Spatially Structured Cohesion from Extremal Alignment in Topological Active Matter
Pith reviewed 2026-05-10 18:17 UTC · model grok-4.3
The pith
Extremal alignment rules with candidate-dependent neighborhoods generate effective cohesion in topological active matter by factoring decision utilities.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
For candidate-dependent extremal alignment rules with pairwise additive utilities, the decision utility factorizes into the product of an average interaction score and the number of selected neighbors. This structure couples orientational decisions to local density, generating an effective cohesive bias without explicit cohesive forces. In metric models this drives collapse to mean-field states, but topological interactions stabilize self-confined flocks of finite extent exhibiting a rich phase diagram with polarized flocks, swarms, and persistent swirling states.
What carries the argument
The multiplicative factorization of decision utility into average interaction score times number of selected neighbors, arising when neighborhoods depend on candidate orientation in extremal alignment rules.
If this is right
- Effective cohesion arises purely from alignment rules without separate attractive interactions.
- Metric interaction models collapse to globally connected states that erase spatial structure.
- Topological interactions enable stable finite flocks in open space.
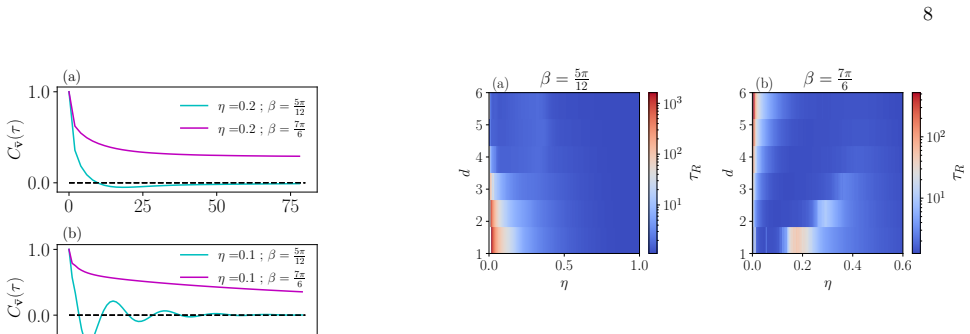
- The dynamics produce a phase diagram with transitions among polarized flocks, swarms, and swirling states controlled by noise intensity and turning rate.
Where Pith is reading between the lines
- This suggests that biological collective motion may rely on similar extremal, orientation-dependent decision rules rather than explicit cohesion forces.
- Experiments could test the mechanism by varying interaction range or neighbor count and observing changes in flock stability and density coupling.
- Similar factorization effects might appear in other decision-making systems where choice depends on the number of agreeing agents.
Load-bearing premise
That the utility exactly factorizes into average score times neighbor count when neighborhoods are chosen based on candidate orientations, and that topological fixed-neighbor rules prevent collapse while retaining structure.
What would settle it
Numerical simulations of the model with metric versus topological interactions should exhibit collapse in the former but persistent finite flocks in the latter under the same parameters.
Figures







read the original abstract
Alignment interactions in active matter are typically modeled as relaxational dynamics toward local consensus. In unbounded systems, this makes alignment effectively decoupled from local density and therefore unable to sustain self-confined collective motion without additional attractive forces. Here we show that this limitation can be overcome by extremal alignment rules in which the interaction neighborhood depends on the candidate orientation. For a broad class of candidate- dependent rules with pairwise additive utilities, the decision utility factorizes into the product of an average interaction score and the number of selected neighbors. This multiplicative structure couples orientational decisions to local density and thereby generates an effective cohesive bias without explicit cohesive forces. In metric models, however, the same mechanism drives collapse toward globally connected, effectively mean-field states that suppress spatial structure. We show that topological interactions regularize this tendency, stabilizing self-confined flocks of finite extent in open space. The resulting dynamics exhibits a rich dynamical phase diagram as a function of noise intensity and turning rate, including polarized flocks, swarms, and persistent swirling states. Our results identify candidate-dependent extremal alignment as a simple mechanism for generating cohesive, spatially structured active matter beyond the standard relaxational paradigm.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript argues that extremal alignment rules, in which the interaction neighborhood is chosen in a candidate-orientation-dependent manner, allow the decision utility to factorize exactly as U(θ) = ⟨s(θ)⟩ × |N(θ)| for any pairwise-additive utility. This multiplicative coupling of alignment score to local density produces an effective cohesive bias without explicit attractive forces. The authors further claim that topological (fixed-neighbor) interactions, unlike metric ones, regularize the tendency toward global connectivity and mean-field collapse, thereby stabilizing finite, self-confined flocks whose collective states are organized in a phase diagram parametrized by noise intensity and turning rate.
