Recognition: no theorem link
Redefining End-of-Life: Intelligent Automation for Electronics Remanufacturing Systems
Pith reviewed 2026-05-13 19:18 UTC · model grok-4.3
The pith
Robotics, control, and AI integration enables scalable remanufacturing of end-of-life electronics
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Remanufacturing end-of-life electronics is more challenging than new manufacturing due to uncertainty and variability, but integrating robotics, control, and AI can create scalable, safe, and intelligent systems. This is achieved through advanced methods for perception, decision-making under uncertainty, and force-aware manipulation in processes like disassembly and sorting. Emerging techniques such as foundation models and digital twins further support adaptable operations.
What carries the argument
The joint application of robotics, control, and artificial intelligence for multimodal perception, decision-making under uncertainty, flexible planning, and force-aware manipulation in remanufacturing processes.
If this is right
- Next-generation remanufacturing systems achieve robust and efficient operation despite complex challenges.
- Systems become adaptable to the incompleteness of end-of-life products.
- Support for circular economy through better material recovery from electronics.
- Incorporation of human-in-the-loop integration improves safety and decision-making.
Where Pith is reading between the lines
- Implementing these integrated systems could significantly cut down on electronic waste in landfills.
- The framework might extend to other remanufacturing areas like automotive parts with similar variability issues.
- Testing with real-world data from specific electronics categories could reveal integration barriers not covered in the review.
Load-bearing premise
That surveyed methods in robotics, AI, and control can be combined effectively to manage the variability and uncertainty in end-of-life products.
What would settle it
Observing that no current combination of these technologies successfully remanufactures a representative sample of varied end-of-life electronics without high failure rates would falsify the central claim.
Figures







read the original abstract
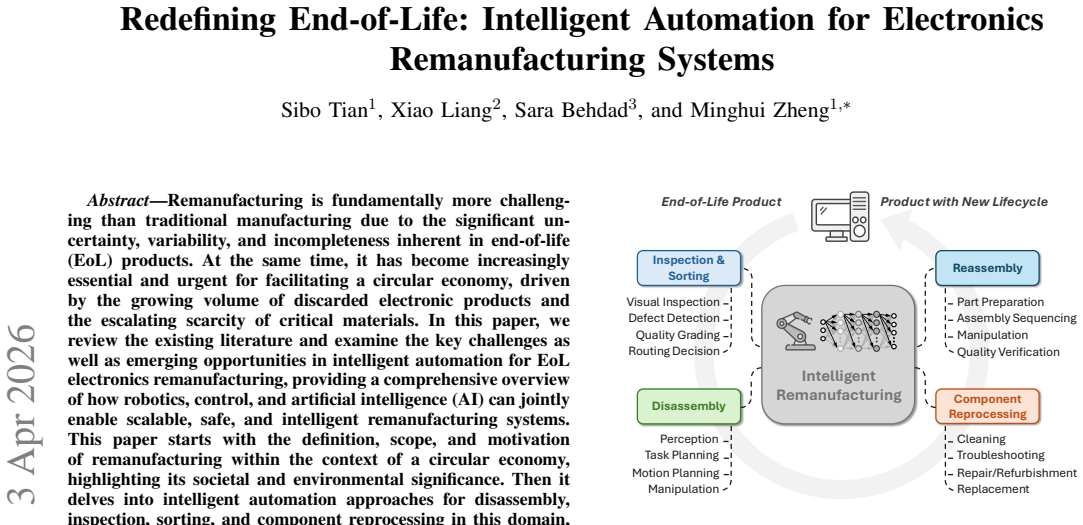
Remanufacturing is fundamentally more challenging than traditional manufacturing due to the significant uncertainty, variability, and incompleteness inherent in end-of-life (EoL) products. At the same time, it has become increasingly essential and urgent for facilitating a circular economy, driven by the growing volume of discarded electronic products and the escalating scarcity of critical materials. In this paper, we review the existing literature and examine the key challenges as well as emerging opportunities in intelligent automation for EoL electronics remanufacturing, providing a comprehensive overview of how robotics, control, and artificial intelligence (AI) can jointly enable scalable, safe, and intelligent remanufacturing systems. This paper starts with the definition, scope, and motivation of remanufacturing within the context of a circular economy, highlighting its societal and environmental significance. Then it delves into intelligent automation approaches for disassembly, inspection, sorting, and component reprocessing in this domain, covering advanced methods for multimodal perception, decision-making under uncertainty, flexible planning algorithms, and force-aware manipulation. The paper further reviews several emerging techniques, including large foundation models, human-in-the-loop integration, and digital twins that have the potential to support future research in this area. By integrating these topics, we aim to illustrate how next-generation remanufacturing systems can achieve robust, adaptable, and efficient operation in the face of complex real-world challenges.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript is a literature review on intelligent automation for remanufacturing end-of-life (EoL) electronics. It defines remanufacturing in the circular economy context, motivates its importance due to uncertainty and material scarcity, surveys robotics/control/AI methods for disassembly, inspection, sorting, and reprocessing (including multimodal perception, decision-making under uncertainty, flexible planning, and force-aware manipulation), and discusses emerging approaches such as foundation models, human-in-the-loop integration, and digital twins as enablers for scalable, safe, and adaptable systems.
