Recognition: no theorem link
LoMa: Local Feature Matching Revisited
Pith reviewed 2026-05-10 18:48 UTC · model grok-4.3
The pith
Scaling data mixtures, model capacity, and compute revives progress in local feature matching on hard image pairs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
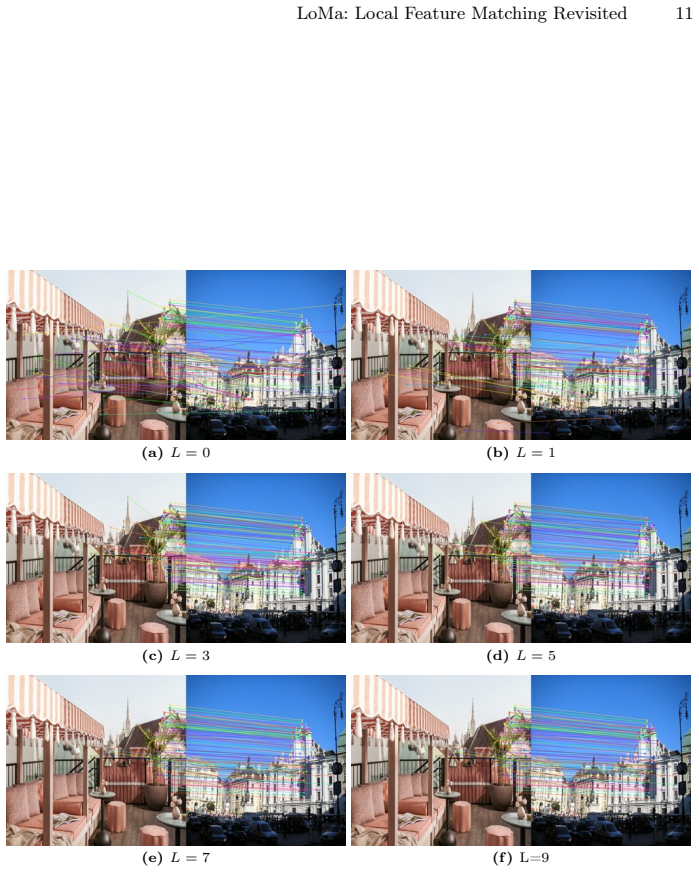
Local feature matching models benefit from the same kind of scaling that has driven advances elsewhere: large and diverse data mixtures combined with increased model capacity and compute yield substantially stronger matching accuracy, demonstrated across both established benchmarks and a new collection of hard image pairs.
What carries the argument
The LoMa training recipe that scales data diversity, model capacity, and compute for local feature descriptors and matchers.
If this is right
- Local feature matching becomes more reliable on image pairs that lie outside the distribution of successful 3D reconstructions.
- Standard benchmarks for wide-baseline stereo, indoor localization, and image matching register higher accuracy once models are scaled.
- Released models and code allow direct integration into existing Structure-from-Motion systems.
- Evaluation of future matching methods will need to include explicitly hard pairs rather than only easy reconstruction-derived ones.
Where Pith is reading between the lines
- The same scaling recipe could be tested on related low-level tasks such as keypoint detection or descriptor learning to check for similar lifts.
- End-to-end runs of full SfM pipelines using LoMa would reveal whether the isolated matching gains translate into measurably better 3D models.
