Recognition: no theorem link
A Flow Matching Framework for Soft-Robot Inverse Dynamics
Pith reviewed 2026-05-13 19:36 UTC · model grok-4.3
The pith
Conditional flow matching learns soft-robot inverse dynamics as a generative map, reducing tracking RMSE by more than 50 percent.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
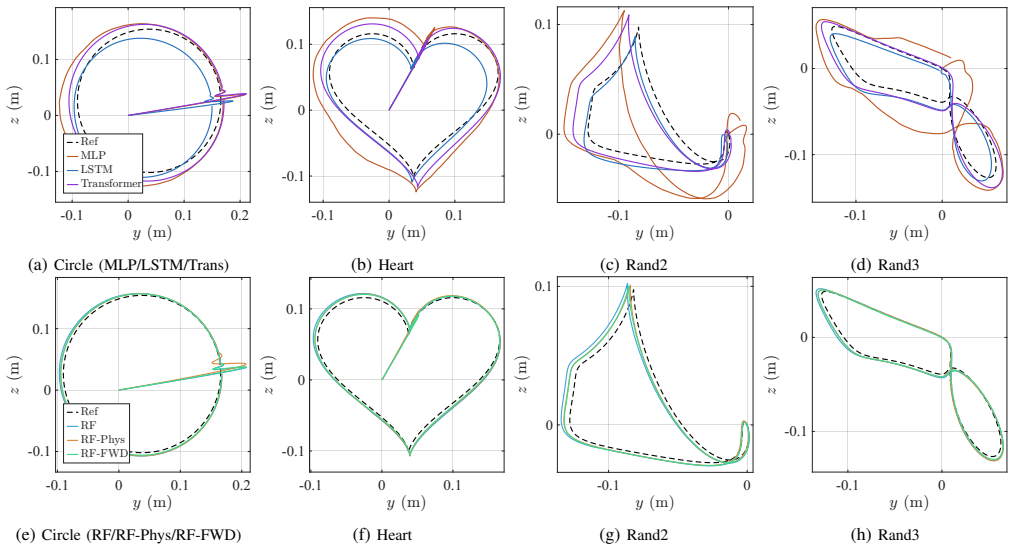
The central claim is that reformulating inverse dynamics as a conditional flow-matching problem with Rectified Flow produces physically consistent control sequences rather than conditional averages. The RF-Physical variant adds a physics-based prior for residual modeling, while the RF-FWD variant adds a forward-dynamics consistency loss during training. Evaluations show this yields over 50 percent lower trajectory-tracking RMSE than MLP, LSTM, and Transformer baselines and supports stable open-loop execution at a peak end-effector speed of 1.14 m/s with 0.995 ms inference latency.
What carries the argument
Rectified Flow used as a conditional generative transport map that converts desired trajectories into sequences of control inputs, augmented by either a physics prior or a forward-consistency loss.
Load-bearing premise
That the flow-matching outputs remain physically realizable for arbitrary soft-robot shapes and actuation schemes without extra tuning or safety constraints.
What would settle it
A test on a new soft-robot geometry or actuation scheme in which the generated open-loop controls produce large trajectory deviations or instability would falsify the claim of reliable physical consistency.
Figures








read the original abstract
Learning the inverse dynamics of soft continuum robots remains challenging due to high-dimensional nonlinearities and complex actuation coupling. Conventional feedback-based controllers often suffer from control chattering due to corrective oscillations, while deterministic regression-based learners struggle to capture the complex nonlinear mappings required for accurate dynamic tracking. Motivated by these limitations, we propose an inverse-dynamics framework for open-loop feedforward control that learns the system's differential dynamics as a generative transport map. Specifically, inverse dynamics is reformulated as a conditional flow-matching problem, and Rectified Flow (RF) is adopted as a lightweight instance to generate physically consistent control inputs rather than conditional averages. Two variants are introduced to further enhance physical consistency: RF-Physical, utilizing a physics-based prior for residual modeling; and RF-FWD, integrating a forward-dynamics consistency loss during flow matching. Extensive evaluations demonstrate that our framework reduces trajectory tracking RMSE by over 50% compared to standard regression baselines (MLP, LSTM, Transformer). The system sustains stable open-loop execution at a peak end-effector velocity of 1.14 m/s with sub-millisecond inference latency (0.995 ms). This work demonstrates flow matching as a robust, high-performance paradigm for learning differential inverse dynamics in soft robotic systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to introduce a conditional flow-matching framework using Rectified Flow for learning inverse dynamics of soft continuum robots. It proposes two variants: RF-Physical incorporating a physics-based prior for residual modeling and RF-FWD with a forward-dynamics consistency loss. The framework is evaluated to achieve over 50% reduction in trajectory tracking RMSE compared to MLP, LSTM, and Transformer baselines, while enabling stable open-loop control at a peak end-effector velocity of 1.14 m/s with 0.995 ms inference latency.