Significance. If the coverage of the literature is representative and balanced, the review could provide a useful synthesis for researchers working at the intersection of robotics, control, and AI applied to sustainable manufacturing. By framing integration opportunities around real-world EoL variability, it may help prioritize future work on robust perception and planning; the explicit discussion of foundation models and digital twins adds timeliness, though the absence of new empirical results or proofs means significance rests on the quality and completeness of the survey rather than novel contributions.
major comments (2)
- [emerging techniques / abstract] The central claim that robotics, control, and AI 'can jointly enable scalable, safe, and intelligent remanufacturing systems' (abstract and emerging-techniques section) is presented as an illustration of potential rather than demonstrated integration. The review would be strengthened by citing at least one concrete case study or prototype where these domains have been combined to handle EoL incompleteness, as the current structure leaves the integration barriers (reader's weakest assumption) largely unaddressed.
- [intelligent automation approaches for disassembly, inspection, sorting, and component reprocessing] In the sections covering decision-making under uncertainty and flexible planning algorithms, the discussion of control-theoretic approaches (e.g., adaptive or robust control for variable EoL products) is high-level; without quantitative comparison to baseline methods or explicit discussion of how uncertainty models scale to real disassembly tasks, it is difficult to evaluate whether the surveyed techniques overcome the core variability challenge that underpins the paper's motivation.
minor comments (2)
- [definition, scope, and motivation] The motivation section would benefit from a short table or bullet list of quantitative indicators (e.g., annual EoL electronics tonnage, critical material recovery rates) to ground the societal significance claims.
- [throughout] Notation for key concepts such as 'multimodal perception' and 'force-aware manipulation' is introduced without a consistent glossary or cross-reference table, which could improve readability for readers outside the immediate subfield.
Simulated Author's Rebuttal
Thank you for the opportunity to respond to the referee's constructive report on our manuscript. We appreciate the feedback highlighting opportunities to strengthen the presentation of integration examples and the depth of coverage on control-theoretic methods. We address each major comment below and indicate planned revisions to the manuscript.
read point-by-point responses
-
Referee: The central claim that robotics, control, and AI 'can jointly enable scalable, safe, and intelligent remanufacturing systems' (abstract and emerging-techniques section) is presented as an illustration of potential rather than demonstrated integration. The review would be strengthened by citing at least one concrete case study or prototype where these domains have been combined to handle EoL incompleteness, as the current structure leaves the integration barriers (reader's weakest assumption) largely unaddressed.
Authors: We thank the referee for this observation. As a literature review, the manuscript synthesizes existing work rather than presenting new demonstrations; however, we agree that referencing a specific integrated prototype would better illustrate the claim. We will revise the emerging-techniques section to include a concrete case study of a robotic system combining multimodal perception, adaptive control, and AI-based planning for EoL electronics disassembly (drawing on published prototypes that address product incompleteness). We will also add a short discussion of key integration barriers, such as real-time computational constraints and data variability, to provide a more balanced view. These changes will be incorporated in the revised manuscript. revision: yes
-
Referee: In the sections covering decision-making under uncertainty and flexible planning algorithms, the discussion of control-theoretic approaches (e.g., adaptive or robust control for variable EoL products) is high-level; without quantitative comparison to baseline methods or explicit discussion of how uncertainty models scale to real disassembly tasks, it is difficult to evaluate whether the surveyed techniques overcome the core variability challenge that underpins the paper's motivation.
