Recognition: unknown
Stability and Sensitivity Analysis for Objective Misspecifications Among Model Predictive Game Controllers
Pith reviewed 2026-05-10 17:28 UTC · model grok-4.3
The pith
Multi-agent dynamic systems using heterogeneous model predictive game controllers remain stable under objective misspecifications, with equilibria whose sensitivity to game parameters can be quantified.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
When agents implement model predictive game controllers, misspecifications in their respective game models produce prediction misalignments that affect collective behavior, yet the multi-agent system admits stability criteria and the equilibria exhibit quantifiable sensitivity to individual agents' game parameters.
What carries the argument
Stability criteria and sensitivity measures for multi-agent dynamics under heterogeneous model predictive game controllers with objective misspecifications.
If this is right
- The stability criteria provide a direct test for whether a given collection of model predictive game controllers will produce convergent behavior.
- Sensitivity quantification identifies which changes in an agent's objective parameters produce the largest shifts in the overall equilibrium.
- The analysis framework applies to any multi-agent setting in which agents solve finite-horizon games repeatedly to generate control actions.
- Designers can use the sensitivity results to prioritize accurate estimation of the most influential game parameters.
Where Pith is reading between the lines
- The same sensitivity approach could be applied to study how learning or adaptation in one agent's objective model propagates through the system.
- The criteria might be combined with robust-control techniques to design controllers that explicitly hedge against bounded misspecification.
- Numerical verification on standard benchmark multi-agent dynamics would make the stability conditions immediately usable in engineering practice.
Load-bearing premise
Objective misspecifications are compatible with the system dynamics in a form that still permits explicit stability criteria to be stated.
What would settle it
A concrete multi-agent example or simulation in which the proposed stability criteria are satisfied yet the closed-loop trajectories diverge would falsify the central claim.
Figures






read the original abstract
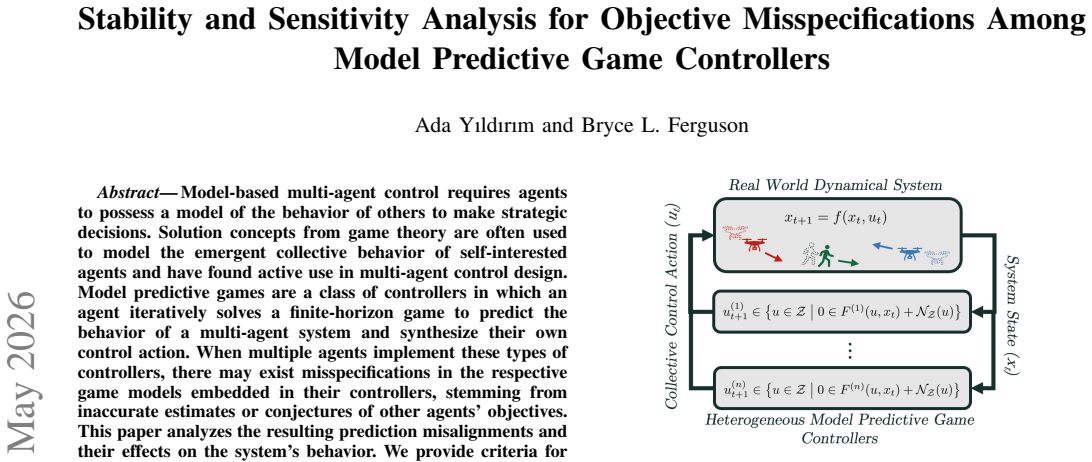
Model-based multi-agent control requires agents to possess a model of the behavior of others to make strategic decisions. Solution concepts from game theory are often used to model the emergent collective behavior of self-interested agents and have found active use in multi-agent control design. Model predictive games are a class of controllers in which an agent iteratively solves a finite-horizon game to predict the behavior of a multi-agent system and synthesize their own control action. When multiple agents implement these types of controllers, there may exist misspecifications in the respective game models embedded in their controllers, stemming from inaccurate estimates or conjectures of other agents' objectives. This paper analyzes the resulting prediction misalignments and their effects on the system's behavior. We provide criteria for the stability of multi-agent dynamic systems with heterogeneous model predictive game controllers, and quantify the sensitivity of the equilibria to individual agents' game parameters.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper examines multi-agent dynamic systems in which agents employ heterogeneous model predictive game controllers that may contain misspecifications in their embedded models of other agents' objectives. It derives stability criteria for the resulting closed-loop behavior and provides quantitative sensitivity measures of the emergent equilibria with respect to perturbations in individual agents' game parameters.
