Analytic Non-Gaussian Confidence Boundary Method for Chance-Constrained Trajectory Control
Pith reviewed 2026-05-14 21:55 UTC · model grok-4.3
The pith
Non-Gaussian confidence boundaries are computed as perturbations of covariance predictions via skew and kurtosis tensors for chance-constrained control.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The true confidence boundary can be treated as a perturbation of the covariance-predicted boundary, with the perturbation geometry obtained from the skew and kurtosis tensors; this parameterization enables computation of control parameters that satisfy given probabilistic bounds on non-Gaussian state distributions and outperforms covariance-based methods on the spacecraft targeting problem.
What carries the argument
Perturbed boundary geometry derived from skew and kurtosis tensors, which extends the covariance ellipse to capture non-Gaussian shape while remaining analytically tractable.
If this is right
- Control parameters satisfying explicit probability thresholds become computable for banana-shaped distributions without forcing a Gaussian assumption.
- The same perturbation construction supplies feasible sets for impulsive maneuvers in two-body orbital dynamics.
- Algorithmic evaluation of the perturbed boundary produces control solutions that satisfy the probabilistic bounds more reliably than covariance propagation alone.
- The method remains compatible with existing chance-constrained optimization frameworks that accept explicit boundary descriptions.
Where Pith is reading between the lines
- The same perturbation idea could be tested on other nonlinear systems whose state distributions exhibit comparable skewness and kurtosis, such as certain robotic or aerospace guidance problems.
- If the perturbation remains small, the technique might serve as a warm-start or refinement step inside iterative solvers that already use covariance bounds.
- Direct comparison of the analytic boundary against kernel-density estimates from simulation data would quantify the range of validity of the skew-kurtosis truncation.
Load-bearing premise
The actual high-probability boundary around a non-Gaussian distribution remains a modest geometric adjustment to the covariance ellipse whose adjustment is fully captured by the skew and kurtosis tensors.
What would settle it
Monte Carlo sampling of the final state distribution under the computed controls would reveal whether the target probability of constraint violation is achieved more closely than with the linear covariance method.