Authors: We acknowledge that the treatment of control-theoretic approaches is overview-level in the current draft. As the paper is a survey, we cannot introduce new quantitative comparisons; however, we will expand the relevant sections to cite specific studies that report quantitative metrics (e.g., success rates or robustness measures of adaptive/robust control versus standard methods in disassembly tasks). We will also add explicit discussion of how uncertainty models scale to real-world EoL variability, referencing literature on challenges such as model mismatch and computational scalability in flexible planning. These revisions will better link the surveyed techniques to the motivation on product uncertainty. revision: partial
Circularity Check
No significant circularity in this literature review
full rationale
The paper is explicitly framed as a survey synthesizing existing literature on robotics, control, and AI methods for disassembly, inspection, sorting, and reprocessing of end-of-life electronics. It presents no new derivations, equations, predictions, fitted parameters, or uniqueness theorems. Central claims are overview assertions about potential integrations of surveyed techniques, supported by external references rather than self-referential reductions. No load-bearing steps reduce to inputs by construction, self-citation chains, or ansatz smuggling, satisfying the criteria for a self-contained review with score 0.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
H. Ghimire and P. A. Ariya, “E-wastes: bridging the knowledge gaps in global production budgets, composition, recycling and sustainability implications,”Sustainable Chemistry, vol. 1, no. 2, pp. 154–182, 2020
work page 2020
-
[2]
C. P. Bald ´e, R. Kuehr, T. Yamamoto, R. McDonald, E. D’Angelo, S. Althaf, G. Bel, O. Deubzer, E. Fernandez-Cubillo, V . Fortiet al., “Global e-waste monitor 2024,” 2024
work page 2024
-
[3]
Challenges in metal recycling,
B. K. Reck and T. E. Graedel, “Challenges in metal recycling,”Science, vol. 337, no. 6095, pp. 690–695, 2012
work page 2012
-
[4]
Smart remanufacturing: a review and research framework,
M. Kerin and D. T. Pham, “Smart remanufacturing: a review and research framework,”Journal of Manufacturing Technology Manage- ment, vol. 31, no. 6, pp. 1205–1235, 2020
work page 2020
-
[5]
A review of prospects and opportunities in disassembly with human–robot collaboration,
M.-L. Lee, X. Liang, B. Hu, G. Onel, S. Behdad, and M. Zheng, “A review of prospects and opportunities in disassembly with human–robot collaboration,”Journal of Manufacturing Science and Engineering, vol. 146, no. 2, p. 020902, 2024
work page 2024
-
[6]
J. Xiao and K. Huang, “A comprehensive review on human–robot collaboration remanufacturing towards uncertain and dynamic disas- sembly,”Manufacturing Review, vol. 11, p. 17, 2024
work page 2024
-
[7]
I. D’Adamo, P. Rosa, and S. Terzi, “Challenges in waste electrical and electronic equipment management: A profitability assessment in three european countries,”Sustainability, vol. 8, no. 7, p. 633, 2016
work page 2016
-
[8]
Y . Lu, W. Pei, and K. Peng, “State of the art of automatic disassembly of weee and perspective towards intelligent recycling in the era of industry 4.0,”The International Journal of Advanced Manufacturing Technology, vol. 128, no. 7, pp. 2825–2843, 2023
work page 2023
-
[9]
Vision-based screw head detection for automated disassembly for remanufacturing,
S. Mangold, C. Steiner, M. Friedmann, and J. Fleischer, “Vision-based screw head detection for automated disassembly for remanufacturing,” Procedia CIRP, vol. 105, pp. 1–6, 2022
work page 2022
-
[10]
Automatic screw detection and tool recommendation system for robotic disassembly,
X. Zhang, K. Eltouny, X. Liang, and S. Behdad, “Automatic screw detection and tool recommendation system for robotic disassembly,” Journal of Manufacturing Science and Engineering, vol. 145, no. 3, p. 031008, 2023
work page 2023