Significance. If the stability criteria and sensitivity quantifications are rigorously established, the work would offer practical tools for assessing robustness in multi-agent MPC designs under imperfect information, with potential relevance to applications such as traffic coordination and robotic swarms. The explicit treatment of objective misspecifications distinguishes it from standard game-theoretic MPC analyses that assume perfect alignment.
major comments (2)
- [§3.2] §3.2, Theorem 1: the stability criterion is stated in terms of a contraction mapping on the joint state trajectory, but the proof sketch relies on a uniform Lipschitz bound that is not shown to hold uniformly across heterogeneous misspecification levels; a counter-example or explicit bound derivation is needed to confirm the claim is not vacuous.
- [§4.1] §4.1, Eq. (22): the sensitivity matrix is obtained via implicit differentiation of the equilibrium condition, yet the paper does not verify that the Jacobian remains nonsingular under the misspecification perturbations considered in Assumption 3; without this, the sensitivity quantification may be undefined at points of interest.
minor comments (2)
- [§2] Notation for the game parameters (e.g., θ_i) is introduced inconsistently between the abstract and §2; a single definition table would improve readability.
- [Figure 3] Figure 3 caption does not specify the misspecification magnitude used in the simulation; this makes it difficult to reproduce the sensitivity curves.
Simulated Author's Rebuttal
We thank the referee for their constructive comments on our manuscript analyzing stability and sensitivity in multi-agent systems with heterogeneous model predictive game controllers under objective misspecifications. The feedback highlights areas where additional rigor is needed in the proofs. We address each major comment point by point below and will incorporate revisions to strengthen the paper.
read point-by-point responses
-
Referee: [§3.2] §3.2, Theorem 1: the stability criterion is stated in terms of a contraction mapping on the joint state trajectory, but the proof sketch relies on a uniform Lipschitz bound that is not shown to hold uniformly across heterogeneous misspecification levels; a counter-example or explicit bound derivation is needed to confirm the claim is not vacuous.
Authors: We acknowledge that the proof sketch for Theorem 1 relies on a uniform Lipschitz bound for the contraction mapping without an explicit derivation showing uniformity across heterogeneous misspecification levels. We will revise the manuscript to include a detailed derivation of this bound. The bound follows from the compactness of the misspecification parameter set (as agents' objective models are drawn from a bounded family) combined with the uniform Lipschitz continuity of the finite-horizon game equilibrium mapping with respect to parameters, which holds by standard results on parametric variational inequalities. This will confirm that the contraction condition in Theorem 1 is non-vacuous under the paper's assumptions. We will also add a brief remark clarifying the role of bounded heterogeneity. revision: yes
-
Referee: [§4.1] §4.1, Eq. (22): the sensitivity matrix is obtained via implicit differentiation of the equilibrium condition, yet the paper does not verify that the Jacobian remains nonsingular under the misspecification perturbations considered in Assumption 3; without this, the sensitivity quantification may be undefined at points of interest.
Authors: We agree that an explicit verification of Jacobian nonsingularity is required for the sensitivity matrix in Eq. (22) to be well-defined under the perturbations in Assumption 3. The current manuscript applies the implicit function theorem at the nominal equilibrium but does not address perturbations. In the revision, we will add a supporting result (e.g., a lemma) showing that the Jacobian of the equilibrium map remains nonsingular for sufficiently small misspecification perturbations by continuity of the map and nonsingularity at zero misspecification. If needed, we will augment Assumption 3 with a mild regularity condition to ensure this property. revision: yes
Circularity Check
No significant circularity; derivation appears self-contained
full rationale