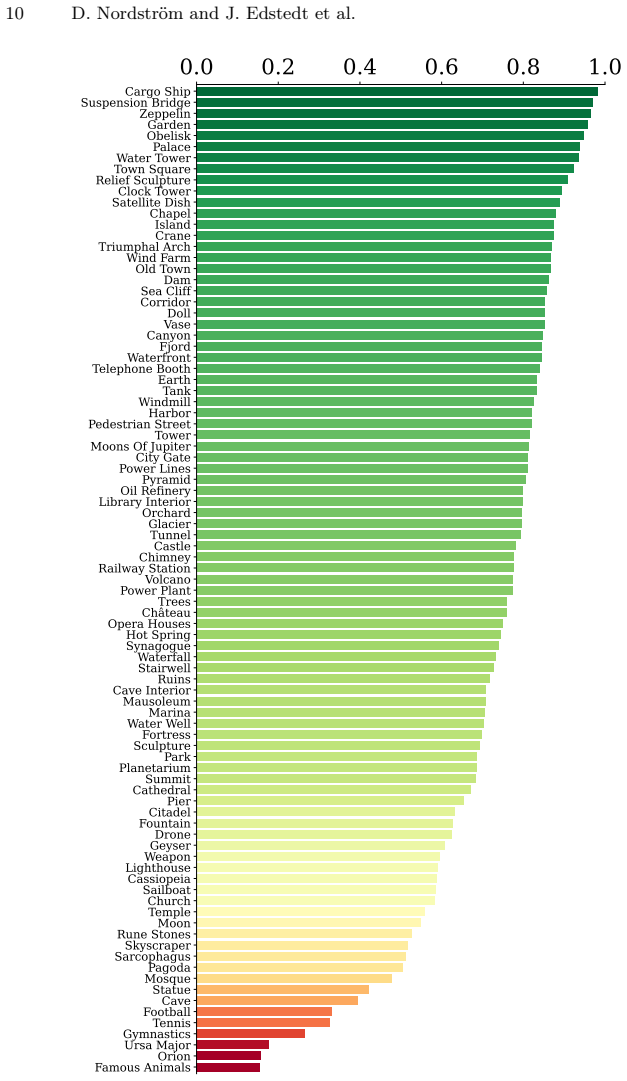
- The manual annotation approach used for HardMatch could be extended to create larger, publicly shared hard-pair collections for other vision domains.
Load-bearing premise
The manually annotated ground-truth correspondences in HardMatch are accurate and unbiased, and the observed gains are caused by the described scaling rather than unstated implementation choices.
What would settle it
An independent re-annotation or verification of the HardMatch correspondences that reveals systematic errors, or a controlled experiment in which competing methods receive identical data scaling and still match LoMa performance.
Figures












read the original abstract
Local feature matching has long been a fundamental component of 3D vision systems such as Structure-from-Motion (SfM), yet progress has lagged behind the rapid advances of modern data-driven approaches. The newer approaches, such as feed-forward reconstruction models, have benefited extensively from scaling dataset sizes, whereas local feature matching models are still only trained on a few mid-sized datasets. In this paper, we revisit local feature matching from a data-driven perspective. In our approach, which we call LoMa, we combine large and diverse data mixtures, modern training recipes, scaled model capacity, and scaled compute, resulting in remarkable gains in performance. Since current standard benchmarks mainly rely on collecting sparse views from successful 3D reconstructions, the evaluation of progress in feature matching has been limited to relatively easy image pairs. To address the resulting saturation of benchmarks, we collect 1000 highly challenging image pairs from internet data into a new dataset called HardMatch. Ground truth correspondences for HardMatch are obtained via manual annotation by the authors. In our extensive benchmarking suite, we find that LoMa makes outstanding progress across the board, outperforming the state-of-the-art method ALIKED+LightGlue by +18.6 mAA on HardMatch, +29.5 mAA on WxBS, +21.4 (1m, 10$^\circ$) on InLoc, +24.2 AUC on RUBIK, and +12.4 mAA on IMC 2022. We release our code and models publicly at https://github.com/davnords/LoMa.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces LoMa, a local feature matching approach that scales data mixtures, model capacity, training recipes, and compute to achieve large gains over prior SOTA (ALIKED+LightGlue) on multiple benchmarks: +18.6 mAA on a new HardMatch dataset of 1000 challenging pairs, +29.5 mAA on WxBS, +21.4 (1m, 10°) on InLoc, +24.2 AUC on RUBIK, and +12.4 mAA on IMC 2022. HardMatch ground truth is obtained via manual author annotation; code and models are released publicly.
