From Blobs to Spokes: High-Fidelity Surface Reconstruction via Oriented Gaussians
Pith reviewed 2026-05-10 17:50 UTC · model grok-4.3
The pith
Oriented Gaussians with learnable normals produce complete watertight meshes from 3D splatting
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
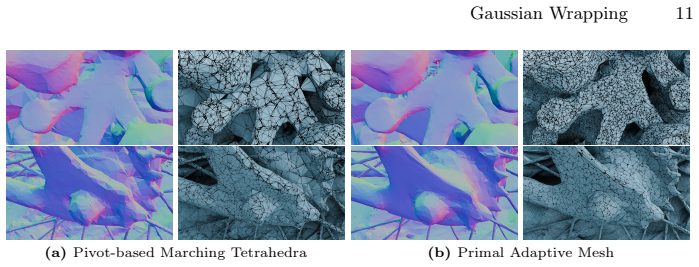
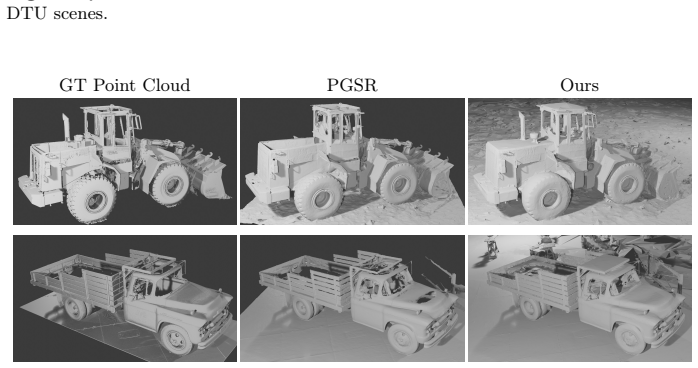
Gaussian Wrapping introduces a learnable oriented normal per Gaussian and an adapted attenuation model that yields closed-form expressions for both the normal field and an occupancy field at any point in space. A consistency loss plus a dedicated densification strategy force every Gaussian to lie on and enclose the true surface, closing holes and eliminating spurious geometry. The modified rasterizer outputs depth as an isosurface of this field, and Primal Adaptive Meshing extracts watertight meshes at chosen resolutions; the method reports new state-of-the-art results on DTU and Tanks and Temples while recovering thin structures such as bicycle spokes using far fewer primitives than prior S
What carries the argument
The learnable oriented normal together with the adapted attenuation formulation, which supplies closed-form occupancy and normal fields used to define an isosurface for mesh extraction
If this is right
- Standard surface evaluation protocols contain measurable biases that the proposed alternatives avoid
- Meshes of arbitrary resolution can be extracted on demand for any region of interest via primal adaptive meshing
- Complete watertight meshes are obtained at a small fraction of the primitive count required by concurrent methods
- Thin structures that defeat existing approaches become recoverable as part of a single closed surface
Where Pith is reading between the lines
- The same oriented-Gaussian occupancy field could be queried directly for ray-tracing or collision queries without an intermediate mesh
- Because the representation remains compact, it may scale to city-scale scenes where memory limits currently force downsampling
- The formulation might transfer to dynamic or time-varying splatting by adding a temporal consistency term on the oriented normals
Load-bearing premise
That learnable oriented normals, adapted attenuation, a consistency loss, and densification will place every Gaussian exactly on the true surface and produce a closed shell without holes or extra geometry
What would settle it
Reconstruct the bicycle scene from the DTU dataset and check whether the extracted mesh still contains holes or missing spokes when measured with the two rigorous evaluation protocols introduced in the paper
Figures












read the original abstract
3D Gaussian Splatting (3DGS) has revolutionized fast novel view synthesis, yet its opacity-based formulation makes surface extraction fundamentally difficult. Unlike implicit methods built on Signed Distance Fields or occupancy, 3DGS lacks a global geometric field, forcing existing approaches to resort to heuristics such as TSDF fusion of blended depth maps. Inspired by the Objects as Volumes framework, we derive a principled occupancy field for Gaussian Splatting and show how it can be used to extract highly accurate watertight meshes of complex scenes. Our key contribution is to introduce a learnable oriented normal at each Gaussian element and to define an adapted attenuation formulation, which leads to closed-form expressions for both the normal and occupancy fields at arbitrary locations in space. We further introduce a novel consistency loss and a dedicated densification strategy to enforce Gaussians to wrap the entire surface by closing geometric holes, ensuring a complete shell of oriented primitives. We modify the differentiable rasterizer to output depth as an isosurface of our continuous model, and introduce Primal Adaptive Meshing for Region-of-Interest meshing at arbitrary resolution. We additionally expose fundamental biases in standard surface evaluation protocols and propose two more rigorous alternatives. Overall, our method Gaussian Wrapping sets a new state-of-the-art on DTU and Tanks and Temples, producing complete, watertight meshes at a fraction of the size of concurrent work-recovering thin structures such as the notoriously elusive bicycle spokes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Gaussian Wrapping, an extension of 3D Gaussian Splatting for surface reconstruction. It adds learnable oriented normals per Gaussian and an adapted attenuation to derive closed-form expressions for occupancy and normal fields. A novel consistency loss and dedicated densification strategy are proposed to force Gaussians to wrap the full surface and close holes, enabling watertight mesh extraction via a modified rasterizer and Primal Adaptive Meshing. The method claims SOTA quantitative results on DTU and Tanks & Temples, superior recovery of thin structures (e.g., bicycle spokes), and exposes biases in standard surface evaluation protocols.