The paper claims to derive stability criteria for multi-agent systems under heterogeneous model predictive game controllers with objective misspecifications, plus sensitivity quantification of equilibria to game parameters. No load-bearing step reduces by construction to its inputs: stability criteria are stated as general conditions (likely via Lyapunov or contraction arguments on the closed-loop map), and sensitivity is obtained via implicit differentiation or perturbation analysis at equilibrium. The abstract and description contain no self-definitional loops, fitted inputs renamed as predictions, or self-citation chains that justify the central claims. The derivation chain is independent of the target results and relies on standard dynamic systems analysis without smuggling ansatzes or renaming known patterns. This is the expected honest non-finding for a paper whose core contributions are analytical criteria rather than data-driven fits.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
An Efficient Risk- aware Branch MPC for Automated Driving that is Robust to Uncertain Vehicle Behaviors,
L. Zhang, G. Pantazis, S. Han, and S. Grammatico, “An Efficient Risk- aware Branch MPC for Automated Driving that is Robust to Uncertain Vehicle Behaviors,” in2024 IEEE 63rd Conference on Decision and Control (CDC), Dec. 2024, pp. 8207–8212, iSSN: 2576-2370
2024
-
[2]
Strategizing at Speed: A Learned Model Predictive Game for Multi- Agent Drone Racing,
A.-C. Papuc, L. Peters, S. Sun, L. Ferranti, and J. Alonso-Mora, “Strategizing at Speed: A Learned Model Predictive Game for Multi- Agent Drone Racing,” Feb. 2026, arXiv:2602.06925 [cs]
-
[3]
Demand-Side Management via Distributed Energy Generation and Storage Optimization,
I. Atzeni, L. G. Ordonez, G. Scutari, D. P. Palomar, and J. R. Fonol- losa, “Demand-Side Management via Distributed Energy Generation and Storage Optimization,”IEEE Transactions on Smart Grid, vol. 4, no. 2, pp. 866–876, Jun. 2013
2013
-
[4]
Basar and G
T. Basar and G. Olsder,Dynamic Noncooperative Game Theory, ser. Classics in Applied Mathematics. Society for Industrial and Applied Mathematics, 1999
1999
-
[5]
Rawlings, D
J. Rawlings, D. Mayne, and M. Diehl,Model Predictive Control: Theory, Computation, and Design. Nob Hill Publishing, 2020
2020
-
[6]
Efficient Iterative Linear-Quadratic Approximations for Non- linear Multi-Player General-Sum Differential Games,
D. Fridovich-Keil, E. Ratner, L. Peters, A. D. Dragan, and C. J. Tomlin, “Efficient Iterative Linear-Quadratic Approximations for Non- linear Multi-Player General-Sum Differential Games,” in2020 IEEE International Conference on Robotics and Automation (ICRA), May 2020, pp. 1475–1481, iSSN: 2577-087X
2020
-
[7]
Stability Certificates for Receding Horizon Games,
S. Hall, G. Belgioioso, F. D ¨orfler, and D. Liao-McPherson, “Stability Certificates for Receding Horizon Games,”IEEE Transactions on Automatic Control, pp. 1–8, 2025
2025
-
[8]
Linear-Quadratic Dynamic Games as Receding-Horizon Variational Inequalities,
E. Benenati and S. Grammatico, “Linear-Quadratic Dynamic Games as Receding-Horizon Variational Inequalities,”IEEE Transactions on Automatic Control, pp. 1–16, 2025
2025
-
[9]
Game-to-Real Gap: Quantifying the Effect of Model Misspecification in Network Games,
B. L. Ferguson, C. Maheshwari, M. Wu, and S. Sastry, “Game-to-Real Gap: Quantifying the Effect of Model Misspecification in Network Games,” Jan. 2026, arXiv:2601.16367 [cs]
-
[10]
Multi-Agent Reinforcement Learning: A Selective Overview of Theories and Algorithms, April 2021
K. Zhang, Z. Yang, and T. Bas ¸ar, “Multi-Agent Reinforcement Learn- ing: A Selective Overview of Theories and Algorithms,” Apr. 2021, arXiv:1911.10635 [cs]
-
[11]
H. I. Khan, J. Li, and D. Fridovich-Keil, “What Do Agents Think One Another Want? Level-2 Inverse Games for Inferring Agents’ Estimates of Others’ Objectives,” Oct. 2025, arXiv:2508.03824 [cs]
-
[12]
A generalized Nash equilibrium approach for optimal control problems of autonomous cars,
A. Dreves and M. Gerdts, “A generalized Nash equilibrium approach for optimal control problems of autonomous cars,”Optimal Control Applications and Methods, vol. 39, no. 1, pp. 326–342, 2018, eprint: https://onlinelibrary.wiley.com/doi/pdf/10.1002/oca.2348
-
[13]
Energy Trading and Generalized Nash Equilibrium in Combined Heat and Power Market,
C. Wu, W. Gu, R. Bo, H. MehdipourPicha, P. Jiang, Z. Wu, S. Lu, and S. Yao, “Energy Trading and Generalized Nash Equilibrium in Combined Heat and Power Market,”IEEE Transactions on Power Systems, vol. 35, no. 5, pp. 3378–3387, Sep. 2020
2020
-
[14]
Fudenberg and J
D. Fudenberg and J. Tirole,Game Theory. MIT Press, Aug. 1991, google-Books-ID: pFPHKwXro3QC
1991
-
[15]
Facchinei and J.-S