Significance. If the gains are robust and attributable to scaling, the work shows that local feature matching can follow the scaling trends seen in other vision tasks, with potential benefits for SfM and 3D reconstruction pipelines. The HardMatch benchmark addresses saturation on easier existing datasets. Public code release is a clear strength for reproducibility.
major comments (2)
- [§4] §4 (HardMatch dataset construction): Ground-truth correspondences are produced exclusively by manual annotation from the authors on 1000 internet-sourced difficult pairs. No inter-annotator agreement statistics, annotation protocol details, or cross-validation against independent automatic pipelines are reported. Because the headline result (+18.6 mAA) and the claim of progress on challenging pairs rest on this dataset, the absence of validation leaves the attribution of gains insecure.
- [§5] §5 (Experiments): The manuscript provides no ablation studies isolating the contributions of data scaling, model capacity scaling, and compute scaling, nor sufficient training details (hyperparameters, optimization schedule, data preprocessing, or exact model architecture). This makes it difficult to confirm that the reported improvements derive from the described scaling recipe rather than unstated implementation choices or benchmark-specific tuning.
minor comments (2)
- [Abstract] Abstract: the notation '10$^{circ}$' should be rendered consistently as 10° in the final version.
- [§5] Ensure the full training recipe and model architecture details appear in the main text or supplementary material to support the public code release.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. The comments highlight important aspects of reproducibility and attribution of results, which we address point by point below. We will incorporate revisions to strengthen the paper accordingly.
read point-by-point responses
-
Referee: [§4] §4 (HardMatch dataset construction): Ground-truth correspondences are produced exclusively by manual annotation from the authors on 1000 internet-sourced difficult pairs. No inter-annotator agreement statistics, annotation protocol details, or cross-validation against independent automatic pipelines are reported. Because the headline result (+18.6 mAA) and the claim of progress on challenging pairs rest on this dataset, the absence of validation leaves the attribution of gains insecure.
Authors: We agree that additional transparency on HardMatch construction is essential given its role in the headline results. In the revised manuscript we will expand §4 with a detailed annotation protocol describing pair selection criteria, the visual inspection process and tools used to identify correspondences, verification steps, and quality control measures. While the annotations were performed by the author team with iterative consensus rather than independent annotators, we will report any available intra-team agreement measures and add a discussion of this limitation. We will also include a cross-validation experiment on a subset of pairs against an independent automatic pipeline (e.g., SuperPoint+LightGlue with manual review of discrepancies) to provide supporting evidence of reliability. These additions will directly address concerns about attribution of the reported gains. revision: yes
-
Referee: [§5] §5 (Experiments): The manuscript provides no ablation studies isolating the contributions of data scaling, model capacity scaling, and compute scaling, nor sufficient training details (hyperparameters, optimization schedule, data preprocessing, or exact model architecture). This makes it difficult to confirm that the reported improvements derive from the described scaling recipe rather than unstated implementation choices or benchmark-specific tuning.