Significance. If the derivations hold and the empirical results are robust, the work would be significant for bridging explicit Gaussian representations with accurate, complete surface extraction. It offers a more principled alternative to TSDF fusion heuristics while retaining fast rendering, with potential impact on real-time 3D applications. The new evaluation protocols and thin-structure recovery are notable strengths if substantiated.
major comments (3)
- [Abstract, §4] Abstract and §4 (method): The central claim that the combination of oriented normals, adapted attenuation, consistency loss, and densification produces complete, hole-free watertight meshes rests on the assumption that these components force every Gaussian onto the true surface. No derivation or convergence analysis is provided showing that the loss landscape avoids local minima with gaps or spurious geometry; this is load-bearing for the bicycle-spokes result and the 'complete shell' guarantee.
- [Results] Results section (DTU/Tanks & Temples tables): The SOTA claims and thin-structure recovery are reported quantitatively, but without the full loss formulations, ablation tables on the consistency loss and densification hyperparameters, or failure-case analysis, it is impossible to assess whether the improvements are due to the closed-form fields or post-hoc tuning. This directly affects soundness of the 'parameter-free' and 'principled' framing.
- [§3] §3 (occupancy derivation): While closed-form expressions for occupancy and normals are derived from the oriented primitives, the occupancy field is then regularized via the consistency loss rather than being directly fitted; this introduces circularity between the model and the training objective that is not analyzed for stability on thin or complex geometry.
minor comments (2)
- [§3] Notation for the adapted attenuation and oriented normal parameters should be introduced with explicit equations early in §3 to improve readability.
- [Method] The Primal Adaptive Meshing procedure is described at a high level; a pseudocode or step-by-step algorithm would clarify how it differs from standard marching cubes.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major comment point-by-point below, providing clarifications on our methodological choices and empirical support while committing to revisions that strengthen the presentation without overstating theoretical guarantees.
read point-by-point responses
-
Referee: [Abstract, §4] Abstract and §4 (method): The central claim that the combination of oriented normals, adapted attenuation, consistency loss, and densification produces complete, hole-free watertight meshes rests on the assumption that these components force every Gaussian onto the true surface. No derivation or convergence analysis is provided showing that the loss landscape avoids local minima with gaps or spurious geometry; this is load-bearing for the bicycle-spokes result and the 'complete shell' guarantee.