-
[11]
A novel robotic grasp detection framework using low-cost rgb-d camera for industrial bin picking,
H. Sun, Z. Zhang, H. Wang, Y . Wang, and Q. Cao, “A novel robotic grasp detection framework using low-cost rgb-d camera for industrial bin picking,”IEEE Transactions on Instrumentation and Measurement, vol. 73, pp. 1–12, 2023
work page 2023
-
[12]
Deep robotic grasping prediction with hierarchical rgb-d fusion,
Y . Song, J. Wen, D. Liu, and C. Yu, “Deep robotic grasping prediction with hierarchical rgb-d fusion,”International Journal of Control, Automation and Systems, vol. 20, no. 1, pp. 243–254, 2022
work page 2022
-
[13]
V . Suresh, W. Liu, M. Zheng, and B. Li, “High-resolution structured light 3d vision for fine-scale characterization to assist robotic assem- bly,” inDimensional optical metrology and inspection for practical applications x, vol. 11732. SPIE, 2021, p. 1173203
work page 2021
-
[14]
H. Zhao, C. Liu, B. Balasubramaniam, J. Li, J. Song, X. Liang, M. Zheng, and B. Li, “Precision 3d profilometry of consumer-grade computer enclosures using high dynamic range fringe projection,” Applied Optics, vol. 64, no. 30, pp. 8986–8994, 2025
work page 2025
-
[15]
Robotic system for automated disassembly of electronic waste: Unscrewing,
I. D ´ıaz, D. Borro, O. Iparraguirre, M. Eizaguirre, F. A. Ricardo, N. Mu ˜noz, and J. J. Gil, “Robotic system for automated disassembly of electronic waste: Unscrewing,”Robotics and Computer-Integrated Manufacturing, vol. 95, p. 103032, 2025
work page 2025
-
[16]
Adaptive motion planning via contact-based intent inference for human-robot collaboration,
J. Song, X. Liang, and M. Zheng, “Adaptive motion planning via contact-based intent inference for human-robot collaboration,”arXiv preprint arXiv:2510.08811, 2025
-
[17]
Y . Wang, X. Wu, D. Mei, L. Zhu, and J. Chen, “Flexible tactile sensor array for distributed tactile sensing and slip detection in robotic hand grasping,”Sensors and Actuators A: Physical, vol. 297, p. 111512, 2019
work page 2019
-
[18]
V . R. Galaiya, “Improving robotic manipulation: techniques for object pose estimation, accommodating positional uncertainty, and disassem- bly tasks from examples,”arXiv preprint arXiv:2506.15865, 2025
-
[19]
S. Tian, X. Liang, and M. Zheng, “An optimization-based human behavior modeling and prediction for human-robot collaborative disas- sembly,” in2023 American Control Conference (ACC), 2023
work page 2023
-
[20]
S. Tian, M. Zheng, and X. Liang, “Real-time 3d motion prediction for human-robot collaboration via bayesian-optimized diffusion models,” IEEE Transactions on Automation Science and Engineering, 2025
work page 2025
-
[21]
Early prediction of human intention for human–robot collaboration using transformer network,
X. Zhang, S. Tian, X. Liang, M. Zheng, and S. Behdad, “Early prediction of human intention for human–robot collaboration using transformer network,”Journal of Computing and Information Science in Engineering, vol. 24, no. 5, p. 051003, 2024
work page 2024
-
[22]
Human- robot-interaction using cloud-based speech recognition systems,
C. Deuerlein, M. Langer, J. Seßner, P. Heß, and J. Franke, “Human- robot-interaction using cloud-based speech recognition systems,”Pro- cedia Cirp, vol. 97, pp. 130–135, 2021
work page 2021
-
[23]
P. Dong, S. Tian, S. Chen, Y . Li, S. Li, M. Zheng, and S. Yao, “Decoding silent speech cues from muscular biopotential signals for ef- ficient human-robot collaborations,”Advanced Materials Technologies, vol. 10, no. 4, p. 2400990, 2025
work page 2025
-
[24]
X. Wang, N. S. Grimaldi, S. Behdad, and B. Hu, “Evaluating the impact of collaborative robots in e-waste disassembly through emg-emg coher- ence analysis,” inProceedings of the Human Factors and Ergonomics Society Annual Meeting, vol. 68, no. 1. SAGE Publications Sage CA: Los Angeles, CA, 2024, pp. 677–682
work page 2024
-
[25]
Research on gesture recog- nition and interaction of virtual collaborative disassembly training,
