Robust mathcal{H}_infty Observer Design via Finsler's Lemma and IQCs
Pith reviewed 2026-05-13 17:28 UTC · model grok-4.3
The pith
A slack variable via Finsler's lemma relaxes the LMI for robust H∞ observer design with IQCs, removing the strict stability requirement and multiplier trade-off.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
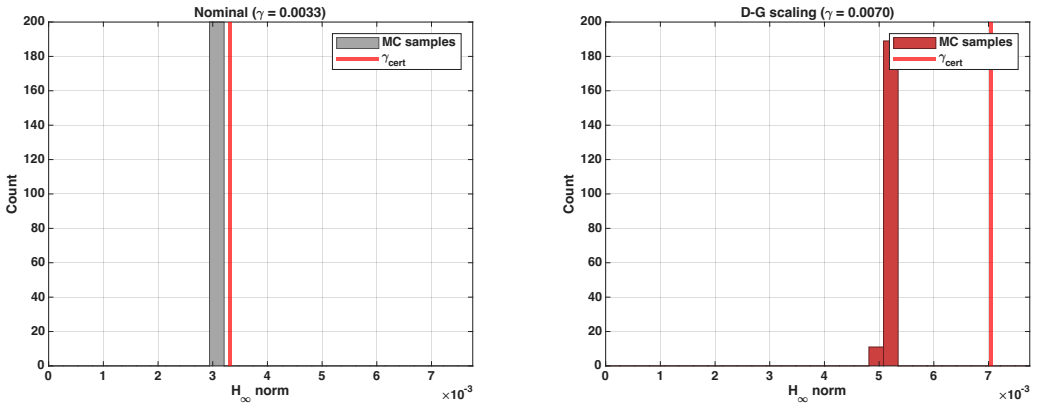
By applying Finsler's lemma to introduce a slack variable, the authors obtain an LMI for the observer gain matrix that does not enforce the block-diagonal structure required by standard Lyapunov-IQC products. The resulting condition certifies an upper bound on the H∞ norm of the estimation error for plants whose uncertainties are described by IQCs, remains feasible for marginally stable open-loop dynamics when artificial damping is added during design, and avoids the infeasibility that occurs when the Lyapunov matrix and IQC multiplier must trade off against each other over large uncertainty sets.
What carries the argument
The slack variable introduced through Finsler's lemma that relaxes the coupling between the Lyapunov matrix, observer gain, and IQC multiplier inside the LMI.
If this is right
- Robust observers become computable for plants whose nominal dynamics are only marginally stable.
- Larger ranges of uncertainty parameters become feasible without the LMI becoming infeasible.
- Performance guarantees can be obtained directly from IQC descriptions without requiring strict stability of the error system.
- The same LMI structure applies to quaternion attitude estimation and to mechanical systems with uncertain parameters.
Where Pith is reading between the lines
- The artificial damping parameter may function as a practical tuning knob that trades certified bound tightness against actual performance on the real plant.
- Analogous slack-variable relaxations could be applied to other robust synthesis problems that combine IQCs with Lyapunov analysis.
- Numerical verification on the undamped system with sampled uncertainties would directly test how much of the certified performance carries over to hardware.
Load-bearing premise
Adding artificial damping to the design model for marginally stable dynamics yields an observer whose certified H∞ performance bound remains meaningful when the observer is applied to the actual undamped plant.
What would settle it
Apply the observer computed from the damped design model to the original undamped plant under the full uncertainty set and check whether the realized H∞ norm of the estimation error exceeds the certified bound obtained from the LMI.
Figures




read the original abstract
This paper develops a Finsler-based LMI for robust $\mathcal{H}_\infty$ observer design with integral quadratic constraints (IQCs) and block-structured uncertainty. By introducing a slack variable that relaxes the coupling between the Lyapunov matrix, the observer gain, and the IQC multiplier, the formulation addresses two limitations of the standard block-diagonal approach: the LMI requirement $\mathrm{He}(PA) \prec 0$ (which fails for marginally stable dynamics), and a multiplier--Lyapunov trade-off that causes infeasibility for wide uncertainty ranges. For marginally stable dynamics, artificial damping in the design model balances certified versus actual performance. The framework is demonstrated on quaternion attitude estimation with angular velocity uncertainty and mass-spring-damper state estimation with uncertain physical parameters.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops an LMI-based robust H∞ observer design method for linear systems subject to block-structured uncertainty described by IQCs. By applying Finsler's lemma, a slack variable is introduced to decouple the Lyapunov matrix P, the observer gain L, and the IQC multiplier, thereby removing the explicit He(PA) ≺ 0 constraint that precludes marginally stable plants and mitigating the multiplier-Lyapunov trade-off that causes infeasibility for large uncertainty sets. For marginally stable dynamics the synthesis model is augmented with artificial damping; the resulting observer is then implemented on the original plant. The approach is illustrated on quaternion attitude estimation with angular-velocity uncertainty and on mass-spring-damper state estimation with uncertain physical parameters.