Authors: We acknowledge that the current version lacks explicit ablations and comprehensive training details, which limits the ability to isolate scaling effects. In the revision we will add a dedicated ablation subsection in §5 (and supplementary material) that systematically varies data mixture size, model capacity, and compute budget while holding other factors fixed, reporting performance on HardMatch and at least one other benchmark. We will also expand the experimental section with full hyperparameter tables, optimization schedules, data preprocessing pipelines, and precise model architecture specifications (including layer counts, feature dimensions, and training recipe details). These changes will allow readers to better attribute improvements to the scaling approach described in the paper. revision: yes
Circularity Check
No significant circularity in empirical scaling results
full rationale
The paper is an empirical study that trains models on large data mixtures with scaled capacity and compute, then reports performance on held-out benchmarks including a new manually annotated HardMatch dataset. No mathematical derivation, equations, predictions, or first-principles results are present that could reduce to self-defined inputs, fitted parameters renamed as predictions, or load-bearing self-citations of uniqueness theorems. All claims rest on direct experimental measurements against external benchmarks and prior methods; the central results do not reduce by construction to the training inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
In: ECCV (2020) 7, 8
Antequera, M.L., Gargallo, P., Hofinger, M., Bulo, S.R., Kuang, Y., Kontschieder, P.: Mapillary planet-scale depth dataset. In: ECCV (2020) 7, 8
2020
-
[2]
In: CVPR (2016) 2
Arandjelovic, R., Gronat, P., Torii, A., Pajdla, T., Sivic, J.: Netvlad: Cnn archi- tecture for weakly supervised place recognition. In: CVPR (2016) 2
2016
-
[3]
In: ECCV (2022) 4, 8, 10, 13
Arnold, E., Wynn, J., Vicente, S., Garcia-Hernando, G., Monszpart, A., Prisacariu, V., Turmukhambetov, D., Brachmann, E.: Map-free visual relocalization: Metric pose relative to a single image. In: ECCV (2022) 4, 8, 10, 13
2022
-
[4]
In: Leonardis, A., Ricci, E., Roth, S., Russakovsky, O., Sattler, T., Varol, G
Avetisyan, A., Xie, C., Howard-Jenkins, H., Yang, T.Y., Aroudj, S., Patra, S., Zhang, F., Frost, D., Holland, L., Orme, C., Engel, J., Miller, E., Newcombe, R., Balntas, V.: Scenescript: Reconstructing scenes with an autoregressive structured language model. In: Leonardis, A., Ricci, E., Roth, S., Russakovsky, O., Sattler, T., Varol, G. (eds.) ECCV (2025) 7, 8
2025
-
[5]
In: CVPR (2017) 3, 1, 2
Balntas, V., Lenc, K., Vedaldi, A., Mikolajczyk, K.: HPatches: A benchmark and evaluation of handcrafted and learned local descriptors. In: CVPR (2017) 3, 1, 2
2017
-
[6]
In: CVPR (2019) 5, 8
Barath, D., Matas, J., Noskova, J.: MAGSAC: marginalizing sample consensus. In: CVPR (2019) 5, 8
2019
-
[7]
In: CVPR (2020) 5, 8
Barath, D., Noskova, J., Ivashechkin, M., Matas, J.: Magsac++, a fast, reliable and accurate robust estimator. In: CVPR (2020) 5, 8
