Simulation-Driven Evolutionary Motion Parameterization for Contact-Rich Granular Scooping with a Soft Conical Robotic Hand
Pith reviewed 2026-05-10 19:59 UTC · model grok-4.3
The pith
A physics-based simulation of a soft conical hand combined with evolutionary optimization enables reliable scooping of granular materials.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We present a physics-based simulation approach that accurately models the soft tool's morphing behavior from flat sheets to adaptive conical structures. Combined with an evolutionary strategy framework, this enables automatic optimization of scooping trajectories. Validation in simulation and real-robot experiments demonstrates strong generalization across challenging granular scooping tasks.
What carries the argument
The physics-based simulation model of the deformable soft conical robotic hand's passive reconfiguration, paired with an evolutionary strategy for trajectory optimization.
If this is right
- The optimized trajectories transfer effectively to real robots.
- It handles a range of challenging scooping tasks beyond previous methods.
- No manual tuning of parameters is required for different conditions.
- The method improves scooping efficiency by adapting to container surfaces.
Where Pith is reading between the lines
- This suggests soft robotic tools can be controlled more practically in variable environments by relying on simulation rather than sensing.
- Similar simulation-driven optimization might apply to other soft robot manipulation tasks involving contact with granular or deformable materials.
Load-bearing premise
The physics-based simulation accurately captures the passive reconfiguration dynamics and morphing behavior of the soft conical hand from flat sheets to adaptive structures during contact-rich scooping.
What would settle it
An experiment showing that the real soft hand's deformation during scooping deviates significantly from the simulation predictions, leading to unsuccessful trajectory optimization in practice.
Figures







read the original abstract
Tool-based scooping is vital in robot-assisted tasks, enabling interaction with objects of varying sizes, shapes, and material states. Recent studies have shown that flexible, reconfigurable soft robotic end-effectors can adapt their shape to maintain consistent contact with container surfaces during scooping, improving efficiency compared to rigid tools. These soft tools can adjust to varying container sizes and materials without requiring complex sensing or control. However, the inherent compliance and complex deformation behavior of soft robotics introduce significant control complexity that limits practical applications. To address this challenge, this paper presents the development of a physics-based simulation model of a deformable soft conical robotic hand that captures its passive reconfiguration dynamics and enables systematic trajectory optimization for scooping tasks. We propose a novel physics-based simulation approach that accurately models the soft tool's morphing behavior from flat sheets to adaptive conical structures, combined with an evolutionary strategy framework that automatically optimizes scooping trajectories without manual parameter tuning. We validate the optimized trajectories through both simulation and real-robot experiments. The results demonstrate strong generalization and successfully address a range of challenging tasks previously beyond the reach of existing approaches. Videos of our experiments are available online: https://sites.google.com/view/scoopsh
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a physics-based simulation model of a soft conical robotic hand to capture its passive reconfiguration from flat sheets to adaptive conical structures during contact-rich scooping. It combines this with an evolutionary strategy to optimize scooping trajectories without manual tuning, then validates the resulting motions in both simulation and real-robot experiments, claiming strong generalization across challenging granular scooping tasks that exceed prior methods.
Significance. If the simulation fidelity for passive morphing and contact dynamics holds and the optimized trajectories transfer robustly, the work offers a systematic, simulation-driven route to parameterizing compliant soft-robot behaviors in manipulation. This could reduce reliance on complex sensing or hand-tuning for reconfigurable end-effectors and extend to other contact-rich tasks. The evolutionary optimization inside an independent physics simulator is a methodological strength that supports reproducibility.
major comments (2)
- [Abstract] Abstract: the central claim that optimized trajectories demonstrate 'strong generalization' and address 'a range of challenging tasks previously beyond the reach of existing approaches' is not accompanied by any quantitative metrics, success rates, error analysis, or sim-to-real deformation comparisons (cone angle, curvature, contact patch, or force matching). This directly weakens the validation of the sim-to-real transfer that the evolutionary search depends upon.