Significance. If the central LMI construction is correct and the artificial-damping step preserves meaningful performance certificates, the method would enlarge the class of systems for which robust observers can be designed via convex optimization. The two numerical examples indicate practical relevance in aerospace and mechanical applications. The use of Finsler's lemma to obtain a genuinely less conservative LMI is a concrete technical contribution that could be adopted in related robust-control settings.
major comments (2)
- [§4] §4 (artificial-damping subsection): the claim that the H∞ bound certified on the artificially damped error system remains informative for the undamped plant is not supported by any sensitivity result, continuity modulus, or table that quantifies how the certified γ varies with the damping coefficient. Without such a quantitative mapping the practical utility of the relaxation rests on an uncharacterized assumption.
- [Theorem 1] Theorem 1 / LMI (3): the derivation that the slack-variable LMI implies the desired H∞ performance for the closed-loop error system is only sketched; the manuscript supplies neither the full algebraic steps nor the numerical LMI data (feasibility margins, achieved γ values) needed to verify that the claimed feasibility improvements are actually realized.
minor comments (2)
- [Abstract] The abstract states that artificial damping 'balances certified versus actual performance' but gives no numerical illustration of the trade-off; a short table or plot in the examples section would clarify the statement.
- [§2] Notation for the IQC multiplier and the block-structured uncertainty set is introduced without an explicit reference to the standard definition (e.g., the precise form of the IQC in Eq. (2)); a one-sentence reminder would improve readability.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. The comments highlight important points regarding the presentation of the artificial-damping technique and the completeness of the proof for Theorem 1. We address each major comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [§4] §4 (artificial-damping subsection): the claim that the H∞ bound certified on the artificially damped error system remains informative for the undamped plant is not supported by any sensitivity result, continuity modulus, or table that quantifies how the certified γ varies with the damping coefficient. Without such a quantitative mapping the practical utility of the relaxation rests on an uncharacterized assumption.
Authors: We agree that a quantitative characterization of the effect of the artificial damping coefficient would strengthen the manuscript. In the revised version we will add to §4 a short sensitivity analysis together with a table that reports the certified γ for a range of damping values on the mass-spring-damper example. We will also include a brief continuity remark noting that the closed-loop matrices depend continuously on the damping parameter, so that the LMI solution (when feasible) varies continuously with it. revision: yes
-
Referee: [Theorem 1] Theorem 1 / LMI (3): the derivation that the slack-variable LMI implies the desired H∞ performance for the closed-loop error system is only sketched; the manuscript supplies neither the full algebraic steps nor the numerical LMI data (feasibility margins, achieved γ values) needed to verify that the claimed feasibility improvements are actually realized.
Authors: We acknowledge that the proof of Theorem 1 is presented only as a sketch. In the revision we will move the complete algebraic derivation to an appendix, spelling out each step from the application of Finsler’s lemma to the final LMI. We will also augment the numerical-examples section with the concrete feasibility margins and the achieved γ values obtained by both the proposed LMI and the standard block-diagonal formulation, thereby allowing direct verification of the reported improvements. revision: yes
Circularity Check
No significant circularity; derivation remains self-contained
full rationale
The paper applies Finsler's lemma to introduce a slack variable that decouples the Lyapunov matrix P, observer gain L, and IQC multiplier in the LMI formulation. This directly relaxes the He(PA) ≺ 0 constraint without redefining the performance bound γ in terms of fitted parameters or prior self-citations. Artificial damping is introduced as an explicit design choice for marginally stable plants, presented as a practical balance rather than a derived equality that reduces the certified bound to the damping term itself. No load-bearing step equates the final H∞ guarantee to an input by construction, and the framework relies on standard external LMI and IQC machinery. This yields a normal non-circular outcome.