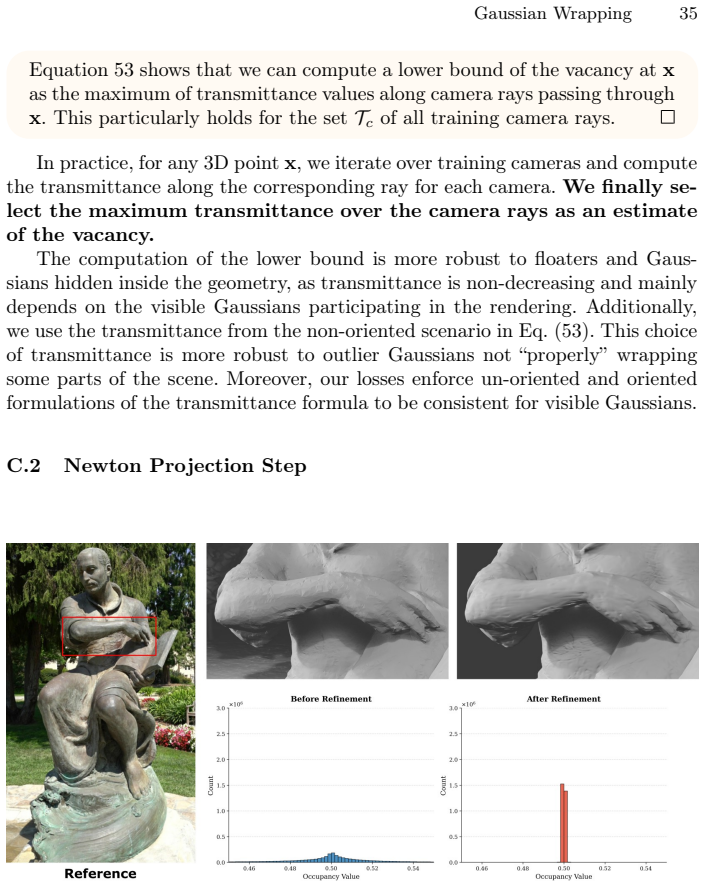
Authors: We agree that no formal convergence analysis or derivation of the loss landscape is provided, and this is a genuine limitation when claiming a 'complete shell' guarantee. The consistency loss penalizes occupancy inconsistencies across views while the densification strategy explicitly targets regions with insufficient Gaussian coverage to close holes. We will revise §4 to include additional discussion of the loss design rationale, supported by new visualizations of intermediate optimization states on thin structures such as bicycle spokes. We will also moderate language in the abstract and method sections to avoid implying a theoretical guarantee. revision: partial
-
Referee: [Results] Results section (DTU/Tanks & Temples tables): The SOTA claims and thin-structure recovery are reported quantitatively, but without the full loss formulations, ablation tables on the consistency loss and densification hyperparameters, or failure-case analysis, it is impossible to assess whether the improvements are due to the closed-form fields or post-hoc tuning. This directly affects soundness of the 'parameter-free' and 'principled' framing.
Authors: The loss formulations are already detailed in §4.2 (consistency loss) and §4.3 (densification). To address the concern, we will add comprehensive ablation tables in the supplementary material examining the consistency loss weight and densification hyperparameters. We will also include a dedicated failure-case analysis section with quantitative and qualitative examples to demonstrate that gains stem from the closed-form fields rather than extensive tuning, thereby supporting the principled framing. revision: yes
-
Referee: [§3] §3 (occupancy derivation): While closed-form expressions for occupancy and normals are derived from the oriented primitives, the occupancy field is then regularized via the consistency loss rather than being directly fitted; this introduces circularity between the model and the training objective that is not analyzed for stability on thin or complex geometry.
Authors: The closed-form occupancy and normal expressions in §3 are derived solely from the oriented Gaussian primitives and adapted attenuation, prior to and independent of the loss. The consistency loss then enforces multi-view agreement between this derived field and observed surfaces, which is a standard regularization step rather than circular. We will add a new paragraph in the revised §3 analyzing stability on thin and complex geometry, including empirical metrics from our DTU and Tanks & Temples experiments showing no observed instability. revision: partial
Circularity Check
No circularity: forward derivation of occupancy from oriented primitives plus independent training components
full rationale
The paper presents a direct mathematical derivation of closed-form occupancy and normal fields from the combination of learnable per-Gaussian oriented normals and an adapted attenuation function. This is a constructive step (new primitives → explicit field expressions) rather than any reduction of the output to the input by definition or fitting. The subsequent consistency loss and densification strategy are explicitly introduced as additional optimization mechanisms to encourage surface wrapping; they are not claimed to be derived from the occupancy equations themselves. No self-citations, uniqueness theorems, or renamed empirical patterns are invoked as load-bearing justifications for the core field expressions. The overall pipeline therefore remains self-contained against external benchmarks and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