2020
-
[8]
In: ICCV (2019) 3
Barroso-Laguna, A., Riba, E., Ponsa, D., Mikolajczyk, K.: Key.Net: Keypoint de- tection by handcrafted and learned cnn filters. In: ICCV (2019) 3
2019
-
[9]
Cabon, Y., Murray, N., Humenberger, M.: Virtual kitti 2. arXiv preprint arXiv:2001.10773 (2020) 8
work page internal anchor Pith review arXiv 2001
-
[10]
In: ICCV (2023) 10
Cai, R., Tung, J., Wang, Q., Averbuch-Elor, H., Hariharan, B., Snavely, N.: Dop- pelgangers: Learning to disambiguate images of similar structures. In: ICCV (2023) 10
2023
-
[11]
In: CVPR (2017) 4, 10, 12
Dai,A.,Chang,A.X.,Savva,M.,Halber,M.,Funkhouser,T.,Nießner,M.:Scannet: Richly-annotated 3d reconstructions of indoor scenes. In: CVPR (2017) 4, 10, 12
2017
-
[12]
In: CVPR (2018) 1, 3, 12, 9
DeTone, D., Malisiewicz, T., Rabinovich, A.: Superpoint: Self-supervised interest point detection and description. In: CVPR (2018) 1, 3, 12, 9
2018
-
[13]
In: 3dv (2025) 2
Duisterhof, B.P., Zust, L., Weinzaepfel, P., Leroy, V., Cabon, Y., Revaud, J.: Mast3r-sfm: a fully-integrated solution for unconstrained structure-from-motion. In: 3dv (2025) 2
2025
-
[14]
In: CVPR (2023) 4
Edstedt, J., Athanasiadis, I., Wadenbäck, M., Felsberg, M.: DKM: Dense kernelized feature matching for geometry estimation. In: CVPR (2023) 4
2023
-
[15]
In: CVPRW (2024) 3, 1 16 D
Edstedt, J., Bökman, G., Zhao, Z.: Dedode v2: Analyzing and improving the de- dode keypoint detector. In: CVPRW (2024) 3, 1 16 D. Nordström and J. Edstedt et al
2024
-
[16]
In: 3dv (2024) 2, 3, 4, 5, 6, 8, 12
Edstedt, J., Bökman, G., Wadenbäck, M., Felsberg, M.: DeDoDe: Detect, Don’t Describe – Describe, Don’t Detect for Local Feature Matching. In: 3dv (2024) 2, 3, 4, 5, 6, 8, 12
2024
-
[17]
Edstedt, J., Bökman, G., Wadenbäck, M., Felsberg, M.: Dad: Distilled reinforce- ment learning for diverse keypoint detection. arXiv preprint arXiv:2503.07347 (2025) 3, 4, 5, 1
- [18]
-
[19]
In: CVPR (2024) 2, 4, 12, 9
Edstedt, J., Sun, Q., Bökman, G., Wadenbäck, M., Felsberg, M.: RoMa: Robust dense feature matching. In: CVPR (2024) 2, 4, 12, 9
2024
-
[20]
In: CVPR (2025) 2
Elflein, S., Zhou, Q., Leal-Taixé, L.: Light3r-sfm: Towards feed-forward structure- from-motion. In: CVPR (2025) 2
2025
-
[21]
In: CVPR (2016) 8
Gaidon, A., Wang, Q., Cabon, Y., Vig, E.: Virtual worlds as proxy for multi-object tracking analysis. In: CVPR (2016) 8
2016
-
[22]
In: ECCV (2020) 3
Germain, H., Bourmaud, G., Lepetit, V.: S2DNet: learning image features for ac- curate sparse-to-dense matching. In: ECCV (2020) 3
2020
-
[23]
Cambridge university press (2003) 1
Hartley, R., Zisserman, A.: Multiple view geometry in computer vision. Cambridge university press (2003) 1
2003
-
[24]
In: CVPR (2024) 2
He, X., Sun, J., Wang, Y., Peng, S., Huang, Q., Bao, H., Zhou, X.: Detector-free structure from motion. In: CVPR (2024) 2
2024
-
[25]
Howard, A., Trulls, E., Yi, K.M., Mishkin, D., Dane, S., Jin, Y.: Image match- ing challenge 2022 (2022),https://kaggle.com/competitions/image-matching- challenge-20224, 11, 13
2022