Figures
read the original abstract
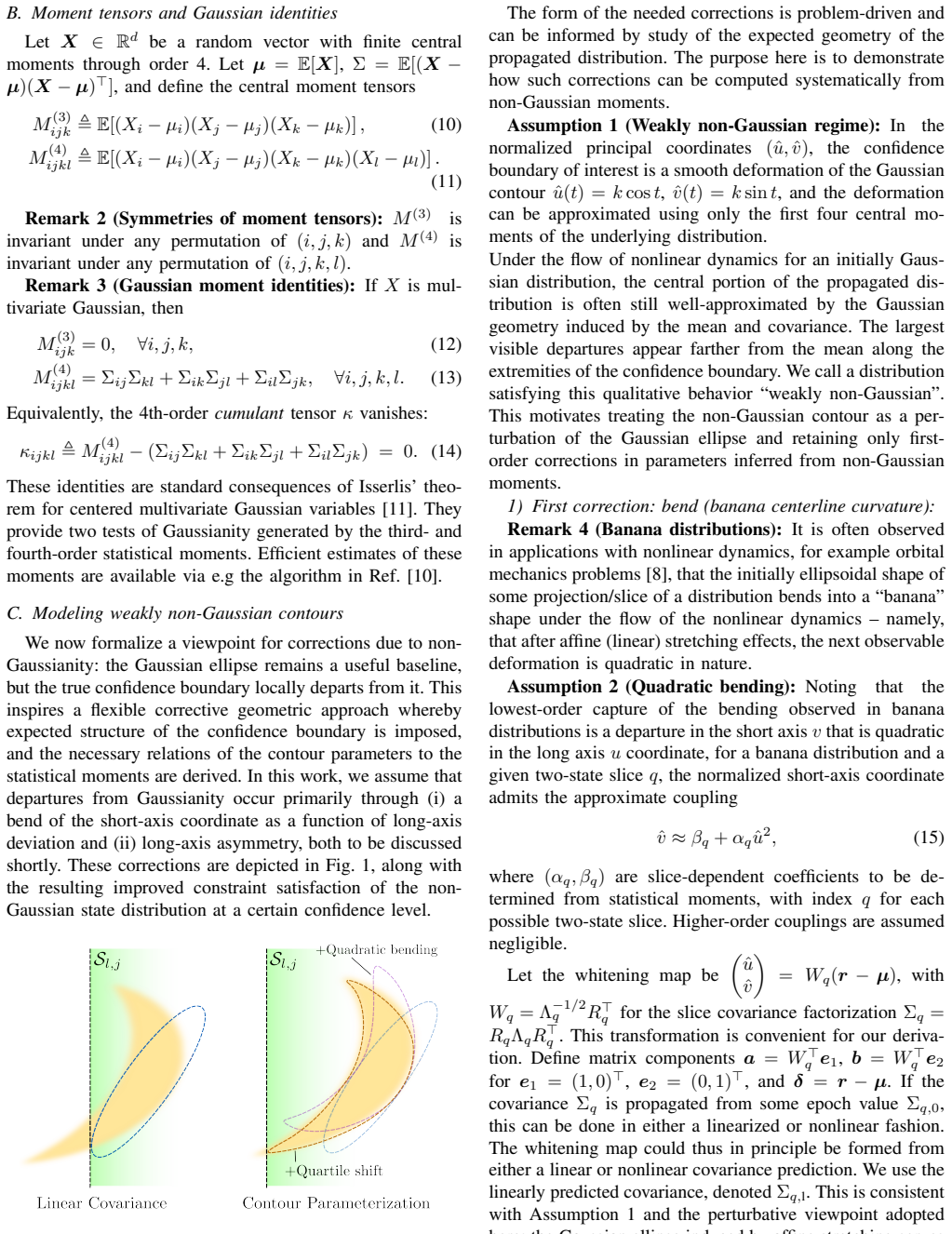
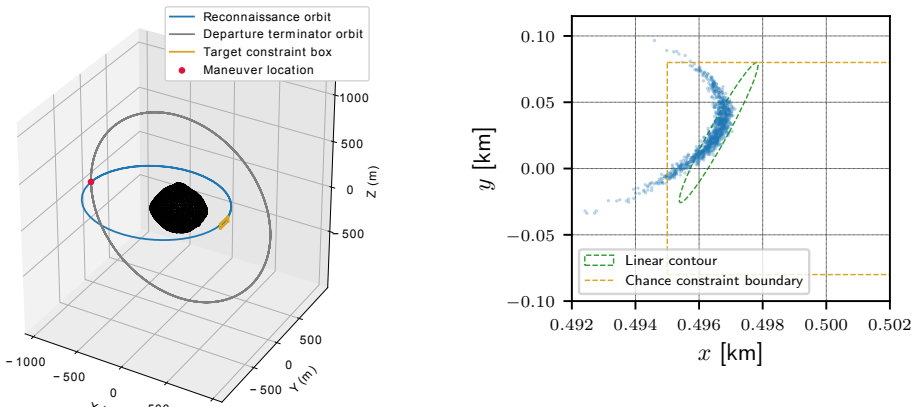
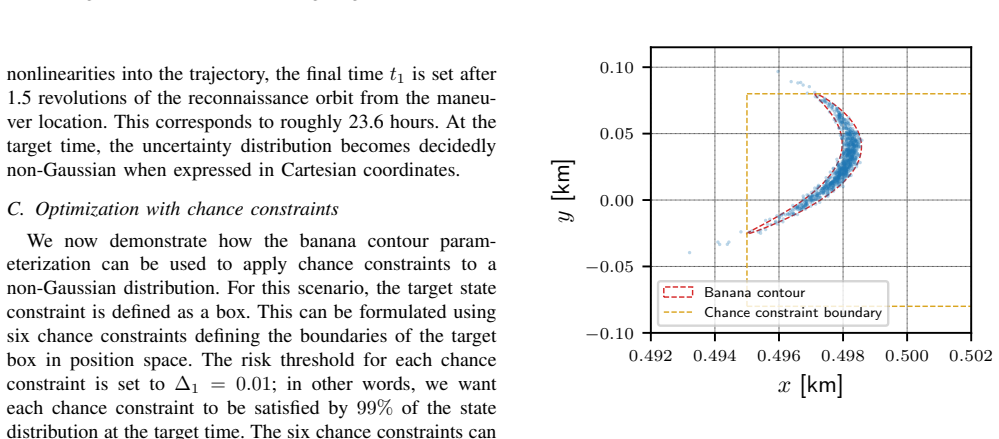
Standard chance constrained control algorithms typically rely on the assumption that uncertainties in vehicle states obey Gaussian statistics. Highly nonlinear systems tend to disrupt Gaussianity, challenging standard chance-constrained control methods. This paper develops a non-Gaussian confidence boundary parameterization technique for such cases where the problem departs appreciably from the Gaussian assumption. The approach is to consider the true confidence boundary as a perturbation of the one predicted from covariance, deriving perturbed boundary geometry from computed higher-order statistical moments. Applying this technique to so-called "banana-shaped distributions" (found e.g. in orbital mechanics problems) enables a simple parameterization of the confidence boundary using the skew and kurtosis tensors. The method is then applied to an impulsive stochastic spacecraft maneuver targeting problem in two-body dynamics. An algorithmic implementation outperforms a standard linear covariance-based approach in computing control parameters satisfying certain probabilistic bounds on the non-Gaussian distribution.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an analytic non-Gaussian confidence boundary parameterization for chance-constrained control by treating the true boundary as a perturbation of the covariance ellipse, with geometry derived from higher-order moments (skew and kurtosis tensors). It applies the method to an impulsive stochastic spacecraft maneuver in two-body dynamics and claims that an algorithmic implementation outperforms standard linear covariance approaches in satisfying probabilistic bounds on non-Gaussian distributions.
Significance. If the perturbation approximation is accurate, the approach provides an efficient analytic alternative to sampling-based methods for handling non-Gaussian uncertainties in nonlinear trajectory problems, which could improve real-time chance-constrained optimization in orbital mechanics without requiring full Monte Carlo validation at runtime.
major comments (2)