Axiom & Free-Parameter Ledger
free parameters (1)
- artificial damping coefficient
axioms (1)
- domain assumption Existence of a quadratic Lyapunov function and valid IQC multipliers for the given uncertainty structure
Lean theorems connected to this paper
-
Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
By introducing a slack variable that relaxes the coupling between the Lyapunov matrix, the observer gain, and the IQC multiplier... Finsler-based LMI (Theorem 1)
-
Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
For marginally stable dynamics, artificial damping in the design model balances certified versus actual performance
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
System analysis via integral quadratic constraints,
A. Megretski and A. Rantzer, “System analysis via integral quadratic constraints,”IEEE Transactions on Automatic Control, vol. 42, no. 6, pp. 819–830, 1997
work page 1997
-
[2]
Filtering and smoothing in anH ∞ setting,
K. M. Nagpal and P. P. Khargonekar, “Filtering and smoothing in anH ∞ setting,”IEEE Transactions on Automatic Control, vol. 36, no. 2, pp. 152–166, 1991
work page 1991
-
[3]
H ∞ estimation for discrete-time linear uncertain systems,
L. Xie, C. E. de Souza, and M. Fu, “H ∞ estimation for discrete-time linear uncertain systems,”International Journal of Robust and Nonlinear Control, vol. 1, no. 2, pp. 111–123, 1991
work page 1991
-
[4]
LPV control and full block multipliers,
C. W. Scherer, “LPV control and full block multipliers,”Automatica, vol. 37, no. 3, pp. 361–375, 2001
work page 2001
-
[5]
IQC-synthesis with general dynamic multipliers,
J. Veenman and C. W. Scherer, “IQC-synthesis with general dynamic multipliers,”International Journal of Robust and Nonlinear Control, vol. 24, no. 17, pp. 3027–3056, 2014
work page 2014
-
[6]
Multiobjective output-feedback control via LMI optimization,
C. Scherer, P. Gahinet, and M. Chilali, “Multiobjective output-feedback control via LMI optimization,”IEEE Transactions on Automatic Control, vol. 42, no. 7, pp. 896–911, 1997
work page 1997
-
[7]
G.-R. Duan and H.-H. Yu,LMIs in Control Systems: Analysis, Design and Applications. CRC Press, 2013
work page 2013
-
[8]
A new discrete-time robust stability condition,
M. C. de Oliveira, J. Bernussou, and J. C. Geromel, “A new discrete-time robust stability condition,”Systems & Control Letters, vol. 37, no. 4, pp. 261–265, 1999
work page 1999
-
[9]
Extended LMI characterizations for stability and performance of linear systems,
G. Pipeleers, B. Demeulenaere, J. Swevers, and L. Vandenberghe, “Extended LMI characterizations for stability and performance of linear systems,” Systems & Control Letters, vol. 58, no. 7, pp. 510–518, 2009
work page 2009
-
[10]
Über das Vorkommen definiter und semidefiniter Formen in Scharen quadratischer Formen,
P. Finsler, “Über das Vorkommen definiter und semidefiniter Formen in Scharen quadratischer Formen,”Commentarii Mathematici Helvetici, vol. 9, pp. 188–192, 1937
work page 1937
-
[11]
Stability tests for constrained linear systems,
M. C. de Oliveira and R. E. Skelton, “Stability tests for constrained linear systems,”Perspectives in Robust Control, pp. 241–257, 2001
work page 2001
-
[12]
R. E. Skelton, T. Iwasaki, and K. M. Grigoriadis,A Unified Algebraic Approach to Linear Control Design. Taylor & Francis, 1998
work page 1998
-
[13]
Robustness analysis of linear parameter varying systems using integral quadratic constraints,
H. Pfifer and P. Seiler, “Robustness analysis of linear parameter varying systems using integral quadratic constraints,”International Journal of Robust and Nonlinear Control, vol. 25, no. 15, pp. 2843–2864, 2015
work page 2015
-
[14]
Simplifying theH ∞ theory via loop-shifting, matrix-pencil and descriptor concepts,
M. G. Safonov, D. J. N. Limebeer, and R. Y . Chiang, “Simplifying theH ∞ theory via loop-shifting, matrix-pencil and descriptor concepts,”International Journal of Control, vol. 50, no. 6, pp. 2467–2488, 1989
work page 1989
-
[15]
Continuous-time norm-constrained Kalman filtering,
J. R. Forbes, A. H. J. de Ruiter, and D. E. Zlotnik, “Continuous-time norm-constrained Kalman filtering,”Automatica, vol. 50, no. 10, pp. 2546–2554, 2014
work page 2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.