Z. Hu, S. Sun, Y . Wu, H. Yan, and T. Zhu, “Research on gesture recog- nition and interaction of virtual collaborative disassembly training,” in 2021 IEEE 7th International Conference on Virtual Reality (ICVR). IEEE, 2021, pp. 246–253
work page 2021
-
[26]
Human–robot interac- tion and tracking system based on mixed reality disassembly tasks,
R. Calder ´on-Sesmero, A. Lozano-Hern ´andez, F. Frontela-Encinas, G. Cabezas-L ´opez, and M. De-Diego-Moro, “Human–robot interac- tion and tracking system based on mixed reality disassembly tasks,” Robotics, vol. 14, no. 8, p. 106, 2025
work page 2025
-
[27]
Z. He, Z. Wang, Y . Peng, P. Chang, H. Yang, and M. Chen, “Embodied intelligence in disassembly: Multimodal perception cross-valiation and continual learning in neuro-symbolic tamp,” in2025 IEEE 21st Inter- national Conference on Automation Science and Engineering (CASE). IEEE, 2025, pp. 1561–1568
work page 2025
-
[28]
C. Zhou, Y . Wu, W. Sterkens, M. Piessens, P. Vandewalle, and J. R. Peeters, “Towards robotic disassembly: A comparison of coarse-to- fine and multimodal fusion screw detection methods,”Journal of Manufacturing Systems, vol. 74, pp. 633–646, 2024
work page 2024
-
[29]
Automatic object detection for disassembly and recycling of electronic board components,
S. Puttero, A. Nassehi, E. Verna, G. Genta, and M. Galetto, “Automatic object detection for disassembly and recycling of electronic board components,”Procedia CIRP, vol. 127, pp. 206–211, 2024
work page 2024
-
[30]
Affordance detection of tool parts from geometric features,
A. Myers, C. L. Teo, C. Ferm ¨uller, and Y . Aloimonos, “Affordance detection of tool parts from geometric features,” in2015 IEEE inter- national conference on robotics and automation (ICRA). IEEE, 2015, pp. 1374–1381
work page 2015
-
[31]
Object affordance detection with boundary- preserving network for robotic manipulation tasks,
C. Yin and Q. Zhang, “Object affordance detection with boundary- preserving network for robotic manipulation tasks,”Neural Computing and Applications, vol. 34, no. 20, pp. 17 963–17 980, 2022
work page 2022
-
[32]
X. Zhang, C. Liu, X. Liang, M. Zheng, and S. Behdad, “Evaluating large and lightweight vision models for irregular component segmenta- tion in e-waste disassembly,”arXiv preprint arXiv:2603.27441, 2026
-
[33]
A disassembly scoring framework for human–robot collaboration based on robotic capabilities,
H.-Y . Liao, T. Pulikottil, J. R. Peeters, and S. Behdad, “A disassembly scoring framework for human–robot collaboration based on robotic capabilities,”Journal of Mechanical Design, vol. 147, no. 6, p. 062002, 2025
work page 2025
-
[34]
Graspsam: When segment anything model meets grasp detection,
S. Noh, J. Kim, D. Nam, S. Back, R. Kang, and K. Lee, “Graspsam: When segment anything model meets grasp detection,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 14 023–14 029
work page 2025
-
[35]
C. Wu, X. Bi, J. Pfrommer, A. Cebulla, S. Mangold, and J. Beyerer, “Sim2real transfer learning for point cloud segmentation: An industrial application case on autonomous disassembly,” inProceedings of the IEEE/CVF winter conference on applications of computer vision, 2023, pp. 4531–4540
work page 2023
-
[36]
Tax-pose: Task- specific cross-pose estimation for robot manipulation,
C. Pan, B. Okorn, H. Zhang, B. Eisner, and D. Held, “Tax-pose: Task- specific cross-pose estimation for robot manipulation,” inConference on Robot Learning. PMLR, 2023, pp. 1783–1792
work page 2023
-
[37]
J. Fan, P. Zheng, S. Li, and L. Wang, “An integrated hand-object dense pose estimation approach with explicit occlusion awareness for human- robot collaborative disassembly,”IEEE Transactions on Automation Science and Engineering, vol. 21, no. 1, pp. 147–156, 2024
work page 2024
-
[38]
Low cost three-dimensional virtual model construction for remanufacturing industry,
