human-agent joint learning for efficient robot manipulation skill acquisition,
S. Luo, Q. Peng, J. Lv, K. Hong, K. R. Driggs–Campbell, C. Lu, and Y . Li, “Human-agent joint learning for efficient robot manipulation skill acquisition,” in2025 IEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 1370–1377
work page 2025
-
[5]
Open- television: Teleoperation with immersive active visual feedback,
X. Cheng, J. Li, S. Yang, G. Yang, and X. Wang, “Open- television: Teleoperation with immersive active visual feedback,” in 8th Annual Conference on Robot Learning, 2024. [Online]. Available: https://openreview.net/forum?id=Yce2jeILGt
work page 2024
-
[6]
Humanft: A human-like fingertip multimodal visuo-tactile sensor,
Y . Wu, Y . Chen, Z. Zhu, X. Qin, and C. Xiao, “Humanft: A human-like fingertip multimodal visuo-tactile sensor,” in2025 IEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 244–250
work page 2025
-
[7]
A review on teleoperation of mobile ground robots: Architecture and situation awareness,
S. Opiyo, J. Zhou, E. Mwangi, W. Kai, and I. Sunusi, “A review on teleoperation of mobile ground robots: Architecture and situation awareness,”International Journal of Control, Automation and Systems, vol. 19, pp. 1384–1407, 2021
work page 2021
-
[8]
J. M. Riley, D. B. Kaber, and J. V . Draper, “Situation awareness and attention allocation measures for quantifying telepresence experiences in teleoperation,”Human Factors and Ergonomics in Manufacturing & Service Industries, vol. 14, no. 1, pp. 51–67, 2004
work page 2004
-
[9]
The impact of haptic feedback quality on the performance of teleoperated assembly tasks,
J. G. Wildenbeest, D. A. Abbink, C. J. Heemskerk, F. C. van der Helm, and H. Boessenkool, “The impact of haptic feedback quality on the performance of teleoperated assembly tasks,”IEEE Transactions on Haptics, vol. 6, no. 2, pp. 242–252, 2013
work page 2013
-
[10]
Bio- inspired grasping controller for sensorized 2-dof grippers,
L. Lach, S. Lemaignan, F. Ferro, H. Ritter, and R. Haschke, “Bio- inspired grasping controller for sensorized 2-dof grippers,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022, pp. 11 231–11 237
work page 2022
-
[11]
The critical tech- nologies of vascular interventional robotic catheterization: A review,
B. Ren, Y . Zhao, J. Zhang, H. Li, K. Li, and J. Zhang, “The critical tech- nologies of vascular interventional robotic catheterization: A review,” IEEE Sensors Journal, vol. 23, no. 24, pp. 30 051–30 069, 2023
work page 2023
-
[12]
Bimanual telemanipulation with force and haptic feedback and predictive limit avoidance,
C. Lenz and S. Behnke, “Bimanual telemanipulation with force and haptic feedback and predictive limit avoidance,” in2021 European Conference on Mobile Robots (ECMR), 2021, pp. 1–7
work page 2021
-
[13]
Multimodal zero- shot learning for tactile texture recognition,
G. Cao, J. Jiang, D. Bollegala, M. Li, and S. Luo, “Multimodal zero- shot learning for tactile texture recognition,”Robotics and Autonomous Systems, vol. 176, p. 104688, 2024
work page 2024
-
[14]
Objectfolder 2.0: A multisensory object dataset for sim2real transfer,
R. Gao, Z. Si, Y .-Y . Chang, S. Clarke, J. Bohg, L. Fei-Fei, W. Yuan, and J. Wu, “Objectfolder 2.0: A multisensory object dataset for sim2real transfer,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2022, pp. 10 598–10 608
work page 2022
-
[15]
Demonstrating RFUniverse: A Multiphysics Simulation Platform for Embodied AI,
H. Fu, W. Xu, R. Ye, H. Xue, Z. Yu, T. Tang, Y . Li, W. Du, J. Zhang, and C. Lu, “Demonstrating RFUniverse: A Multiphysics Simulation Platform for Embodied AI,” inProceedings of Robotics: Science and Systems, Daegu, Republic of Korea, July 2023
work page 2023
-
[16]
Haptix: Vibrotactile haptic feedback for communication of 3d directional cues,