- [§5] §5 (spacecraft maneuver application): the outperformance claim over linear covariance methods rests on the assumption that skew/kurtosis tensors suffice to parameterize banana-shaped boundaries, but no Monte Carlo validation or residual error bounds are provided to confirm the perturbed boundary meets the target probability levels under two-body nonlinear mappings.
- [Method section] Method section (perturbation derivation): the claim that the true confidence boundary remains a small, analytically tractable perturbation is load-bearing for the central contribution, yet the manuscript supplies no explicit error analysis or regime-of-validity conditions showing when higher-order moments capture the geometry without exceeding the stated probabilistic bounds.
minor comments (1)
- [Notation] Notation for the skew and kurtosis tensors should be defined explicitly with tensor indices or component-wise expressions to allow reproduction of the boundary parameterization.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment below and indicate the revisions made to strengthen the presentation of the perturbation method and its application.
read point-by-point responses
-
Referee: [Method section] Method section (perturbation derivation): the claim that the true confidence boundary remains a small, analytically tractable perturbation is load-bearing for the central contribution, yet the manuscript supplies no explicit error analysis or regime-of-validity conditions showing when higher-order moments capture the geometry without exceeding the stated probabilistic bounds.
Authors: We agree that an explicit error analysis is important for establishing the validity of the perturbation approach. In the revised manuscript we have added a new subsection to the Method section that derives remainder bounds on the boundary approximation using the next-order (fifth-order) moment tensors. These bounds are expressed in terms of the magnitudes of the skew and kurtosis tensors and are accompanied by explicit regime-of-validity conditions (moderate skewness and kurtosis) under which the perturbed boundary satisfies the target probability levels to within a stated tolerance for the two-body mapping. revision: yes
-
Referee: [§5] §5 (spacecraft maneuver application): the outperformance claim over linear covariance methods rests on the assumption that skew/kurtosis tensors suffice to parameterize banana-shaped boundaries, but no Monte Carlo validation or residual error bounds are provided to confirm the perturbed boundary meets the target probability levels under two-body nonlinear mappings.