M. U. Siddiqi, W. L. Ijomah, G. I. Dobie, M. Hafeez, S. Gareth Pierce, W. Ion, C. Mineo, and C. N. MacLeod, “Low cost three-dimensional virtual model construction for remanufacturing industry,”Journal of Remanufacturing, vol. 9, no. 2, pp. 129–139, 2019
work page 2019
-
[39]
S. Tian, M. Zheng, and X. Liang, “Transfusion: A practical and effective transformer-based diffusion model for 3d human motion prediction,”IEEE Robotics and Automation Letters, vol. 9, no. 7, pp. 6232–6239, 2024
work page 2024
-
[40]
De-tgn: Uncertainty-aware human motion forecasting using deep ensembles,
K. A. Eltouny, W. Liu, S. Tian, M. Zheng, and X. Liang, “De-tgn: Uncertainty-aware human motion forecasting using deep ensembles,” IEEE Robotics and Automation Letters, vol. 9, no. 3, pp. 2192–2199, 2024
work page 2024
-
[41]
A recurrent neural network enhanced unscented kalman filter for human motion predic- tion,
W. Liu, S. Tian, B. Hu, X. Liang, and M. Zheng, “A recurrent neural network enhanced unscented kalman filter for human motion predic- tion,” inInternational Symposium on Flexible Automation, vol. 87882. American Society of Mechanical Engineers, 2024, p. V001T07A012
work page 2024
-
[42]
S. Tian, M. Zheng, and X. Liang, “Prediflow: A flow-based prediction- refinement framework for real-time human motion prediction in human- robot collaboration,”arXiv preprint arXiv:2512.13903, 2025
-
[43]
X. Zhang, S. Tian, X. Liang, M. Zheng, and S. Behdad, “Multi-task learning for intention and trajectory prediction in human–robot col- laborative disassembly tasks,”Journal of Computing and Information Science in Engineering, vol. 25, no. 5, p. 051002, 2025
work page 2025
-
[44]
Unsupervised human activity recognition learning for disassembly tasks,
X. Zhang, D. Yi, S. Behdad, and S. Saxena, “Unsupervised human activity recognition learning for disassembly tasks,”IEEE Transactions on Industrial Informatics, vol. 20, no. 1, pp. 785–794, 2023
work page 2023
-
[45]
J. Song, X. Liang, and M. Zheng, “Tatic: Task-aware temporal learning for human intent inference from physical corrections in human-robot collaboration,”arXiv preprint arXiv:2603.11077, 2026
-
[46]
T. Wang, Z. Gao, C. Li, G. Min, K. Xu, E. Zhao, K. Wang, and W. Tang, “Bioinspired textured sensor arrays with early temporal processing for ultrafast robotic tactile recognition,”Materials Science and Engineering: R: Reports, vol. 167, p. 101113, 2026
work page 2026
-
[47]
Ge- netically optimised disassembly sequence for automotive component reuse,
T. Go, D. Wahab, M. A. Rahman, R. Ramli, and A. Hussain, “Ge- netically optimised disassembly sequence for automotive component reuse,”Expert Systems with Applications, vol. 39, no. 5, pp. 5409– 5417, 2012
work page 2012
-
[48]
Disassembly sequence planning based on a genetic algorithm,
M. Kheder, M. Trigui, and N. Aifaoui, “Disassembly sequence planning based on a genetic algorithm,”Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, vol. 229, no. 12, pp. 2281–2290, 2015
work page 2015
-
[49]
I. Kucukkoc, “Balancing of two-sided disassembly lines: Problem definition, milp model and genetic algorithm approach,”Computers & Operations Research, vol. 124, p. 105064, 2020
work page 2020
-
[50]
G. Percoco and M. Diella, “Preliminary evaluation of artificial bee colony algorithm when applied to multi objective partial disassembly planning,”Research Journal of Applied Sciences, Engineering and Technology, vol. 6, no. 17, pp. 3234–3243, 2013
work page 2013
-
[51]
Robotic disassembly sequence planning using enhanced discrete bees algorithm in remanufacturing,
J. Liu, Z. Zhou, D. T. Pham, W. Xu, C. Ji, and Q. Liu, “Robotic disassembly sequence planning using enhanced discrete bees algorithm in remanufacturing,”International Journal of Production Research, vol. 56, no. 9, pp. 3134–3151, 2018
work page 2018
-
[52]
K. Wang, X. Li, L. Gao, P. Li, and J. W. Sutherland, “A discrete artificial bee colony algorithm for multiobjective disassembly line balancing of end-of-life products,”IEEE Transactions on Cybernetics, vol. 52, no. 8, pp. 7415–7426, 2021