- [Validation / Results] The load-bearing assumption that the physics-based simulator accurately reproduces the hand's passive flattening-to-conical morphing and resulting contact forces under granular interaction is stated but not quantified. Without reported metrics on how well simulated deformation matches hardware (e.g., in the validation or results sections), it is unclear whether the optimized parameters succeed due to model fidelity or simply because the real hand is compliant.
minor comments (1)
- The online video link is referenced but the manuscript does not describe which specific behaviors or failure modes are shown, limiting the reader's ability to interpret the experimental evidence.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and for recognizing the methodological contributions of the simulation-driven evolutionary approach. We will revise the manuscript to strengthen the quantitative support for our claims on generalization and sim-to-real fidelity.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that optimized trajectories demonstrate 'strong generalization' and address 'a range of challenging tasks previously beyond the reach of existing approaches' is not accompanied by any quantitative metrics, success rates, error analysis, or sim-to-real deformation comparisons (cone angle, curvature, contact patch, or force matching). This directly weakens the validation of the sim-to-real transfer that the evolutionary search depends upon.
Authors: We agree that the abstract would be strengthened by explicit quantitative backing for the generalization claims. In the revised manuscript we will update the abstract to reference specific metrics drawn from the experimental results, including task success rates, quantitative sim-to-real deformation comparisons (cone angle, curvature, contact patch), and force-matching data where measured. We will also add a short error analysis summary to directly tie the reported performance to the sim-to-real transfer that underpins the evolutionary optimization. revision: yes
-
Referee: [Validation / Results] The load-bearing assumption that the physics-based simulator accurately reproduces the hand's passive flattening-to-conical morphing and resulting contact forces under granular interaction is stated but not quantified. Without reported metrics on how well simulated deformation matches hardware (e.g., in the validation or results sections), it is unclear whether the optimized parameters succeed due to model fidelity or simply because the real hand is compliant.
Authors: We acknowledge that explicit quantitative validation of the simulator's fidelity is necessary. We will add a dedicated validation subsection (or expand the existing results section) that reports direct metrics comparing simulated and physical deformations, such as cone angle, curvature, contact patch geometry, and available force measurements. This addition will clarify the degree of model accuracy and justify the use of simulation for trajectory optimization. The current manuscript relies primarily on successful hardware transfer and visual agreement; we agree that numerical fidelity metrics are required for rigor. revision: yes
Circularity Check
No circularity: optimization and validation remain independent of target data
full rationale