-
[26]
In: ICCV (2021) 4
Jafarzadeh, A., Antequera, M.L., Gargallo, P., Kuang, Y., Toft, C., Kahl, F., Sat- tler, T.: Crowddriven: A new challenging dataset for outdoor visual localization. In: ICCV (2021) 4
2021
-
[27]
In: CVPR (2025) 7, 8
Jiang, H., Xu, Z., Xie, D., Chen, Z., Jin, H., Luan, F., Shu, Z., Zhang, K., Bi, S., Sun, X., Gu, J., Huang, Q., Pavlakos, G., Tan, H.: Megasynth: Scaling up 3d scene reconstruction with synthesized data. In: CVPR (2025) 7, 8
2025
-
[28]
In: CVPR (2025) 2
Lee, J., Yoo, S.: Dense-sfm: Structure from motion with dense consistent matching. In: CVPR (2025) 2
2025
-
[29]
In: ECCV (2024) 2, 4, 6, 12, 9
Leroy, V., Cabon, Y., Revaud, J.: Grounding image matching in 3d with mast3r. In: ECCV (2024) 2, 4, 6, 12, 9
2024
-
[30]
In: CVPR (2018) 3, 4, 8, 10, 12
Li, Z., Snavely, N.: Megadepth: Learning single-view depth prediction from internet photos. In: CVPR (2018) 3, 4, 8, 10, 12
2018
-
[31]
Depth Anything 3: Recovering the Visual Space from Any Views
Lin, H., Chen, S., Liew, J.H., Chen, D.Y., Li, Z., Shi, G., Feng, J., Kang, B.: Depth anything 3: Recovering the visual space from any views. arXiv preprint arXiv:2511.10647 (2025) 11
work page internal anchor Pith review arXiv 2025
-
[32]
In: ICCV (2023) 2, 3, 4, 6, 12, 9
Lindenberger, P., Sarlin, P.E., Pollefeys, M.: LightGlue: Local Feature Matching at Light Speed. In: ICCV (2023) 2, 3, 4, 6, 12, 9
2023
-
[33]
tpami33(5) (2010) 1
Liu, C., Yuen, J., Torralba, A.: Sift flow: Dense correspondence across scenes and its applications. tpami33(5) (2010) 1
2010
-
[34]
In: CVPR (2025) 11, 13
Loiseau, T., Bourmaud, G.: Rubik: A structured benchmark for image matching across geometric challenges. In: CVPR (2025) 11, 13
2025
-
[35]
In: ICLR (2019) 7
Loshchilov, I., Hutter, F.: Decoupled weight decay regularization. In: ICLR (2019) 7
2019
-
[36]
IJCV (2004) 3 LoMa: Local Feature Matching Revisited 17
Lowe, D.G.: Distinctive image features from scale-invariant keypoints. IJCV (2004) 3 LoMa: Local Feature Matching Revisited 17
2004
-
[37]
In: CVPR (2016) 8
Mayer, N., Ilg, E., Hausser, P., Fischer, P., Cremers, D., Dosovitskiy, A., Brox, T.: A large dataset to train convolutional networks for disparity, optical flow, and scene flow estimation. In: CVPR (2016) 8
2016
-
[38]
In: BMVC (2015) 3, 4, 10, 12, 5
Mishkin, D., Matas, J., Perdoch, M., Lenc, K.: WxBS: Wide baseline stereo gen- eralizations. In: BMVC (2015) 3, 4, 10, 12, 5
2015
-
[39]
In: ECCV (2018) 3
Mishkin, D., Radenović, F., Matas, J.: Repeatability Is Not Enough: Learning Affine Regions via Discriminability. In: ECCV (2018) 3
2018
-
[40]
In: NeurIPS (2019) 7
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J., Chanan, G., Killeen, T., Lin, Z., Gimelshein, N., Antiga, L., et al.: Pytorch: An imperative style, high- performance deep learning library. In: NeurIPS (2019) 7
2019
-
[41]
In: ICCV (2021) 7, 8
Reizenstein,J.,Shapovalov,R.,Henzler,P.,Sbordone,L.,Labatut,P.,Novotny,D.: Common objects in 3d: Large-scale learning and evaluation of real-life 3d category reconstruction. In: ICCV (2021) 7, 8