F. Facchinei and J.-S. Pang, Eds.,Finite-Dimensional Variational Inequalities and Complementarity Problems, ser. Springer Series in Operations Research and Financial Engineering. New York, NY: Springer, 2004
2004
-
[16]
H. H. Bauschke and P. L. Combettes,Convex Analysis and Monotone Operator Theory in Hilbert Spaces, ser. CMS Books in Mathematics. Cham: Springer International Publishing, 2017
2017
-
[17]
On linear quadratic potential games,
S. Hosseinirad, G. Salizzoni, A. A. Porzani, and M. Kamgarpour, “On linear quadratic potential games,”Automatica, vol. 183, p. 112643, Jan. 2026
2026
-
[18]
Active Inverse Learning in Stackelberg Trajectory Games,
W. Ward, Y . Yu, J. Levy, N. Mehr, D. Fridovich-Keil, and U. Topcu, “Active Inverse Learning in Stackelberg Trajectory Games,” Oct. 2024, arXiv:2308.08017 [cs]
-
[19]
PACE: a framework for learning and control in linear incomplete-information differential games,
S. Y . Soltanian and W. Zhang, “PACE: a framework for learning and control in linear incomplete-information differential games,”arXiv preprint arXiv:2504.17128, 2025
-
[20]
The explicit game-theoretic linear quadratic regulator for constrained multi-agent systems
E. Benenati and G. Belgioioso, “The explicit game-theoretic linear quadratic regulator for constrained multi-agent systems,” Dec. 2025, arXiv:2512.07749 [eess]
work page internal anchor Pith review arXiv 2025
-
[21]
Game- Theoretic Planning for Self-Driving Cars in Multivehicle Competitive Scenarios,
M. Wang, Z. Wang, J. Talbot, J. C. Gerdes, and M. Schwager, “Game- Theoretic Planning for Self-Driving Cars in Multivehicle Competitive Scenarios,”IEEE Transactions on Robotics, vol. 37, no. 4, pp. 1313– 1325, Aug. 2021
2021
-
[22]
Sensitivity analysis for variational inequalities,
R. L. Tobin, “Sensitivity analysis for variational inequalities,”Journal of Optimization Theory and Applications, vol. 48, no. 1, pp. 191–204, Jan. 1986
1986
-
[23]
Stability and Dissipativity The- ory for Discrete-Time Nonlinear Dynamical Systems,
W. M. Haddad and V . Chellaboina, “Stability and Dissipativity The- ory for Discrete-Time Nonlinear Dynamical Systems,” inNonlinear Dynamical Systems and Control. Princeton: University Press, 2019, pp. 763–844. APPENDIX Proof of Theorem 1.The proof is constructed of five parts, first identifying block elements of the system, then analyzing their networked...
2019
-
[24]
Definition of feedback system blocks:The feedback system blocks for the closed-loop system in (7) are visualized in Figure 6. The system blocks are of two kinds:Ψ 0 as the LTI system in (3) representing the multi-agent dynamics and the collection ofΨ j’s being the joint control action feedback composed of each agent’s individual MPG controller defined by ...
-
[25]
The mappingh(x) = (I−A) −1Bκ(x) is defined, and the following conditions are checked to conclude the existence of at least one fixed point
Existence of a dynamical system equilibrium:We start by considering the set of equilibrium points of the closed- loop dynamical system in (7) given byE={¯x|¯x= A¯x+Bκ(¯x)}. The mappingh(x) = (I−A) −1Bκ(x) is defined, and the following conditions are checked to conclude the existence of at least one fixed point. (i)h(x) is single-valued: Through Assumption...
-
[26]
∆u(j) t ∆c(j) t #⊤ −ρiI 1 2 I ⋆0
Inequalities for dissipativity and input-output relations: Dissipation inequalities with storage functions are derived for each main subsystem block, namely,V 0 andV i’s for each subsystemΨ 0 andΨ i’s separately. The following are defined: ∆zt = (zt −¯z),∆yt = (yt −¯y),∆u(j) t = (u(j) t −¯u(j) t ), and ∆c(j) t = (c(j) t −¯c(j) t ). AsΨ 0 is a discrete-tim...
-
[27]
Connection of main blocksΨ 0 andΨ i’s:Next, the connection between the two main dissipativity blocks are applied through the interconnection equations given as: ∆zt = X j∈N BjΞj∆u(j) t ,∆c (j) t =−F (j) x ∆yt.(19) By substituting the interconnection equations into the storage function inequalities and adding them altogether, we can write the overall inequ...
-
[28]
Conditions (i)V ¯x(¯x) = 0, (ii) V¯x(x)>0,∀x∈R nx \ {¯x}, (iii)V¯x(x)→ ∞as∥x∥ → ∞: are satisfied as a quadratic storage function is selected
Stability of the overall system:The discrete-time Lya- punov theorem [23] is applied to show the closed-loop stability of the overall system. Conditions (i)V ¯x(¯x) = 0, (ii) V¯x(x)>0,∀x∈R nx \ {¯x}, (iii)V¯x(x)→ ∞as∥x∥ → ∞: are satisfied as a quadratic storage function is selected. (iv) V¯x(f(x))−V ¯x(x)<0,∀x∈R nx: is satisfied as the decrease condition ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.