The paper constructs a physics-based simulator of the soft hand's passive morphing, runs an evolutionary optimizer entirely inside that simulator to produce trajectories, and then transfers those trajectories to hardware for validation. No equation, parameter, or claim reduces to a fitted quantity defined by the real-robot outcomes; the sim-to-real transfer is presented as an external test rather than a self-referential loop. No self-citations, uniqueness theorems, or ansatzes are invoked in a load-bearing way within the provided derivation chain. The generalization claim rests on the independent real-robot experiments, not on any redefinition or renaming of the simulation outputs themselves.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The SH sheet is modeled as a mass–spring–damping system... elastic energy E = ½ Σ ks(‖xi−xj‖−l0ij)² + ½ Σ kb(θpq−θ0pq)²
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
CMA-ES... optimizes both trajectory and hand roll angle
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Scone: A food scooping robot learning framework with active perception,
Y .-L. Tai, Y . C. Chiu, Y .-W. Chao, and Y .-T. Chen, “Scone: A food scooping robot learning framework with active perception,” in Conference on Robot Learning, pp. 849–865, PMLR, 2023
work page 2023
-
[2]
L2d2: Robot learning from 2d drawings,
S. A. Mehta, H. Nemlekar, H. Sumant, and D. P. Losey, “L2d2: Robot learning from 2d drawings,”arXiv preprint arXiv:2505.12072, 2025
-
[3]
Learning compositional models of robot skills for task and motion planning,
Z. Wang, C. R. Garrett, L. P. Kaelbling, and T. Lozano-P ´erez, “Learning compositional models of robot skills for task and motion planning,”The International Journal of Robotics Research, vol. 40, no. 6-7, pp. 866–894, 2021
work page 2021
-
[4]
Learning robotic manipulation of granular media,
C. Schenck, J. Tompson, S. Levine, and D. Fox, “Learning robotic manipulation of granular media,” inConference on Robot Learning, pp. 239–248, PMLR, 2017
work page 2017
-
[5]
S. Ruan, W. Liu, X. Wang, X. Meng, and G. S. Chirikjian, “Primp: Probabilistically-informed motion primitives for efficient affordance learning from demonstration,”IEEE Transactions on Robotics, vol. 40, pp. 2868–2887, 2024
work page 2024
-
[6]
Soda–soft origami dynamic utensil for assisted feeding,
Y . R. Song and Y . Luo, “Soda–soft origami dynamic utensil for assisted feeding,” in2025 IEEE 8th International Conference on Soft Robotics (RoboSoft), pp. 1–8, IEEE, 2025
work page 2025
-
[7]
Kiri-spoon: A kirigami utensil for robot-assisted feeding,
M. Keely, B. Franco, C. Grothoff, R. K. Jenamani, T. Bhattacharjee, D. P. Losey, and H. Nemlekar, “Kiri-spoon: A kirigami utensil for robot-assisted feeding,”arXiv preprint arXiv:2501.01323, 2025
-
[8]
Learning thin deformable object manipulation with a multi-sensory integrated soft hand,
C. Zhao, C. Jiang, L. Luo, S. Yuan, Q. Chen, and H. Yu, “Learning thin deformable object manipulation with a multi-sensory integrated soft hand,”IEEE Transactions on Robotics, 2025
work page 2025
-
[9]
L. Franco, E. Turco, V . Bo, M. Pozzi, M. Malvezzi, D. Prattichizzo, and G. Salvietti, “The double-scoop gripper: A tendon-driven soft-rigid end-effector for food handling exploiting constraints in narrow spaces,” in2024 IEEE International Conference on Robotics and Automation (ICRA), pp. 4170–4176, IEEE, 2024
work page 2024
-
[10]
Diff-control: A stateful diffusion-based policy for imitation learning,
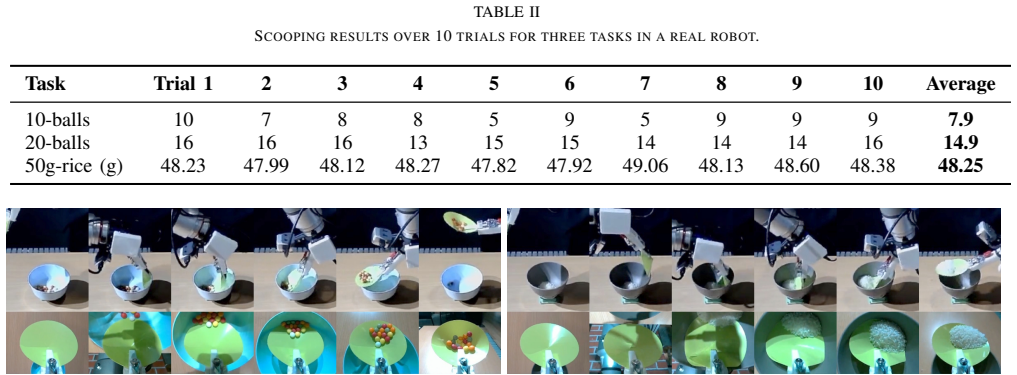
X. Liu, Y . Zhou, F. Weigend, S. Sonawani, S. Ikemoto, and H. B. Amor, “Diff-control: A stateful diffusion-based policy for imitation learning,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 7453–7460, IEEE, 2024. TABLE II SCOOPING RESULTS OVER10TRIALS FOR THREE TASKS IN A REAL ROBOT. Task Trial 1 2 3 4 5 6 7 8 9 1...