work page 2021
-
[53]
J. Liu, Z. Zhou, D. T. Pham, W. Xu, C. Ji, and Q. Liu, “Collab- orative optimization of robotic disassembly sequence planning and robotic disassembly line balancing problem using improved discrete bees algorithm in remanufacturing,”Robotics and computer-integrated manufacturing, vol. 61, p. 101829, 2020
work page 2020
-
[54]
Artificial bee colony algorithm for solving sequence-dependent disassembly line balancing problem,
C. B. Kalayci and S. M. Gupta, “Artificial bee colony algorithm for solving sequence-dependent disassembly line balancing problem,” Expert Systems with Applications, vol. 40, no. 18, pp. 7231–7241, 2013
work page 2013
-
[55]
Z. A. C ¸ il, D. Kizilay, Z. Li, and H.¨Oztop, “Two-sided disassembly line balancing problem with sequence-dependent setup time: A constraint programming model and artificial bee colony algorithm,”Expert Sys- tems with Applications, vol. 203, p. 117529, 2022
work page 2022
-
[56]
Y . Luo, Q. Peng, and P. Gu, “Integrated multi-layer representation and ant colony search for product selective disassembly planning,” Computers in Industry, vol. 75, pp. 13–26, 2016
work page 2016
-
[57]
Performance comparison between ant algorithm and mod- ified ant algorithm,
S. Malik, “Performance comparison between ant algorithm and mod- ified ant algorithm,”International Journal of Advanced Computer Science and Applications, vol. 1, no. 4, 2010
work page 2010
-
[58]
Simplified swarm optimization in disassembly sequencing problems with learning effects,
W.-C. Yeh, “Simplified swarm optimization in disassembly sequencing problems with learning effects,”Computers & Operations Research, vol. 39, no. 9, pp. 2168–2177, 2012
work page 2012
-
[59]
C. B. Kalayci and S. M. Gupta, “A particle swarm optimization algorithm with neighborhood-based mutation for sequence-dependent disassembly line balancing problem,”The International Journal of Advanced Manufacturing Technology, vol. 69, no. 1, pp. 197–209, 2013
work page 2013
-
[60]
X. Guo, S. Liu, M. Zhou, and G. Tian, “Dual-objective program and scatter search for the optimization of disassembly sequences subject to multiresource constraints,”IEEE Transactions on Automation Science and Engineering, vol. 15, no. 3, pp. 1091–1103, 2017
work page 2017
-
[61]
W. Li, K. Xia, L. Gao, and K.-M. Chao, “Selective disassembly planning for waste electrical and electronic equipment with case studies on liquid crystaldisplays,”Robotics and Computer-Integrated Manufacturing, vol. 29, no. 4, pp. 248–260, 2013
work page 2013
-
[62]
X. Guo, M. Zhou, S. Liu, and L. Qi, “Lexicographic multiobjective scatter search for the optimization of sequence-dependent selective disassembly subject to multiresource constraints,”IEEE Transactions on Cybernetics, vol. 50, no. 7, pp. 3307–3317, 2019
work page 2019
-
[63]
Task allocation and planning for product disassembly with human–robot collaboration,
M.-L. Lee, S. Behdad, X. Liang, and M. Zheng, “Task allocation and planning for product disassembly with human–robot collaboration,” Robotics and Computer-Integrated Manufacturing, vol. 76, p. 102306, 2022
work page 2022
-
[64]
T. Yin, Z. Zhang, Y . Zhang, T. Wu, and W. Liang, “Mixed-integer programming model and hybrid driving algorithm for multi-product partial disassembly line balancing problem with multi-robot worksta- tions,”Robotics and Computer-Integrated Manufacturing, vol. 73, p. 102251, 2022
work page 2022
-
[65]
Y .-S. Ma, H.-B. Jun, H.-W. Kim, and D.-H. Lee, “Disassembly process planning algorithms for end-of-life product recovery and environmen- tally conscious disposal,”International journal of production research, vol. 49, no. 23, pp. 7007–7027, 2011
work page 2011
-
[66]
H.-W. Kim and D.-H. Lee, “An optimal algorithm for selective dis- assembly sequencing with sequence-dependent set-ups in parallel dis- assembly environment,”International Journal of Production Research, vol. 55, no. 24, pp. 7317–7333, 2017