M. Pascher, T. Franzen, K. Kronhardt, U. Gruenefeld, S. Schneegass, and J. Gerken, “Haptix: Vibrotactile haptic feedback for communication of 3d directional cues,” inExtended Abstracts of the 2023 CHI Conference on Human Factors in Computing Systems, ser. CHI EA ’23. New York, NY , USA: Association for Computing Machinery, 2023
work page 2023
-
[17]
Senseglove: Haptic force-feedback gloves for vr and robotics,
iCub Humanoid Robot Company, “Senseglove: Haptic force-feedback gloves for vr and robotics,” 2025. [Online]. Available: https: //www.senseglove.com/
work page 2025
-
[18]
Analysis of suture manipulation forces for teleoperation with force feedback,
M. Kitagawa, A. M. Okamura, B. T. Bethea, V . L. Gott, and W. A. Baumgartner, “Analysis of suture manipulation forces for teleoperation with force feedback,” inMedical Image Computing and Computer- Assisted Intervention—MICCAI 2002: 5th International Conference Tokyo, Japan, September 25–28, 2002 Proceedings, Part I 5. Springer, 2002, pp. 155–162
work page 2002
-
[19]
Bilateral robot teleoperation: A wearable arm exoskeleton featuring an intuitive user interface,
J. Rebelo, T. Sednaoui, E. B. Den Exter, T. Krueger, and A. Schiele, “Bilateral robot teleoperation: A wearable arm exoskeleton featuring an intuitive user interface,”IEEE Robotics & Automation Magazine, vol. 21, no. 4, pp. 62–69, 2014
work page 2014
-
[20]
C. Xiao, N. Madapana, and J. Wachs, “Fingers see things differently (fist-d): An object aware visualization and manipulation framework based on tactile observations,”IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 4249–4256, 2021
work page 2021
-
[21]
Haptiknit: Distributed stiffness knitting for wearable haptics,
C. du Pasquier, L. Tessmer, I. Scholl, L. Tilton, T. Chen, S. Tibbits, and A. Okamura, “Haptiknit: Distributed stiffness knitting for wearable haptics,”Science Robotics, vol. 9, no. 97, p. eado3887, 2024
work page 2024
-
[22]
A soft robotic haptic feedback glove for colonoscopy procedures,
A. Gerald, R. Batliwala, J. Ye, P. Hsu, H. Aihara, and S. Russo, “A soft robotic haptic feedback glove for colonoscopy procedures,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022, pp. 583–590
work page 2022
-
[23]
Fluid reality: High-resolution, untethered haptic gloves using electroosmotic pump arrays,
V . Shen, T. Rae-Grant, J. Mullenbach, C. Harrison, and C. Shultz, “Fluid reality: High-resolution, untethered haptic gloves using electroosmotic pump arrays,” inProceedings of the 36th Annual ACM Symposium on User Interface Software and Technology, 2023, pp. 1–20
work page 2023
-
[24]
Contactless haptic display through magnetic field control,
X. Lu, Y . Yan, B. Qi, H. Qian, J. Sun, and A. Quigley, “Contactless haptic display through magnetic field control,”IEEE Transactions on Haptics, vol. 15, no. 2, pp. 328–338, 2022
work page 2022
-
[25]
Feel it on your fingers: dataglove with vibrotactile feedback for virtual reality and telerobotics,
B. Junput, X. Wei, and L. Jamone, “Feel it on your fingers: dataglove with vibrotactile feedback for virtual reality and telerobotics,” inTo- wards Autonomous Robotic Systems: 20th Annual Conference, TAROS 2019, London, UK, July 3–5, 2019, Proceedings, Part I 20. Springer, 2019, pp. 375–385
work page 2019
-
[26]
S. Cai, P. Ke, T. Narumi, and K. Zhu, “Thermairglove: A pneumatic glove for thermal perception and material identification in virtual reality,” in2020 IEEE conference on virtual reality and 3D user interfaces (VR). IEEE, 2020, pp. 248–257
work page 2020
-
[27]
Hydroring: Supporting mixed reality haptics using liquid flow,
T. Han, F. Anderson, P. Irani, and T. Grossman, “Hydroring: Supporting mixed reality haptics using liquid flow,” inProceedings of the 31st Annual ACM Symposium on User Interface Software and Technology, 2018, pp. 913–925
work page 2018
-
[28]
Thermal display glove for interacting with virtual reality,