Significance. If the factorization and the topological regularization are rigorously established, the work supplies a minimal, parameter-free mechanism that converts purely orientational rules into spatially structured cohesion. This would be a substantive addition to active-matter theory, offering a route to self-confined motion that does not rely on ad-hoc attraction or confinement and that could be tested against biological or robotic swarms.
major comments (2)
- [topological regularization discussion] The section on topological versus metric interactions: the central claim that topological rules prevent mean-field collapse and sustain finite flocks rests on the assertion that candidate-dependent selection of a fixed number of neighbors cannot generate effective long-range coupling. No analytical argument is supplied showing why reorientation and motion under this rule cannot still produce global connectivity in open space; the claim appears supported only by numerical phase diagrams whose robustness to system size, initial conditions, and parameter extremes is not demonstrated.
- [factorization derivation] The derivation of the factorization U(θ) = ⟨s(θ)⟩ × |N(θ)|: while the multiplicative structure follows immediately from pairwise additivity once the neighborhood N(θ) is defined, the manuscript must explicitly verify that the candidate-dependent selection rule preserves the exact factorization without additional assumptions on the utility function or on how ties are broken when multiple orientations yield the same neighbor set.
minor comments (2)
- [notation] Notation for the average interaction score ⟨s(θ)⟩ should be defined once at first use and kept consistent across equations and figures.
- [phase diagram] The phase diagram would benefit from an explicit statement of the range of turning rates and noise intensities explored and from a quantitative measure (e.g., cluster-size distribution or correlation length) confirming that flock extent remains finite and system-size independent.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on our manuscript. The points raised have helped us clarify the presentation of the factorization and the numerical support for topological regularization. We address each major comment below.
read point-by-point responses
-
Referee: [topological regularization discussion] The section on topological versus metric interactions: the central claim that topological rules prevent mean-field collapse and sustain finite flocks rests on the assertion that candidate-dependent selection of a fixed number of neighbors cannot generate effective long-range coupling. No analytical argument is supplied showing why reorientation and motion under this rule cannot still produce global connectivity in open space; the claim appears supported only by numerical phase diagrams whose robustness to system size, initial conditions, and parameter extremes is not demonstrated.
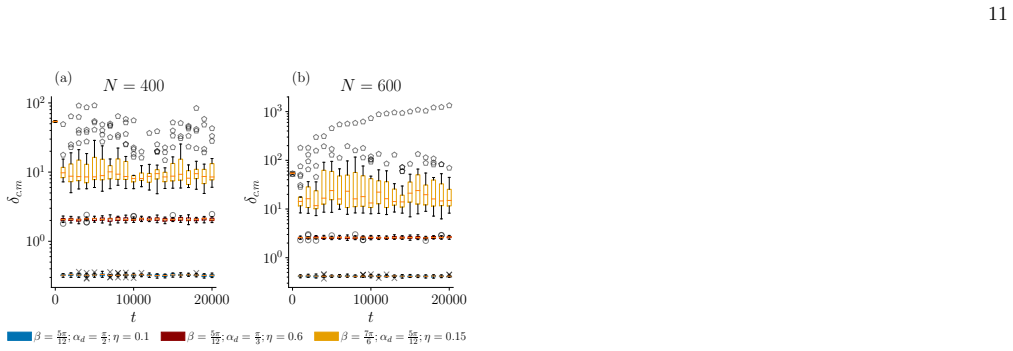
Authors: We agree that an analytical argument would provide stronger support. The non-local, configuration-dependent nature of the extremal topological selection rule makes a rigorous proof of the absence of global connectivity difficult to obtain in closed form. In the revised manuscript we have substantially expanded the relevant section with additional numerical evidence: simulations at system sizes up to N = 10 000, three classes of initial conditions (uniform random, compact clusters, and globally polarized), and wide parameter sweeps (noise intensity 0–2, turning rate 0.001–100). These runs confirm that finite, self-confined flocks persist without collapse to a single connected component, while the corresponding metric models do collapse. We have also added a qualitative discussion of how the fixed-neighbor constraint limits the effective interaction range. We therefore regard the claim as numerically substantiated, although a full analytical demonstration remains an open theoretical question. revision: partial
-
Referee: [factorization derivation] The derivation of the factorization U(θ) = ⟨s(θ)⟩ × |N(θ)|: while the multiplicative structure follows immediately from pairwise additivity once the neighborhood N(θ) is defined, the manuscript must explicitly verify that the candidate-dependent selection rule preserves the exact factorization without additional assumptions on the utility function or on how ties are broken when multiple orientations yield the same neighbor set.