work page 2024
-
[11]
D. Das, A. Patankar, N. Chakraborty, C. Ramakrishnan, and I. Ra- makrishnan, “Screw geometry meets bandits: Incremental acquisition of demonstrations to generate manipulation plans,”arXiv preprint arXiv:2410.18275, 2024
-
[12]
S 2-diffusion: Generalizing from instance-level to category-level skills in robot manipulation,
Q. Yang, M. C. Welle, D. Kragic, and O. Andersson, “S 2-diffusion: Generalizing from instance-level to category-level skills in robot manipulation,”arXiv preprint arXiv:2502.09389, 2025
-
[13]
T. Takahashi, C. C. Beltran-Hernandez, Y . Kuroda, K. Tanaka, M. Hamaya, and Y . Ushiku, “Scu-hand: Soft conical universal robotic hand for scooping granular media from containers of various sizes,” arXiv preprint arXiv:2505.04162, 2025
-
[14]
Learning scooping deformable plastic objects using tactile sensors,
Y . Kageyama, M. Hamaya, K. Tanaka, A. Hashimoto, and H. Saito, “Learning scooping deformable plastic objects using tactile sensors,” in2024 IEEE 20th International Conference on Automation Science and Engineering (CASE), pp. 4020–4025, IEEE, 2024
work page 2024
-
[15]
Lava: Long-horizon visual action based food acquisition,
A. Bhaskar, R. Liu, V . D. Sharma, G. Shi, and P. Tokekar, “Lava: Long-horizon visual action based food acquisition,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 8929–8935, IEEE, 2024
work page 2024
-
[16]
Robotsmith: Generative robotic tool design for acquisition of complex manipulation skills, 2025
C. Lin, H. Yuan, Y . Wang, X. Qiu, T.-H. Wang, M. Guo, B. Wang, Y . Narang, D. Fox, and C. Gan, “Robotsmith: Generative robotic tool design for acquisition of complex manipulation skills,”arXiv preprint arXiv:2506.14763, 2025
-
[17]
Investigat- ing strategies enabling novice users to teach plannable hierarchical tasks to robots,
N. Moorman, A. Singh, M. Natarajan, E. Hedlund-Botti, M. Schrum, C. Yang, L. Seelam, M. C. Gombolay, and N. Gopalan, “Investigat- ing strategies enabling novice users to teach plannable hierarchical tasks to robots,”The International Journal of Robotics Research, p. 02783649241301075, 2024
work page 2024
-
[18]
Goats: Goal sampling adaptation for scooping with curriculum reinforcement learning,
Y . Niu, S. Jin, Z. Zhang, J. Zhu, D. Zhao, and L. Zhang, “Goats: Goal sampling adaptation for scooping with curriculum reinforcement learning,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1023–1030, IEEE, 2023
work page 2023
-
[19]
N. Franceschini, P. Thangeda, M. Ornik, and K. Hauser, “Autonomous excavation of challenging terrain using oscillatory primitives and adaptive impedance control,”arXiv preprint arXiv:2409.18273, 2024
-
[20]
A soft-rigid hybrid gripper with lateral compliance and dexterous in-hand manipulation,
W. Zhu, C. Lu, Q. Zheng, Z. Fang, H. Che, K. Tang, M. Zhu, S. Liu, and Z. Wang, “A soft-rigid hybrid gripper with lateral compliance and dexterous in-hand manipulation,”IEEE/ASME Transactions on Mechatronics, vol. 28, no. 1, pp. 104–115, 2022
work page 2022
-
[21]
Riso: Combining rigid grippers with soft switchable adhesives,
S. A. Mehta, Y . Kim, J. Hoegerman, M. D. Bartlett, and D. P. Losey, “Riso: Combining rigid grippers with soft switchable adhesives,” in 2023 IEEE International Conference on Soft Robotics (RoboSoft), pp. 1–8, IEEE, 2023
work page 2023
-
[22]
Dexgrip: Multi- modal soft gripper with dexterous grasping and in-hand manipulation capacity,
X. Wang, L. Horrigan, J. Pinskier, G. Shi, V . Viswanathan, L. Liow, T. Bandyopadhyay, J. J. Chung, and D. Howard, “Dexgrip: Multi- modal soft gripper with dexterous grasping and in-hand manipulation capacity,” in2025 IEEE 8th International Conference on Soft Robotics (RoboSoft), pp. 1–6, IEEE, 2025