S.-W. Kim, S. H. Kim, C. S. Kim, K. Yi, J.-S. Kim, B. J. Cho, and Y . Cha, “Thermal display glove for interacting with virtual reality,” Scientific reports, vol. 10, no. 1, p. 11403, 2020
work page 2020
-
[29]
Evaluation of hand-tracking systems in teleoperation and virtual dexterous manipulation,
C. Mizera, T. Delrieu, V . Weistroffer, C. Andriot, A. Decatoire, and J.- P. Gazeau, “Evaluation of hand-tracking systems in teleoperation and virtual dexterous manipulation,”IEEE Sensors Journal, vol. 20, no. 3, pp. 1642–1655, 2020
work page 2020
-
[30]
AnyTeleop: A General Vision-Based Dexterous Robot Arm- Hand Teleoperation System,
Y . Qin, W. Yang, B. Huang, K. V . Wyk, H. Su, X. Wang, Y .-W. Chao, and D. Fox, “AnyTeleop: A General Vision-Based Dexterous Robot Arm- Hand Teleoperation System,” inProceedings of Robotics: Science and Systems, Daegu, Republic of Korea, July 2023
work page 2023
-
[31]
Dexpi- lot: Vision-based teleoperation of dexterous robotic hand-arm system,
A. Handa, K. Van Wyk, W. Yang, J. Liang, and e. a. Chao, “Dexpi- lot: Vision-based teleoperation of dexterous robotic hand-arm system,” in2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 9164–9170
work page 2020
-
[32]
Vision-based teleoperation of shadow dexterous hand using end-to-end deep neural network,
S. Li, X. Ma, H. Liang, M. G ¨orner, P. Ruppel, B. Fang, F. Sun, and J. Zhang, “Vision-based teleoperation of shadow dexterous hand using end-to-end deep neural network,” in2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 416–422
work page 2019
-
[33]
icub3 avatar system: Enabling remote fully immersive embodiment of humanoid robots,
S. Dafarra, U. Pattacini, G. Romualdi, L. Rapetti, R. Grieco, K. Darvish, G. Milani, E. Valli, I. Sorrentino, P. M. Viceconteet al., “icub3 avatar system: Enabling remote fully immersive embodiment of humanoid robots,”Science Robotics, vol. 9, no. 86, p. eadh3834, 2024
work page 2024
-
[34]
Haptx: Advanced haptic technology,
HaptX Inc., “Haptx: Advanced haptic technology,” 2025, accessed: 2025-02-24. [Online]. Available: https://haptx.com/
work page 2025
-
[35]
Teleoperation with the shadow robot hand,
Shadow Robot Company, “Teleoperation with the shadow robot hand,” https://www.shadowrobot.com/teleoperation/, 2024
work page 2024
-
[36]
Y . Zhao, J. Yang, Z. Du, M. Liu, X. Li, M. Zhu, and T. Chen, “Fully screen printed tailorable triboelectric sensing and thermal feedback tapes for exoskeleton based immersive robotic and virtual teleoperation,”Nano Energy, vol. 142, p. 111255, 2025
work page 2025
-
[37]
Lucidgloves: Open-source cable-drive haptic gloves for vr,
LucidVR, “Lucidgloves: Open-source cable-drive haptic gloves for vr,”
-
[38]
Available: https://github.com/LucidVR/lucidgloves
[Online]. Available: https://github.com/LucidVR/lucidgloves
-
[39]
DOGlove: Dexterous Manipu- lation with a Low-Cost Open-Source Haptic Force Feedback Glove,
H. Zhang, S. Hu, Z. Yuan, and H. Xu, “DOGlove: Dexterous Manipu- lation with a Low-Cost Open-Source Haptic Force Feedback Glove,” in Proceedings of Robotics: Science and Systems, LosAngeles, CA, USA, June 2025
work page 2025
-
[40]
Flat panel haptics: Embedded electroosmotic pumps for scalable shape displays,
C. Shultz and C. Harrison, “Flat panel haptics: Embedded electroosmotic pumps for scalable shape displays,” inProceedings of the 2023 CHI Conference on Human Factors in Computing Systems, 2023, pp. 1–16
work page 2023
-
[41]
M. Vergara, J. L. Sancho-Bru, V . Gracia-Ib´a˜nez, and A. P´erez-Gonz´alez, “An introductory study of common grasps used by adults during perfor- mance of activities of daily living,”Journal of Hand Therapy, vol. 27, no. 3, pp. 225–234, 2014
work page 2014
-
[42]
Tactual discrimination of soft- ness,
M. A. Srinivasan and R. H. LaMotte, “Tactual discrimination of soft- ness,”Journal of Neurophysiology, vol. 73, no. 1, pp. 88–101, 1995
work page 1995
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.