Significance. If validated with complete experimental details, the work is significant because it applies generative flow-matching techniques to soft-robot inverse dynamics, potentially offering better handling of nonlinearities and complex couplings than deterministic methods. The reported low-latency inference supports practical deployment in real-time control systems. The integration of physical priors and consistency losses represents a thoughtful adaptation of the method to the domain.
major comments (3)
- [Experimental Evaluation] The reported >50% RMSE reduction and performance metrics lack details on the volume of training data, the hyperparameter search process, whether statistical significance was evaluated across multiple runs, and if the baseline models (MLP, LSTM, Transformer) received equivalent tuning and training conditions. These omissions make it difficult to fully assess the strength of the central performance claim.
- [Method Description (RF-FWD)] While the forward-dynamics consistency loss is proposed to promote physical consistency, the manuscript does not include an analysis or bound demonstrating that this loss enforces realizability for arbitrary soft-robot geometries and actuation schemes, as required for the generalization implied in the abstract.
- [Results and Discussion] The stable open-loop execution is demonstrated only on the specific platform evaluated; without tests on varied geometries or coupling changes, the claim that the approach works for arbitrary soft-robot systems rests on an untested assumption about the transferability of the learned transport map.
minor comments (2)
- [Notation and Equations] The conditional flow-matching objective and the specific forms of the new loss terms could benefit from more explicit equation references to the standard rectified flow formulation for clarity.
- [References] Additional citations to recent works on generative models for robot control or flow matching applications in dynamics learning would strengthen the positioning of the contribution.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the positive evaluation of the work's significance. We address each major comment below, indicating the revisions planned for the manuscript.
read point-by-point responses
-
Referee: [Experimental Evaluation] The reported >50% RMSE reduction and performance metrics lack details on the volume of training data, the hyperparameter search process, whether statistical significance was evaluated across multiple runs, and if the baseline models (MLP, LSTM, Transformer) received equivalent tuning and training conditions. These omissions make it difficult to fully assess the strength of the central performance claim.
Authors: We agree that these details are essential for a complete evaluation. In the revised manuscript, we will expand the experimental section to report the training data volume, including the number of trajectories collected and total samples used. We will describe the hyperparameter optimization procedure employed for all models. Additionally, we will present results averaged over multiple independent runs with different random seeds, including standard deviations to demonstrate statistical significance. We confirm that the baseline models were trained and tuned under equivalent conditions using the same data splits and search ranges for hyperparameters. revision: yes
-
Referee: [Method Description (RF-FWD)] While the forward-dynamics consistency loss is proposed to promote physical consistency, the manuscript does not include an analysis or bound demonstrating that this loss enforces realizability for arbitrary soft-robot geometries and actuation schemes, as required for the generalization implied in the abstract.
Authors: We appreciate this point and acknowledge the value of a more formal analysis. The forward-dynamics consistency loss is formulated to minimize the discrepancy between the predicted controls and those that would produce the observed states via the forward model, thereby encouraging the generated trajectories to be physically realizable under the learned dynamics. In the revision, we will include a detailed explanation of this mechanism, along with empirical evidence from our experiments showing improved consistency. While a general theoretical bound for arbitrary geometries would strengthen the claims further, it may require assumptions on the forward model accuracy that are platform-specific; we will clarify the scope in the updated text. revision: partial
-
Referee: [Results and Discussion] The stable open-loop execution is demonstrated only on the specific platform evaluated; without tests on varied geometries or coupling changes, the claim that the approach works for arbitrary soft-robot systems rests on an untested assumption about the transferability of the learned transport map.