free parameters (2)
- learnable oriented normals
- densification and consistency-loss hyperparameters
axioms (1)
- domain assumption Adapted attenuation formulation yields closed-form normal and occupancy fields at arbitrary points
invented entities (1)
-
oriented Gaussian primitive
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
we derive a principled occupancy field for Gaussian Splatting... introduce a learnable oriented normal... adapted attenuation formulation, which leads to closed-form expressions for both the normal and occupancy fields... novel consistency loss and a dedicated densification strategy
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Proposition 1 (Gaussian Vector and Normal Fields). V(x) := ∇log v(x) = sum 1_{n_i^T(x-μ_i)≥0} ∇log(1-G_i(x))
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Amenta, N., Bern, M., Kamvysselis, M.: A new Voronoi-based surface reconstruc- tion algorithm. In: Proceedings of the 25th annual conference on Computer graph- ics and interactive techniques - SIGGRAPH ’98. pp. 415–421. ACM Press (1998)
work page 1998
-
[2]
In: Proceedings of the sixth ACM symposium on Solid modeling and applications
Amenta, N., Choi, S., Kolluri, R.K.: The power crust. In: Proceedings of the sixth ACM symposium on Solid modeling and applications. pp. 249–266. SMA ’01, As- sociation for Computing Machinery (2001)
work page 2001
-
[3]
ACM computing surveys (CSUR)23(3), 345–405 (1991)
Aurenhammer, F.: Voronoi diagrams—a survey of a fundamental geometric data structure. ACM computing surveys (CSUR)23(3), 345–405 (1991)
work page 1991
-
[4]
Barron, J.T., Mildenhall, B., Tancik, M., Hedman, P., Martin Brualla, R., Srini- vasan, P.P.: Mip-NeRF: A Multiscale Representation for Anti-Aliasing Neural Ra- diance Fields. In: Int. Conf. Comput. Vis. pp. 5855–5864 (2021)
work page 2021
-
[5]
Barron, J.T., Mildenhall, B., Verbin, D., Srinivasan, P.P., Hedman, P.: Mip-NeRF 360: Unbounded Anti-Aliased Neural Radiance Fields. In: IEEE Conf. Comput. Vis. Pattern Recog. pp. 5460–5469. IEEE (2022)
work page 2022
- [6]
-
[7]
In: 2025 IEEE/CVF Winter Con- ference on Applications of Computer Vision (WACV)
Blanc, H., Deschaud, J.E., Paljic, A.: Raygauss: Volumetric Gaussian-based Ray Casting for Photorealistic Novel View Synthesis. In: 2025 IEEE/CVF Winter Con- ference on Applications of Computer Vision (WACV). pp. 1808–1817. IEEE (2025)
work page 2025
-
[8]
Celarek, A., Kopanas, G., Drettakis, G., Wimmer, M., Kerbl, B.: Does 3d gaus- sian splatting need accurate volumetric rendering? In: Computer Graphics Forum. vol. 44, p. e70032. Wiley Online Library (2025)
work page 2025
-
[9]
Chen, A., Xu, Z., Geiger, A., Yu, J., Su, H.: TensoRF: Tensorial Radiance Fields. In: Eur. Conf. Comput. Vis. pp. 333–350 (2022)
work page 2022
-
[10]
Chen, D., Li, H., Ye, W., Wang, Y., Xie, W., Zhai, S., Wang, N., Liu, H., Bao, H., Zhang, G.: PGSR: Planar-based Gaussian Splatting for Efficient and High-Fidelity SurfaceReconstruction.IEEETransactionsonVisualizationandComputerGraph- ics31(9), 6100–6111 (2024)
work page 2024
-
[11]
Neusg: Neural implicit surface reconstruction with 3d gaussian splatting guidance, 2025
Chen, H., Li, C., Lee, G.H.: NeuSG: Neural Implicit Surface Reconstruction with 3D Gaussian Splatting Guidance. arXiv preprint arXiv:2312.00846 (2023)
-
[12]
Chen, H., Wei, F., Li, C., Huang, T., Wang, Y., Lee, G.H.: VCR-GauS: View Consistent Depth-Normal Regularizer for Gaussian Surface Reconstruction. In: Adv. Neural Inform. Process. Syst. (2024)