work page 2025
-
[23]
Fish mouth inspired origami gripper for robust multi-type underwater grasping,
H. Guo, J. Huang, I. Zhang, B. Liang, X. Ma, Y . Liu, and J. Zhou, “Fish mouth inspired origami gripper for robust multi-type underwater grasping,”arXiv preprint arXiv:2503.11049, 2025
-
[24]
J. Huang, K. Chen, J. Zhou, X. Lin, P. Abbeel, Q. Dou, and Y . Liu, “Dih-tele: Dexterous in-hand teleoperation framework for learning multiobjects manipulation with tactile sensing,”IEEE/ASME Trans- actions on Mechatronics, 2025
work page 2025
-
[25]
Design and control of soft robots using differentiable simulation,
M. B ¨acher, E. Knoop, and C. Schumacher, “Design and control of soft robots using differentiable simulation,”Current Robotics Reports, vol. 2, no. 2, pp. 211–221, 2021
work page 2021
-
[26]
Softgym: Benchmarking deep reinforcement learning for deformable object manipulation,
X. Lin, Y . Wang, J. Olkin, and D. Held, “Softgym: Benchmarking deep reinforcement learning for deformable object manipulation,” in Conference on Robot Learning, pp. 432–448, PMLR, 2021
work page 2021
-
[27]
Elastica: A compliant mechanics environment for soft robotic control,
N. Naughton, J. Sun, A. Tekinalp, T. Parthasarathy, G. Chowdhary, and M. Gazzola, “Elastica: A compliant mechanics environment for soft robotic control,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3389–3396, 2021
work page 2021
-
[28]
Robotic object insertion with a soft wrist through sim-to-real privi- leged training,
Y . Fuchioka, C. C. Beltran-Hernandez, H. Nguyen, and M. Hamaya, “Robotic object insertion with a soft wrist through sim-to-real privi- leged training,” in2024 IEEE/RSJ International Conference on Intel- ligent Robots and Systems (IROS), pp. 9159–9166, IEEE, 2024
work page 2024
-
[29]
3d force and contact estimation for a soft-bubble visuotactile sensor using fem,
J.-C. Peng, S. Yao, and K. Hauser, “3d force and contact estimation for a soft-bubble visuotactile sensor using fem,” in2024 IEEE Inter- national Conference on Robotics and Automation (ICRA), pp. 5666– 5672, IEEE, 2024
work page 2024
-
[30]
Efficient tactile simulation with differentiability for robotic manipulation,
J. Xu, S. Kim, T. Chen, A. R. Garcia, P. Agrawal, W. Matusik, and S. Sueda, “Efficient tactile simulation with differentiability for robotic manipulation,” inConference on Robot Learning, pp. 1488– 1498, PMLR, 2023
work page 2023
-
[31]
A review on origami simula- tions: from kinematics, to mechanics, toward multiphysics,
Y . Zhu, M. Schenk, and E. T. Filipov, “A review on origami simula- tions: from kinematics, to mechanics, toward multiphysics,”Applied Mechanics Reviews, vol. 74, no. 3, p. 030801, 2022
work page 2022
-
[32]
T. Tachi, “Simulation of rigid origami,”Origami, vol. 4, no. 08, pp. 175–187, 2009
work page 2009
-
[33]
X. Zhao, W. Ding, Y . An, Y . Du, T. Yu, M. Li, M. Tang, and J. Wang, “Fast segment anything,”arXiv preprint arXiv:2306.12156, 2023
-
[34]
Mujoco: A physics engine for model-based control,
E. Todorov, T. Erez, and Y . Tassa, “Mujoco: A physics engine for model-based control,” in2012 IEEE/RSJ international conference on intelligent robots and systems, pp. 5026–5033, IEEE, 2012
work page 2012
-
[35]
K. Zakka, B. Tabanpour, Q. Liao, M. Haiderbhai, S. Holt, J. Y . Luo, A. Allshire, E. Frey, K. Sreenath, L. A. Kahrs,et al., “Mujoco playground,”arXiv preprint arXiv:2502.08844, 2025
-
[36]
N. Hansen and A. Ostermeier, “Adapting arbitrary normal mutation distributions in evolution strategies: The covariance matrix adaptation,” inProceedings of IEEE international conference on evolutionary computation, pp. 312–317, IEEE, 1996
work page 1996
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.