Authors: We concur that validation on multiple platforms would provide stronger evidence for broad applicability. The current experiments focus on a representative soft continuum robot to demonstrate the framework's effectiveness. The method itself is designed to be geometry-agnostic, relying on data-driven learning of the transport map conditioned on the system state. In the revised manuscript, we will add a dedicated discussion section addressing the generalization assumptions, potential limitations regarding transferability, and outline plans for future multi-platform evaluations. No new experiments are planned for this revision due to resource constraints, but the core claims will be appropriately qualified. revision: partial
Circularity Check
No circularity in derivation chain
full rationale
The paper reformulates inverse dynamics as a conditional flow-matching problem using the established Rectified Flow method, then adds two variants (RF-Physical with a physics-based residual prior and RF-FWD with a forward-dynamics consistency loss). These are standard adaptations of existing generative modeling techniques rather than self-definitional or fitted-input reductions. The reported >50% RMSE improvement and 1.14 m/s open-loop performance are presented as empirical results on evaluated platforms, not algebraically forced by the choice of parameters or by self-citation chains. No load-bearing step reduces to its own inputs by construction, and the central claims remain independent of any cited prior work by the same authors.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Rectified Flow provides a valid transport map from noise to physically consistent control inputs when conditioned on robot state and desired trajectory
Reference graph
Works this paper leans on
-
[1]
Design, fabrication and control of soft robots,
D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,”Nature, vol. 521, no. 7553, pp. 467–475, 2015
work page 2015
-
[2]
Control strategies for soft robotic manipulators: A survey,
T. G. Thuruthel, Y . Ansari, E. Falotico, and C. Laschi, “Control strategies for soft robotic manipulators: A survey,”Soft Robotics, vol. 5, no. 2, pp. 149–163, 2018
work page 2018
-
[3]
First-order dynamic modeling and control of soft robots,
T. G. Thuruthel, F. Renda, and F. Iida, “First-order dynamic modeling and control of soft robots,”Frontiers in Robotics and AI, vol. 7, p. 95, 2020
work page 2020
-
[4]
Data-driven methods for sensing, modeling and control of soft continuum robot: A review,
J. Liu, Y . Duo, X. Chen, Z. Zuo, Y . Liu, and L. Wen, “Data-driven methods for sensing, modeling and control of soft continuum robot: A review,”IEEE/ASME Transactions on Mechatronics, vol. 30, no. 6, pp. 5520–5530, 2025
work page 2025
-
[5]
Control of soft robots with inertial dynamics,
D. A. Haggerty, M. J. Banks, E. Kamenar, A. B. Cao, P. C. Curtis, I. Mezic, and E. W. Hawkes, “Control of soft robots with inertial dynamics,”Science Robotics, vol. 8, no. 81, p. eadd6864, 2023
work page 2023
-
[6]
J. Licher, M. Bartholdt, H. Krauss, T.-L. Habich, T. Seel, and M. Schappler, “Adaptive model-predictive control of a soft continuum robot using a physics-informed neural network based on cosserat rod theory,” 2025
work page 2025
-
[7]
Stable open loop control of soft robotic manipulators,
T. G. Thuruthel, E. Falotico, M. Manti, and C. Laschi, “Stable open loop control of soft robotic manipulators,”IEEE Robotics and Automation Letters, vol. 3, no. 2, pp. 1292–1298, 2018
work page 2018
-
[8]
Fem-based nonlinear controller for a soft trunk robot,
K. Wu and G. Zheng, “Fem-based nonlinear controller for a soft trunk robot,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5735– 5740, 2022
work page 2022
-
[9]
A. T. Mathew, D. Feliu-Talegon, A. Y . Alkayas, F. Boyer, and F. Renda, “Reduced order modeling of hybrid soft-rigid robots using global, local, and state-dependent strain parameterization,”The Inter- national Journal of Robotics Research, vol. 44, no. 1, pp. 129–154, 2025
work page 2025
-
[10]
G. S. Chirikjian,Theory and applications of hyper-redundant robotic manipulators. California Institute of Technology, 1992
work page 1992
-
[11]
A. Doroudchi and S. Berman, “Configuration tracking for soft con- tinuum robotic arms using inverse dynamic control of a cosserat rod model,” in2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), 2021, pp. 207–214
work page 2021
-
[12]
Data-driven methods ap- plied to soft robot modeling and control: A review,
Z. Chen, F. Renda, A. Le Gall, L. Mocellin, M. Bernabei, T. Dangel, G. Ciuti, M. Cianchetti, and C. Stefanini, “Data-driven methods ap- plied to soft robot modeling and control: A review,”IEEE Transactions on Automation Science and Engineering, vol. 22, pp. 2241–2256, 2025
work page 2025
-
[13]
Efficient jacobian-based inverse kinematics with sim-to-real transfer of soft robots by learning,
G. Fang, Y . Tian, Z.-X. Yang, J. M. P. Geraedts, and C. C. L. Wang, “Efficient jacobian-based inverse kinematics with sim-to-real transfer of soft robots by learning,” 2020
work page 2020
-