work page 2024
-
[13]
In: Proceedings of the eighth ACM symposium on Solid modeling and applications
Dey, T.K., Goswami, S.: Tight cocone: a water-tight surface reconstructor. In: Proceedings of the eighth ACM symposium on Solid modeling and applications. pp. 127–134. ACM (2003)
work page 2003
-
[14]
The Visual Computer 24(6), 411–422 (2008)
Dey, T.K., Levine, J.A.: Delaunay meshing of isosurfaces. The Visual Computer 24(6), 411–422 (2008)
work page 2008
-
[15]
Fridovich-Keil, S., Yu, A., Tancik, M., Chen, Q., Recht, B., Kanazawa, A.: Plenox- els: Radiance Fields without Neural Networks. In: IEEE Conf. Comput. Vis. Pat- tern Recog. pp. 5501–5510 (2022)
work page 2022
-
[16]
In: Computer Graphics International Conference
Gomez, D., Philip, J., Kaiser, A., Michel, É.: RRM: Relightable assets using Radi- ance guided Material extraction. In: Computer Graphics International Conference. pp. 17–41. Springer (2024)
work page 2024
-
[17]
Govindarajan, S., Rebain, D., Yi, K.M., Tagliasacchi, A.: Radiant Foam: Real- Time Differentiable Ray Tracing. In: Int. Conf. Comput. Vis. (2025) 18 D. Gomez et al
work page 2025
- [18]
-
[19]
Guédon, A., Lepetit, V.: SuGaR: Surface-Aligned Gaussian Splatting for Efficient 3D Mesh Reconstruction and High-Quality Mesh Rendering. In: IEEE Conf. Com- put. Vis. Pattern Recog. pp. 5354–5363 (2024)
work page 2024
-
[20]
arXiv preprint arXiv:2512.06818 (2025)
Held, J., Son, S., Vandeghen, R., Rebain, D., Gadelha, M., Zhou, Y., Cioppa, A., Lin, M.C., Van Droogenbroeck, M., Tagliasacchi, A.: MeshSplatting: Differentiable Rendering with Opaque Meshes. arXiv preprint arXiv:2512.06818 (2025)
-
[21]
In: ACM SIGGRAPH 2024 conference pa- pers
Huang, B., Yu, Z., Chen, A., Geiger, A., Gao, S.: 2D Gaussian Splatting for Ge- ometrically Accurate Radiance Fields. In: ACM SIGGRAPH 2024 conference pa- pers. pp. 1–11 (2024)
work page 2024
-
[22]
Jensen, R., Dahl, A., Vogiatzis, G., Tola, E., Aanæs, H.: Large scale multi-view stereopsis evaluation. In: IEEE Conf. Comput. Vis. Pattern Recog. pp. 406–413 (2014)
work page 2014
-
[23]
Jiang, K., Sivaram, V., Peng, C., Ramamoorthi, R.: Geometry Field Splatting with Gaussian Surfels. In: IEEE Conf. Comput. Vis. Pattern Recog. pp. 5752– 5762 (2025)
work page 2025
-
[24]
Jin, H., Liu, I., Xu, P., Zhang, X., Han, S., Bi, S., Zhou, X., Xu, Z., Su, H.: TensoIR: Tensorial Inverse Rendering. In: IEEE Conf. Comput. Vis. Pattern Recog. pp. 165– 174 (2023)
work page 2023
- [25]
-
[26]
Kheradmand, S., Rebain, D., Sharma, G., Sun, W., Tseng, Y.C., Isack, H., Kar, A., Tagliasacchi, A., Yi, K.M.: 3D gaussian splatting as markov chain monte carlo. Adv. Neural Inform. Process. Syst.37, 80965–80986 (2024)
work page 2024
-
[27]
ACM Transactions on Graphics36(4) (2017)
Knapitsch, A., Park, J., Zhou, Q.Y., Koltun, V.: Tanks and temples: Benchmarking large-scale scene reconstruction. ACM Transactions on Graphics36(4) (2017)
work page 2017
-
[28]
Li, S., Liu, Y.S., Han, Z.: Gaussianudf: Inferring unsigned distance functions through 3d gaussian splatting. In: IEEE Conf. Comput. Vis. Pattern Recog. pp. 27113–27123 (2025)
work page 2025
-
[29]
Li, Z., Müller, T., Evans, A., Taylor, R.H., Unberath, M., Liu, M.Y., Lin, C.H.: Neuralangelo: High-fidelity neural surface reconstruction. In: IEEE Conf. Comput. Vis. Pattern Recog. pp. 8456–8465 (2023)
work page 2023
-
[30]
Liang, Z., Zhang, Q., Feng, Y., Shan, Y., Jia, K.: GS-IR: 3D Gaussian Splatting for Inverse Rendering. In: IEEE Conf. Comput. Vis. Pattern Recog. pp. 21644–21653 (2024)
work page 2024
- [31]
-
[32]
