Recognition: no theorem link
Explainable Planning for Hybrid Systems
Pith reviewed 2026-05-15 19:35 UTC · model grok-4.3
The pith
Explainable planning methods can be built for hybrid systems that model real-world problems with continuous and discrete elements.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes that explainable artificial intelligence planning approaches can be extended to hybrid systems, delivering both valid plans and explanations in settings that capture real-world dynamics more closely than discrete-only models.
What carries the argument
XAIP methods adapted for hybrid systems that combine discrete and continuous variables to support simultaneous planning and explanation generation.
Load-bearing premise
The developed XAIP approaches remain effective and applicable to hybrid systems in practice without reducing planning performance.
What would settle it
A concrete test in which an XAIP planner for a hybrid system such as autonomous vehicle routing either fails to produce a valid plan or fails to produce an explanation while a standard planner succeeds on the same instance.
Figures





































read the original abstract
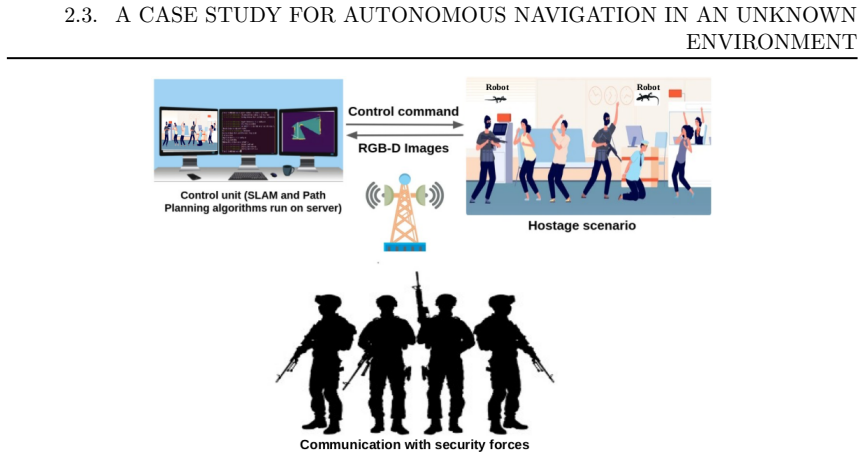
The recent advancement in artificial intelligence (AI) technologies facilitates a paradigm shift toward automation. Autonomous systems are fully or partially replacing manually crafted ones. At the core of these systems is automated planning. With the advent of powerful planners, automated planning is now applied to many complex and safety-critical domains, including smart energy grids, self-driving cars, warehouse automation, urban and air traffic control, search and rescue operations, surveillance, robotics, and healthcare. There is a growing need to generate explanations of AI-based systems, which is one of the major challenges the planning community faces today. The thesis presents a comprehensive study on explainable artificial intelligence planning (XAIP) for hybrid systems that capture a representation of real-world problems closely.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a comprehensive study on explainable artificial intelligence planning (XAIP) for hybrid systems. It emphasizes the application of automated planning in complex, safety-critical domains such as smart energy grids, self-driving cars, warehouse automation, urban and air traffic control, search and rescue, surveillance, robotics, and healthcare, while addressing the growing need for explanations of AI-based systems in these areas.
Significance. If the XAIP approaches developed prove effective for hybrid systems without compromising planning performance, the work could advance explainability in automated planning for real-world applications. The emphasis on hybrid systems that closely model practical problems offers potential for improved trust and safety in autonomous systems, provided concrete methods and evaluations are demonstrated.
major comments (1)
- [Abstract] Abstract: The central claim of a 'comprehensive study' on XAIP methods for hybrid systems cannot be evaluated, as no specific approaches, algorithms, derivations, experimental results, or performance metrics are provided to support assertions of effectiveness and applicability.
Simulated Author's Rebuttal
We thank the referee for their review of our manuscript on explainable planning for hybrid systems. We address the major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim of a 'comprehensive study' on XAIP methods for hybrid systems cannot be evaluated, as no specific approaches, algorithms, derivations, experimental results, or performance metrics are provided to support assertions of effectiveness and applicability.