work page 2017
-
[67]
Y . Zhang, Z. Zhang, C. Guan, and P. Xu, “Improved whale optimisation algorithm for two-sided disassembly line balancing problems consid- ering part characteristic indexes,”International Journal of Production Research, vol. 60, no. 8, pp. 2553–2571, 2022
work page 2022
-
[68]
Disassembly process planning trade- offs for product maintenance,
S. Behdad and D. Thurston, “Disassembly process planning trade- offs for product maintenance,” inInternational Design Engineering Technical Conferences and Computers and Information in Engineering Conference, vol. 44144, 2010, pp. 427–434
work page 2010
-
[69]
Waste electronics and electrical equipment disassembly and recycling using petri net analysis,
T. C. Kuo and M.-L. Wang, “Waste electronics and electrical equipment disassembly and recycling using petri net analysis,” inThe 40th Inter- national Conference on Computers & Indutrial Engineering. IEEE, 2010, pp. 1–6
work page 2010
-
[70]
Disassembly and reassembly sequence planning tradeoffs under uncertainty for product maintenance,
S. Behdad and D. Thurston, “Disassembly and reassembly sequence planning tradeoffs under uncertainty for product maintenance,”Journal of Mechanical Design, vol. 134, no. 4, p. 041011, 04 2012
work page 2012
-
[71]
S. Smith, G. Smith, and W.-H. Chen, “Disassembly sequence structure graphs: An optimal approach for multiple-target selective disassembly sequence planning,”Advanced engineering informatics, vol. 26, no. 2, pp. 306–316, 2012
work page 2012
-
[72]
Mechanical product disassembly and/or graph construction,
S.-s. Min, X.-j. Zhu, and X. Zhu, “Mechanical product disassembly and/or graph construction,” in2010 international conference on mea- suring technology and mechatronics automation, vol. 2. IEEE, 2010, pp. 627–631
work page 2010
-
[73]
S. M ¨unker and R. H. Schmitt, “Cad-based and/or graph generation algorithms in (dis) assembly sequence planning of complex products,” Procedia CIRP, vol. 106, pp. 144–149, 2022
work page 2022
-
[74]
S.-e. Zhao, Y .-l. Li, R. Fu, and W. Yuan, “Fuzzy reasoning petri nets and its application to disassembly sequence decision-making for the end- of-life product recycling and remanufacturing,”International Journal of Computer Integrated Manufacturing, vol. 27, no. 5, pp. 415–421, 2014
work page 2014
-
[75]
T. C. Kuo, “Waste electronics and electrical equipment disassembly and recycling using petri net analysis: Considering the economic value and environmental impacts,”Computers & Industrial Engineering, vol. 65, no. 1, pp. 54–64, 2013
work page 2013
-
[76]
X. Guo, S. Liu, M. Zhou, and G. Tian, “Disassembly sequence optimization for large-scale products with multiresource constraints using scatter search and petri nets,”IEEE transactions on cybernetics, vol. 46, no. 11, pp. 2435–2446, 2015
work page 2015
-
[77]
A data-driven method of se- lective disassembly planning at end-of-life under uncertainty,
Y . Gao, S. Lou, H. Zheng, and J. Tan, “A data-driven method of se- lective disassembly planning at end-of-life under uncertainty,”Journal of Intelligent Manufacturing, vol. 34, no. 2, pp. 565–585, 2023
work page 2023
-
[78]
L. Streibel, P. Jordan, and M. F. Zaeh, “Data-driven approach for decision-making in reactive disassembly planning to enable case-based reasoning,”Procedia CIRP, vol. 130, pp. 1117–1123, 2024
work page 2024
-
[79]
X. Zhao, C. Li, Y . Tang, and J. Cui, “Reinforcement learning-based selective disassembly sequence planning for the end-of-life products with structure uncertainty,”IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7807–7814, 2021
work page 2021
-
[80]
Reinforcement learning for disassembly sequence plan- ning optimization,
A. Allagui, I. Belhadj, R. Plateaux, M. Hammadi, O. Penas, and N. Aifaoui, “Reinforcement learning for disassembly sequence plan- ning optimization,”Computers in Industry, vol. 151, p. 103992, 2023
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.