Mai, A., Hedman, P., Kopanas, G., Verbin, D., Futschik, D., Xu, Q., Kuester, F., Barron, J.T., Zhang, Y.: Ever: Exact volumetric ellipsoid rendering for real-time view synthesis. In: Int. Conf. Comput. Vis. pp. 4930–4939 (2025)
work page 2025
-
[33]
Mai, A., Hedstrom, T., Kopanas, G., Kontkanen, J., Kuester, F., Barron, J.T.: Radiance Meshes for Volumetric Reconstruction (2025)
work page 2025
-
[34]
Mai, A., Verbin, D., Kuester, F., Fridovich-Keil, S.: Neural Microfacet Fields for Inverse Rendering (2023)
work page 2023
-
[35]
In: SIG- GRAPH Asia Conference Proceedings
Mallick, S.S., Goel, R., Kerbl, B., Steinberger, M., Carrasco, F.V., De La Torre, F.: Taming 3DGS: High-quality Radiance Fields with Limited Resources. In: SIG- GRAPH Asia Conference Proceedings. pp. 1–11 (2024) Gaussian Wrapping 19
work page 2024
-
[36]
Maruani, N., Klokov, R., Ovsjanikov, M., Alliez, P., Desbrun, M.: VoroMesh: Learning Watertight Surface Meshes with Voronoi Diagrams. In: Int. Conf. Com- put. Vis. pp. 14565–14574 (2023)
work page 2023
-
[37]
In: 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
Maruani,N.,Ovsjanikov,M.,Alliez,P.,Desbrun,M.:PoNQ:ANeuralQEM-Based Mesh Representation. In: 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). pp. 3647–3657 (Jun 2024)
work page 2024
-
[38]
Mildenhall, B., Srinivasan, P.P., Tancik, M., Barron, J.T., Ramamoorthi, R., Ng, R.: NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis. In: Eur. Conf. Comput. Vis. pp. 99–106 (2020)
work page 2020
-
[39]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
Miller, B., Chen, H., Lai, A., Gkioulekas, I.: Objects as Volumes: A Stochastic Geometry View of Opaque Solids. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). pp. 87–97 (June 2024)
work page 2024
- [40]
-
[41]
Munkberg, J., Hasselgren, J., Shen, T., Gao, J., Chen, W., Evans, A., Müller, T., Fidler, S.: Extracting Triangular 3D Models, Materials, and Lighting From Images. In: IEEE Conf. Comput. Vis. Pattern Recog. (2022)
work page 2022
-
[42]
In: SIGGRAPH Asia Conference Proceedings (2025)
Radl, L., Windisch, F., Deixelberger, T., Hladky, J., Steiner, M., Schmalstieg, D., Steinberger, M.: SOF: Sorted Opacity Fields for Fast Unbounded Surface Rcon- struction. In: SIGGRAPH Asia Conference Proceedings (2025)
work page 2025
-
[43]
Reiser, C., Garbin, S., Srinivasan, P.P., Verbin, D., Szeliski, R., Mildenhall, B., Barron, J.T., Hedman, P., Geiger, A.: Binary Opacity Grids: Capturing Fine Geo- metricDetailforMesh-BasedViewSynthesis.SIGGRAPHConferenceProceedings (2024)
work page 2024
-
[44]
arXiv preprint arXiv:2510.16837 (2025)
Ren, H., Yan, Q., Lu, M., Lu, R., Zhu, Z.: 2DGS-R: Revisiting the Normal Consis- tency Regularization in 2D Gaussian Splatting. arXiv preprint arXiv:2510.16837 (2025)
- [45]
-
[46]
In: Proceedings of the IEEE/CVF International Conference on Computer Vision
Son, S., Gadelha, M., Zhou, Y., Fisher, M., Xu, Z., Qiao, Y.L., Lin, M.C., Zhou, Y.: DMesh++: An Efficient Differentiable Mesh for Complex Shapes. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. pp. 26590–26599 (2025)
work page 2025
-
[47]
Advances in Neural Information Processing Systems37, 12035–12077 (2024)
Son, S., Gadelha, M., Zhou, Y., Xu, Z., Lin, M., Zhou, Y.: DMesh: A Differentiable Mesh Representation. Advances in Neural Information Processing Systems37, 12035–12077 (2024)
work page 2024
-
[48]
Sulzer, R., Landrieu, L., Marlet, R., Vallet, B.: Scalable Surface Reconstruction with Delaunay-Graph Neural Networks. In: Computer Graphics Forum. vol. 40, pp. 157–167. Wiley Online Library (2021)
work page 2021
- [49]
-
[50]