2021
-
[42]
In: NeurIPS (2019) 3
Revaud, J., De Souza, C., Humenberger, M., Weinzaepfel, P.: R2d2: Reliable and Repeatable Detector and Descriptor. In: NeurIPS (2019) 3
2019
-
[43]
In: ICCV (2021) 8
Roberts, M., Ramapuram, J., Ranjan, A., Kumar, A., Bautista, M.A., Paczan, N., Webb, R., Susskind, J.M.: Hypersim: A photorealistic synthetic dataset for holistic indoor scene understanding. In: ICCV (2021) 8
2021
-
[44]
In: ICCV (2011) 3
Rublee, E., Rabaud, V., Konolige, K., Bradski, G.: ORB: An efficient alternative to SIFT or SURF. In: ICCV (2011) 3
2011
-
[45]
In: CVPR (2019) 11, 2
Sarlin, P.E., Cadena, C., Siegwart, R., Dymczyk, M.: From coarse to fine: Robust hierarchical localization at large scale. In: CVPR (2019) 11, 2
2019
-
[46]
In: CVPR (2020) 2, 3, 10, 12, 9
Sarlin, P.E., DeTone, D., Malisiewicz, T., Rabinovich, A.: Superglue: Learning feature matching with graph neural networks. In: CVPR (2020) 2, 3, 10, 12, 9
2020
-
[47]
In: CVPR (2018) 4
Sattler, T., Maddern, W., Toft, C., Torii, A., Hammarstrand, L., Stenborg, E., Safari,D.,Okutomi,M.,Pollefeys,M.,Sivic,J.,Kahl,F.,Pajdla,T.:Benchmarking 6dof outdoor visual localization in changing conditions. In: CVPR (2018) 4
2018
-
[48]
In: CVPR (2016) 7
Schönberger, J.L., Frahm, J.M.: Structure-from-Motion Revisited. In: CVPR (2016) 7
2016
-
[49]
Su, J., Lu, Y., Pan, S., Murtadha, A., Wen, B., Liu, Y.: Roformer: Enhanced transformer with rotary position embedding (2023),https://arxiv.org/abs/ 2104.098646
work page internal anchor Pith review arXiv 2023
-
[50]
In: CVPR (2021) 2, 4, 10, 12, 1, 9
Sun, J., Shen, Z., Wang, Y., Bao, H., Zhou, X.: LoFTR: Detector-free local feature matching with transformers. In: CVPR (2021) 2, 4, 10, 12, 1, 9
2021
-
[51]
In: CVPR (2018) 4, 11, 13
Taira, H., Okutomi, M., Sattler, T., Cimpoi, M., Pollefeys, M., Sivic, J., Pajdla, T., Torii, A.: Inloc: Indoor visual localization with dense matching and view synthesis. In: CVPR (2018) 4, 11, 13
2018
-
[52]
In: CVPR (2019) 3
Tian, Y., Yu, X., Fan, B., Wu, F., Heijnen, H., Balntas, V.: Sosnet: Second order similarity regularization for local descriptor learning. In: CVPR (2019) 3
2019
-
[53]
In: CVPR (2021) 8
Tosi, F., Liao, Y., Schmitt, C., Geiger, A.: Smd-nets: Stereo mixture density net- works. In: CVPR (2021) 8
2021
-
[54]
In: ECCV (2024) 7, 8
Tung, J., Chou, G., Cai, R., Yang, G., Zhang, K., Wetzstein, G., Hariharan, B., Snavely, N.: Megascenes: Scene-level view synthesis at scale. In: ECCV (2024) 7, 8
2024
-
[55]
In: NeurIPS (2020) 3, 8, 12, 1, 9
Tyszkiewicz, M., Fua, P., Trulls, E.: DISK: Learning local features with policy gradient. In: NeurIPS (2020) 3, 8, 12, 1, 9
2020
-
[56]
In: CVPR (2015) 3
Verdie, Y., Yi, K., Fua, P., Lepetit, V.: Tilde: A temporally invariant learned detector. In: CVPR (2015) 3
2015
-
[57]
In: CVPR (2025) 8 18 D
Vuong, K., Ghosh, A., Ramanan, D., Narasimhan, S., Tulsiani, S.: Aerialmegadepth: Learning aerial-ground reconstruction and view synthesis. In: CVPR (2025) 8 18 D. Nordström and J. Edstedt et al
2025
-
[58]
In: ICCV (2021) 3