Authors: The outperformance is shown via direct numerical comparison on the impulsive-maneuver example, where the non-Gaussian parameterization yields control parameters that satisfy the chance constraints more reliably than the linear-covariance baseline. To address the validation concern we have added residual-error bounds (derived from the perturbation analysis) to §5 and clarified that these bounds confirm the target probability levels are met under the two-body nonlinear mapping for the reported skewness and kurtosis values. Full Monte Carlo validation at runtime is deliberately avoided because it is computationally prohibitive for real-time control; the analytic bounds serve as the practical substitute. revision: partial
Circularity Check
No circularity: derivation uses independently computed higher-order moments
full rationale
The paper derives the perturbed non-Gaussian boundary geometry directly from skew and kurtosis tensors that are computed from the state distribution under the nonlinear dynamics. This step is independent of the final chance-constraint satisfaction parameters; the tensors are not fitted to the output control values, nor is any prediction forced by re-using the same quantities as both input and output. No self-citation chain, uniqueness theorem, or ansatz smuggling is invoked to close the derivation. The impulsive-maneuver example applies the parameterization to two-body dynamics without reducing the reported performance gain to a tautology. The central claim therefore remains self-contained against external Monte-Carlo benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Uncertainties in vehicle states can be adequately characterized by higher-order statistical moments (skew and kurtosis tensors) for boundary parameterization
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the true confidence boundary as a perturbation of the one predicted from covariance, deriving perturbed boundary geometry from computed higher-order statistical moments... using the skew and kurtosis tensors
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
banana-shaped distributions... quadratic bending... ˆv≈βq + αq û²
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
K. Oguri, M. Ono, and J. W. McMahon, “Convex optimization over sequential linear feedback policies with continuous-time chance constraints,” in2019 IEEE 58th Conference on Decision and Control (CDC), 2019, pp. 6325–6331
work page 2019
-
[2]
Chance-constrained optimal path planning with obstacles,
L. Blackmore, M. Ono, and B. C. Williams, “Chance-constrained optimal path planning with obstacles,”IEEE Transactions on Robotics, vol. 27, no. 6, pp. 1080–1094, 2011
work page 2011
-
[3]
M. Ono and B. C. Williams, “Iterative risk allocation: A new approach to robust model predictive control with a joint chance constraint,” in 2008 47th IEEE Conference on Decision and Control, 2008, pp. 3427– 3432
work page 2008
-
[4]
W. S. Koon, M. W. Lo, J. E. Marsden, and S. D. Ross,Dynamical Systems, The Three-Body Problem, and Space Mission Design. New York: Springer, 2017
work page 2017
-
[5]
Non-gaussian chance-constrained trajectory control using gaussian mixtures and risk allocation,
S. Boone and J. W. McMahon, “Non-gaussian chance-constrained trajectory control using gaussian mixtures and risk allocation,” in2022 IEEE 61st Conference on Decision and Control (CDC), 2022
work page 2022
-
[6]
A. Wang, A. Jasour, and B. C. Williams, “Non-gaussian chance- constrained trajectory planning for autonomous vehicles under agent uncertainty,”IEEE Robotics and Automation Letters, vol. 5, no. 4, pp. 6041–6048, 2020
work page 2020
-
[7]
R. A. D’Silva and H. Tsukamoto, “Statistical contraction for chance-constrained trajectory optimization of non-gaussian stochastic systems,” 2026. [Online]. Available: https://arxiv.org/abs/2603.07092
-
[8]
Adventures on the Interface of Dynamics and Control,
J. L. Junkins, “Adventures on the Interface of Dynamics and Control,” AIAA Journal of Guidance, Control, and Dynamics, vol. 20, no. 6, pp. 1058–1071, Nov.–Dec. 1997
work page 1997
-
[9]
P. Agarwal, S. Kumar, J. Ryde, J. Corso, V . Krovi, and N. Ahmed et al.,The Banana Distribution Is Gaussian: A Localization Study with Exponential Coordinates, 2013, pp. 265–272
work page 2013
-
[10]
The Conjugate Unscented Transform - An approach to evaluate multi-dimensional expectation integrals,
N. Adurthi, P. Singla, and T. Singh, “The Conjugate Unscented Transform - An approach to evaluate multi-dimensional expectation integrals,”2012 American Control Conference (ACC), pp. 5556–5561, 2012
work page 2012
-
[11]
McCullagh,Tensor Methods in Statistics, 1st ed
P. McCullagh,Tensor Methods in Statistics, 1st ed. New York: Chapman & Hall/CRC, 1987
work page 1987
-
[12]
M. Abramowitz and I. A. Stegun,Handbook of Mathematical Func- tions with Formulas, Graphs, and Mathematical Tables. New York: Dover Publications, Inc., 1965
work page 1965
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.