Wang, P., Liu, L., Liu, Y., Theobalt, C., Komura, T., Wang, W.: NeuS: Learning neuralimplicitsurfacesbyvolumerenderingformulti-viewreconstruction.In:Adv. Neural Inform. Process. Syst. (2021)
work page 2021
-
[51]
Yariv, L., Gu, J., Kasten, Y., Lipman, Y.: Volume rendering of neural implicit surfaces. In: Adv. Neural Inform. Process. Syst. (2021) 20 D. Gomez et al
work page 2021
-
[52]
In: ACM SIGGRAPH 2023 conference proceedings
Yariv, L., Hedman, P., Reiser, C., Verbin, D., Srinivasan, P.P., Szeliski, R., Bar- ron, J.T., Mildenhall, B.: BakedSDF: Meshing Neural SDFs for Real-Time View Synthesis. In: ACM SIGGRAPH 2023 conference proceedings. pp. 1–9 (2023)
work page 2023
-
[53]
Yu, M., Lu, T., Xu, L., Jiang, L., Xiangli, Y., Dai, B.: GSDF: 3DGS Meets SDF for Improved Rendering and Reconstruction. In: Adv. Neural Inform. Process. Syst. (2024)
work page 2024
-
[54]
Yu, Z., Chen, A., Huang, B., Sattler, T., Geiger, A.: Mip-Splatting: Alias-free 3D Gaussian Splatting. In: IEEE Conf. Comput. Vis. Pattern Recog. pp. 19447–19456 (2024)
work page 2024
-
[55]
ACM Transactions on Graphics (ToG)43(6), 1–13 (2024)
Yu, Z., Sattler, T., Geiger, A.: Gaussian opacity fields: Efficient adaptive surface reconstruction in unbounded scenes. ACM Transactions on Graphics (ToG)43(6), 1–13 (2024)
work page 2024
- [56]
-
[57]
arXiv preprint arXiv:2601.17835 (2026)
Zhang, B., Jiang, C., Li, H., Shen, S., Tan, P.: Geometry-Grounded Gaussian Splatting. arXiv preprint arXiv:2601.17835 (2026)
-
[58]
In: 2025 IEEE/CVF Conference on Com- puter Vision and Pattern Recognition (CVPR)
Zhang, C., Wang, W., Li, X., Liao, X., Su, W., Tao, W.: High-Fidelity Lightweight Mesh Reconstruction from Point Clouds. In: 2025 IEEE/CVF Conference on Com- puter Vision and Pattern Recognition (CVPR). pp. 11739–11748 (Jun 2025), iSSN: 2575-7075
work page 2025
-
[59]
Zhang, W., Liu, Y.S., Han, Z.: Neural Signed Distance Function Inference through Splatting 3D Gaussians Pulled on Zero-Level Set. In: Adv. Neural Inform. Process. Syst. (2024)
work page 2024
-
[60]
Zhang, Z., Huang, B., Jiang, H., Zhou, L., Xiang, X., Shen, S.: Quadratic Gaussian Splatting for Efficient and Detailed Surface Reconstruction. In: Int. Conf. Comput. Vis. (2025) Gaussian Wrapping 21 A Overview of the Appendix This appendix serves three purposes:(i)provide proofs for the theoretical claims made in the main paper;(ii)provide the implementa...
work page 2025
-
[61]
First, applying ray-marching (as in NeRF [38]) with the attenuation-based model should produce the same rendered image as Gaussian Splatting
-
[62]
Second, the transmittance function should reach its maximum value at the point of maximum contribution along the rayx=o+t G o,ww
-
[63]
Third,followingthedefinitionoftransmittancefromObjectsasVolumes[39], we interpret transmittance as visibility probability along a ray. Therefore, we assume an isosurface of the transmittance function for a single Gaussian should be a portion of an ellipsoid centered at the Gaussian center. We note that, transmittance having ellipsoidal isosurfaces is not ...
-
[64]
The rendered normal maps created by rasterizing the 3D Gaussian Splatting representation with normalsni
-
[65]
The image-derivative of the depth. Doing so promotes the value of our normal field at the 0.5-isosurface of the transmittance to match the true normal of the surface. Proof.First, let us start by showing why supervising the rendered normal maps—produced by splatting Gaussians with their learnable normalsni— also supervises the normal fieldN. For a given r...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.