Wang, B., Chen, C., Cui, Z., Qin, J., Lu, C.X., Yu, Z., Zhao, P., Dong, Z., Zhu, F., Trigoni, N., Markham, A.: P2-net: Joint description and detection of local features for pixel and point matching. In: ICCV (2021) 3
2021
-
[59]
Wang, J., Yuan, Y., Zheng, R., Lin, Y., Gao, J., Chen, L.Z., Bao, Y., Zhang, Y., Zeng, C., Zhou, Y., et al.: Spatialvid: A large-scale video dataset with spatial annotations. arXiv preprint arXiv:2509.09676 (2025) 7, 8
-
[60]
In: CVPR (2025) 2, 4, 12, 9
Wang, J., Chen, M., Karaev, N., Vedaldi, A., Rupprecht, C., Novotny, D.: Vggt: Visual geometry grounded transformer. In: CVPR (2025) 2, 4, 12, 9
2025
- [61]
-
[62]
In: iros (2020) 8
Wang, W., Zhu, D., Wang, X., Hu, Y., Qiu, Y., Wang, C., Hu, Y., Kapoor, A., Scherer, S.: Tartanair: A dataset to push the limits of visual slam. In: iros (2020) 8
2020
-
[63]
In: NeurIPS (2025) 11, 13, 2
Wang, Z., Bian, W., Li, X., Tao, Y., Wang, J., Fallon, M., Prisacariu, V.A.: Seeing in the dark: Benchmarking egocentric 3d vision with the oxford day-and-night dataset. In: NeurIPS (2025) 11, 13, 2
2025
-
[64]
In: CVPR (2025) 10
Xiangli, Y., Cai, R., Chen, H., Byrne, J., Snavely, N.: Doppelgangers++: Improved visual disambiguation with geometric 3d features. In: CVPR (2025) 10
2025
-
[65]
In: CVPR (2020) 8
Yao, Y., Luo, Z., Li, S., Zhang, J., Ren, Y., Zhou, L., Fang, T., Quan, L.: Blend- edmvs: A large-scale dataset for generalized multi-view stereo networks. In: CVPR (2020) 8
2020
-
[66]
In: ICCV (2023) 8
Yeshwanth, C., Liu, Y.C., Nießner, M., Dai, A.: Scannet++: A high-fidelity dataset of 3d indoor scenes. In: ICCV (2023) 8
2023
-
[67]
In: NeurIPS (2025) 4, 6, 12, 9
Zhang, Y., Keetha, N., Lyu, C., Jhamb, B., Chen, Y., Qiu, Y., Karhade, J., Jha, S., Hu, Y., Ramanan, D., Scherer, S., Wang, W.: Ufm: A simple path towards unified dense correspondence with flow. In: NeurIPS (2025) 4, 6, 12, 9
2025
-
[68]
IEEE Transac- tions on Instrumentation & Measurement72(2023) 1, 3, 5, 12, 9
Zhao,X.,Wu,X.,Chen,W.,Chen,P.C.Y.,Xu,Q.,Li,Z.:Aliked:Alighterkeypoint and descriptor extraction network via deformable transformation. IEEE Transac- tions on Instrumentation & Measurement72(2023) 1, 3, 5, 12, 9
2023
-
[69]
Zhao, X., Wu, X., Miao, J., Chen, W., Chen, P.C., Li, Z.: Alike: Accurate and lightweight keypoint detection and descriptor extraction. IEEE Transactions on Multimedia (2022) 3 LoMa: Local Feature Matching Revisited 1 LoMa: Local Feature Matching Revisited Supplementary Material A Additional Experiments A.1 Performance using Different Detectors All the re...
2022
-
[70]
C.2 Correspondence Evaluation An alternative methodology involves directly matching the ground truth key- points
We compute the pixel errors at a resolution of640×640and do not evaluate on the approximately 20 pairs we label dynamic. C.2 Correspondence Evaluation An alternative methodology involves directly matching the ground truth key- points. This has the benefit of working even for image pairs where a Fundamen- tal matrix is not well defined,e.g. dynamic scenes ...
2048
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.