Authors: The abstract is intentionally concise to summarize the thesis scope. The full manuscript details the specific XAIP approaches for hybrid systems, including algorithms for explanation generation, formal derivations of the methods, and experimental results with performance metrics on domains such as smart energy grids, robotics, and traffic control. The 'comprehensive study' claim refers to the breadth of the work presented in the body of the paper. We can revise the abstract to briefly reference key methods and evaluation outcomes if this improves clarity. revision: partial
Circularity Check
No circularity detected; derivation chain not present in available text
full rationale
The provided abstract and context describe a comprehensive study on XAIP methods for hybrid systems without any equations, derivations, fitted parameters, predictions, or self-citations that could reduce to inputs by construction. No load-bearing steps of the enumerated kinds are identifiable, so the work is treated as self-contained conceptual research rather than a closed mathematical chain.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Jiaming Zha and Mark W. Mueller. Exploiting collisions for sampling-based multicopter motion planning. InIEEE International Conference on Robotics and Automation, ICRA 2021, Xi’an, China, May 30 - June 5, 2021, pages 7943–7949. IEEE,
work page 2021
-
[2]
doi: 10.1109/ICRA48506.2021.9561166. URLhttps://doi.org/10.1109/ICRA48506. 2021.9561166. 22 Yu Zhang, Sarath Sreedharan, Anagha Kulkarni, Tathagata Chakraborti, Hankz Hankui Zhuo, and Subbarao Kambhampati. Plan explicability and predictability for robot task planning. In2017 IEEE International Conference on Robotics and Automation (ICRA), pages 1313–1320,
-
[3]
91 Ellin Zhao and Roykrong Sukkerd
doi: 10.1109/ICRA.2017.7989155. 91 Ellin Zhao and Roykrong Sukkerd. Interactive explanation for planning-based systems: WIP abstract. In Xue Liu, Paulo Tabuada, Miroslav Pajic, and Linda Bushnell, ed- itors,Proceedings of the 10th ACM/IEEE International Conference on Cyber-Physical Systems, ICCPS 2019, Montreal, QC, Canada, April 16-18, 2019, pages 322–323. ACM,
-
[4]
URLhttps://doi.org/10.1145/3302509
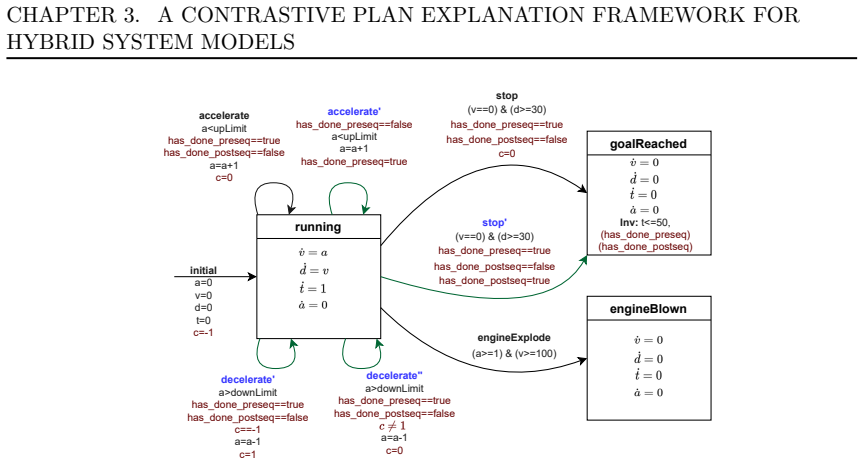
doi: 10.1145/3302509.3313322. URLhttps://doi.org/10.1145/3302509. 3313322. 12 166 Chapter 8 Appendix 8.1 Car Domain ( d e f i n e ( problem car_prob ) ( : domain c a r ) ( : i n i t ( r u n n i n g ) (= ( runningTime ) 0 ) (= ( upLimit ) 2 ) (= ( downLimit )−2) (= d 0 ) (= a 0 ) (= v 0 ) ) ( : g o a l ( and ( g o a l R e a c h e d ) ( not ( engineBlown ) ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.