Authors: We thank the referee for this observation. The factorization follows directly from the definition of the utility as a sum over the selected neighbors N(θ) and the pairwise additivity of the underlying score function; no further assumptions on the functional form are required. To make this explicit, we have inserted a short derivation in the revised Methods section (now Section II.B) that writes U(θ) = ∑_{j∈N(θ)} s_j(θ) = |N(θ)| × ⟨s(θ)⟩_{N(θ)}. For tie-breaking, the rule selects the orientation θ that maximizes the already-computed U(θ); because the factorization is evaluated independently for each candidate θ before the argmax is taken, it is preserved regardless of how ties are resolved. The revised text states these points clearly and confirms that the result holds for any pairwise-additive utility. revision: yes
- A rigorous analytical proof that candidate-dependent topological interactions necessarily preclude global connectivity and mean-field collapse in unbounded space.
Circularity Check
No circularity; derivation follows directly from model definitions
full rationale
The paper states that for candidate-dependent rules with pairwise additive utilities the decision utility factorizes into average score times neighbor count; this is an immediate algebraic consequence of the stated additivity and neighborhood choice rather than a fitted or self-referential quantity. The resulting multiplicative coupling to local density is then shown to produce effective cohesion as a direct implication of the same rules, without external data or self-citation chains. Topological interactions are contrasted with metric ones through the model dynamics themselves, yielding the phase diagram as an output of the defined equations rather than an input renamed or presupposed. No load-bearing step reduces to its own definition or to a prior self-citation.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Utilities are pairwise additive
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel (J-cost uniqueness) echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
the decision utility factorizes into the product of an average interaction score and the number of selected neighbors. This multiplicative structure couples orientational decisions to local density
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection (coupling combiner forces bilinear branch) unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
candidate-dependent extremal alignment rules... topological interactions regularize this tendency
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
- [1]
-
[2]
C. Bechinger, R. Di Leonardo, H. L¨ owen, C. Reichhardt, G. Volpe, and G. Volpe, Active particles in complex and crowded environments, Rev. Mod. Phys.88, 045006 (2016)
work page 2016
-
[3]
G. Gompper, H. A. Stone, C. Kurzthaler, D. Saintillan, F. Peruani, D. A. Fedosov, T. Auth, C. Cottin-Bizonne, C. Ybert, E. Cl´ ement, T. Darnige, A. Lindner, R. E. Goldstein, B. Liebchen, J. Binysh, A. Souslov, L. Isa, R. Di Leonardo, G. Frangipane, H. Gu, B. J. Nelson, F. Brauns, M. C. Marchetti, F. Cichos, V.-L. Heuthe, C. Bechinger, A. Korman, O. Feine...
work page 2025
-
[4]
M. Ballerini, N. Cabibbo, R. Candelier, A. Cavagna, E. Cisbani, I. Giardina, V. Lecomte, A. Orlandi, G. Parisi, A. Procaccini, M. Viale, and V. Zdravkovic, Interaction ruling animal collective behavior depends on topological rather than metric distance: Evidence from a field study, Proc. Natl. Acad. Sci. U.S.A.105, 1232 (2008)
work page 2008
-
[5]
A. Berdahl, C. J. Torney, C. C. Ioannou, J. J. Faria, and I. D. Couzin, Emergent sensing of complex environments by mobile animal groups, Science339, 574 (2013)
work page 2013
-
[6]
J. L. Silverberg, M. Bierbaum, J. P. Sethna, and I. Co- hen, Collective motion of humans in mosh and circle pits at heavy metal concerts, Phys. Rev. Lett.110, 228701 (2013)
work page 2013
- [7]
-
[8]
C. W. Reynolds, Flocks, herds and schools: A dis- tributed behavioral model, SIGGRAPH Comput. Graph. 21, 25–34 (1987)
work page 1987
- [9]
-
[10]
I. D. Couzin, J. Krause, N. R. Franks, and S. A. Levin, Effective leadership and decision-making in ani- mal groups on the move, Nature433, 513 (2005)
work page 2005