[14]
A recurrent neural- network-based real-time dynamic model for soft continuum manipu- lators,
A. Tariverdi, V . K. Venkiteswaran, M. Richter, O. J. Elle, J. Torresen, K. Mathiassen, S. Misra, and O. G. Martinsen, “A recurrent neural- network-based real-time dynamic model for soft continuum manipu- lators,”Frontiers in Robotics and AI, vol. 8, p. 631303, 2021
work page 2021
-
[15]
Soft robot control with a learned differentiable model,
J. M. Bern, Y . Schnider, P. Banzet, N. Kumar, and S. Coros, “Soft robot control with a learned differentiable model,” in2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), 2020, pp. 417– 423
work page 2020
-
[16]
Data-driven control of soft robots using koopman operator theory,
D. Bruder, X. Fu, R. B. Gillespie, C. D. Remy, and R. Vasudevan, “Data-driven control of soft robots using koopman operator theory,” IEEE Transactions on Robotics, vol. 37, no. 3, pp. 948–961, 2021
work page 2021
-
[17]
Deep koopman approach for nonlinear dynamics and control of tendon-driven contin- uum robots,
N. Feizi, F. C. Pedrosa, J. Jayender, and R. V . Patel, “Deep koopman approach for nonlinear dynamics and control of tendon-driven contin- uum robots,”IEEE Robotics and Automation Letters, vol. 10, no. 3, pp. 2926–2933, 2025
work page 2025
-
[18]
M. Giorelli, F. Renda, M. Calisti, A. Arienti, G. Ferri, and C. Laschi, “Neural network and jacobian method for solving the inverse statics of a cable-driven soft arm with nonconstant curvature,”IEEE Trans- actions on Robotics, vol. 31, no. 4, pp. 823–834, 2015
work page 2015
-
[19]
An inverse dynamics-based control approach for com- pliant control of pneumatic artificial muscles,
C. V . Baysal, “An inverse dynamics-based control approach for com- pliant control of pneumatic artificial muscles,”Actuators, vol. 11, no. 4, p. 111, 2022
work page 2022
-
[20]
Y . Zhang, J. Wu, P. Huang, C.-Y . Su, and Y . Wang, “Inverse dynamics modelling and tracking control of conical dielectric elastomer actuator based on GRU neural network,”Engineering Applications of Artificial Intelligence, vol. 118, p. 105668, 2023
work page 2023
-
[21]
Learning-based inverse dynamic controller for throwing tasks with a soft robotic arm,
D. Bianchi, M. Antonelli, C. Laschi, A. Sabatini, and E. Falotico, “Learning-based inverse dynamic controller for throwing tasks with a soft robotic arm,” inProceedings of the 20th International Conference on Informatics in Control, Automation and Robotics, 2023, pp. 424– 432
work page 2023
-
[22]
Diffusion policy: Visuomotor policy learning via action diffusion,
C. Chi, Z. Xu, S. S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion policy: Visuomotor policy learning via action diffusion,”The International Journal of Robotics Research, 2024
work page 2024
-
[23]
Flow straight and fast: Learning to generate and transfer data with rectified flow,
X. Liu, C. Gong, and Q. Liu, “Flow straight and fast: Learning to generate and transfer data with rectified flow,” inThe Eleventh International Conference on Learning Representations, 2023
work page 2023
-
[24]
Flow matching for generative modeling,
Y . Lipman, R. T. Q. Chen, H. Ben-Hamu, M. Nickel, and M. Le, “Flow matching for generative modeling,” inThe Eleventh International Conference on Learning Representations, 2023
work page 2023
-
[25]
E. Cosserat and F. Cosserat,Th ´eorie des corps d ´eformables. Paris: Hermann, 1909
work page 1909
-
[26]
Real-time dynamics of soft and continuum robots based on cosserat rod models,
J. Till, V . Aloi, and C. Rucker, “Real-time dynamics of soft and continuum robots based on cosserat rod models,”The International Journal of Robotics Research, vol. 38, no. 6, pp. 723–746, 2019
work page 2019
-
[27]
Geometrically exact models for soft robotic manipulators,
D. Trivedi, A. Lotfi, and C. D. Rahn, “Geometrically exact models for soft robotic manipulators,”IEEE Transactions on Robotics, vol. 24, no. 4, pp. 773–780, 2008
work page 2008
-
[28]
F. Renda, C. Armanini, V . Lebastard, F. Candelier, and F. Boyer, “A geometric variable-strain approach for static modeling of soft manipulators with tendon and fluidic actuation,”IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 4006–4013, 2020
work page 2020
-
[29]
F. Yang, H. Yang, I. Alsarraj, Y . Wang, and K. Wu, “Lightweight dy- namic modeling of cable-driven continuum robots based on actuation- space energy formulation,” 2025
work page 2025
-
[30]
Open-loop model- free dynamic control of a soft manipulator for tracking tasks,
A. Centurelli, A. Rizzo, S. Tolu, and E. Falotico, “Open-loop model- free dynamic control of a soft manipulator for tracking tasks,” in2021 20th International Conference on Advanced Robotics (ICAR), 2021, pp. 128–133
work page 2021
-
[31]
High-precision dynamic control of soft robots with the physics-learning hybrid modeling approach,
X. Huang, Y . Rong, and G. Gu, “High-precision dynamic control of soft robots with the physics-learning hybrid modeling approach,” IEEE/ASME Transactions on Mechatronics, vol. 30, no. 3, pp. 1658– 1669, 2025
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.