-
[11]
M. R. Shaebani, A. Wysocki, R. G. Winkler, G. Gomp- per, and H. Rieger, Computational models for active mat- ter, Nat. Rev. Phys.2, 181 (2020)
work page 2020
-
[12]
L. Barberis and F. Peruani, Large-scale patterns in a minimal cognitive flocking model: Incidental leaders, ne- matic patterns, and aggregates, Phys. Rev. Lett.117, 248001 (2016)
work page 2016
-
[13]
M. Nagy, I. Daruka, and T. Vicsek, New aspects of the continuous phase transition in the scalar noise model (snm) of collective motion, Physica A373, 445 (2007)
work page 2007
-
[14]
R. Gonz´ alez-Albaladejo, A. Carpio, and L. L. Bonilla, Scale-free chaos in the confined Vicsek flocking model, Phys. Rev. E107, 014209 (2023)
work page 2023
-
[15]
H. C. Berg and D. A. Brown, Chemotaxis in Escherichia coli analysed by three-dimensional tracking, Nature239, 500 (1972)
work page 1972
-
[16]
Dusenbery,Sensory Ecology: How Organisms Acquire and Respond to Information(W.H
D. Dusenbery,Sensory Ecology: How Organisms Acquire and Respond to Information(W.H. Freeman, 1992)
work page 1992
-
[17]
B. VanSaders, M. Fruchart, and V. Vitelli, Measurement- induced phase transitions in informational active matter, PNAS Nexus5, pgag077 (2026)
work page 2026
-
[18]
J. Giraldo-Barreto and V. Holubec, Active matter flock- ing via predictive alignment, Phys. Rev. E112, L032103 (2025)
work page 2025
-
[19]
G. R. Martin, Visual fields and their functions in birds, J. Ornithol.148, 547 (2007)
work page 2007
-
[20]
E. Fern´ andez-Juricic, J. T. Erichsen, and A. Kacelnik, Visual perception and social foraging in birds, Trends Ecol. Evol.19, 25 (2004)
work page 2004
-
[21]
H. L. Devereux and M. S. Turner, Environmental path- 12 entropy and collective motion, Phys. Rev. Lett.130, 168201 (2023)
work page 2023
-
[22]
T. B¨ auerle, R. C. L¨ offler, and C. Bechinger, Formation of stable and responsive collective states in suspensions of active colloids, Nat. Commun.11, 2547 (2020)
work page 2020
-
[23]
X. Wang, P.-C. Chen, K. Kroy, V. Holubec, and F. Ci- chos, Spontaneous vortex formation by microswimmers with retarded attractions, Nat. Commun.14, 56 (2023)
work page 2023
-
[24]
A. Cavagna, I. Giardina, and T. S. Grigera, The physics of flocking: Correlation as a compass from experiments to theory, Phys. Rep.728, 1 (2018)
work page 2018
-
[25]
A. Cavagna, D. Conti, I. Giardina, T. S. Grigera, S. Melillo, and M. Viale, Spatio-temporal correlations in models of collective motion ruled by different dynamical laws, Phys. Biol.13, 065001 (2016)
work page 2016
-
[26]
L. Rendell, R. Boyd, D. Cownden, M. Enquist, K. Eriks- son, M. W. Feldman, L. Fogarty, S. Ghirlanda, T. Lilli- crap, and K. N. Laland, Why copy others? Insights from the social learning strategies tournament, Science328, 208 (2010)
work page 2010
-
[27]
S. R. Butler, E. C. Hosinski, J. R. Lucas, and E. Fern´ andez-Juricic, Social birds copy each other’s lat- eral scans while monitoring group mates with low-acuity vision, Anim. Behav.121, 21 (2016)
work page 2016
-
[28]
H. J. Charlesworth and M. S. Turner, Intrinsically mo- tivated collective motion, Proc. Natl. Acad. Sci. U.S.A. 116, 15362 (2019)
work page 2019
-
[29]
T. Parr, G. Pezzulo, and K. J. Friston,Active Inference: The Free Energy Principle in Mind, Brain, and Behavior (The MIT Press, 2022)
work page 2022
- [30]
-
[31]
A. Lama, M. di Bernardo, and S. H. L. Klapp, Nonre- ciprocal field theory for decision-making in multi-agent control systems, Nat. Commun.16, 8450 (2025)
work page 2025
-
[32]
D. Geiß, K. Kroy, and V. Holubec, Signal propagation and linear response in the delay Vicsek model, Phys. Rev. E106, 054612 (2022)
work page 2022
-
[33]
D. Geiß, K. Kroy, and V. Holubec, Information conduc- tion and convection in noiseless Vicsek flocks, Phys. Rev. E106, 014609 (2022)
work page 2022
-
[34]
F. Ferretti, I. Giardina, T. Grigera, G. Pisegna, and M. Veca, Out-of-equilibrium response and fluctuation- dissipation violations across scales in flocking systems, Phys. Rev. Res.7, L032006 (2025)
work page 2025
-
[35]
Data for Spatially Structured Cohesion from Extremal Alignment in Topological Active Matter, doi:https:// doi.org/10.6084/m9.figshare.31950834
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.