Robust Energy-Aware Routing for Air-Ground Cooperative Multi-UAV Delivery in Wind-Uncertain Environments
Pith reviewed 2026-05-10 13:26 UTC · model grok-4.3
The pith
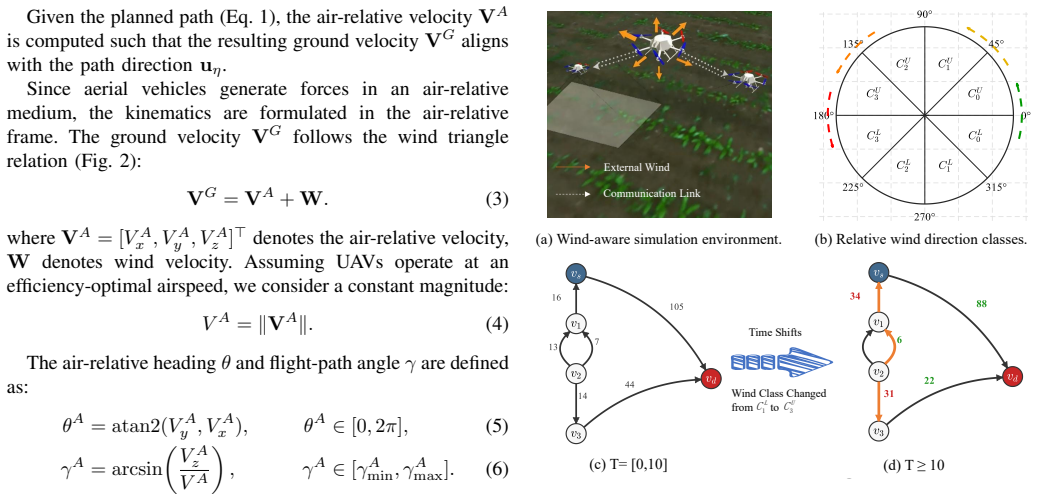
Battery-Efficient Routing plans UAV paths on time-dependent energy graphs to maintain return feasibility under shifting winds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that modeling the delivery problem as routing on a time-dependent energy graph whose edge costs evolve according to wind-induced aerodynamic effects, then continuously evaluating return feasibility while balancing instantaneous energy use and uncertainty-aware risk, produces markedly higher mission success rates and fewer wind-induced failures than static or greedy baselines.
What carries the argument
The time-dependent energy graph whose edge costs evolve according to wind-induced aerodynamic effects, which enables the online risk-sensitive planner to assess return feasibility at each step.
If this is right
- BER can be placed inside a hierarchical aerial-ground architecture that performs task allocation, routing, and decentralized trajectory execution.
- Mission success rates rise and wind-induced failures drop relative to static and greedy planners.
- The same risk-sensitive evaluation can be applied whenever energy budgets must be checked under partial environmental information.
Where Pith is reading between the lines
- Live wind sensors fed into the graph could shrink the partial-observability gap that the current risk term must cover.
- The approach may apply to other vehicles whose energy draw varies with time-changing external forces such as currents or terrain slope.
- Extending the graph to include temperature or payload effects would be a direct next step within the same modeling structure.
Load-bearing premise
The time-dependent energy graph and risk evaluation accurately capture real aerodynamic effects from partially observable, time-varying winds, and the synthetic environments plus quasi-real wind logs represent actual flight conditions.
What would settle it
A real-world trial with instrumented UAVs under measured varying winds in which the observed mission completion and failure rates diverge from the rates predicted by the BER planner on the same wind logs.
Figures
read the original abstract
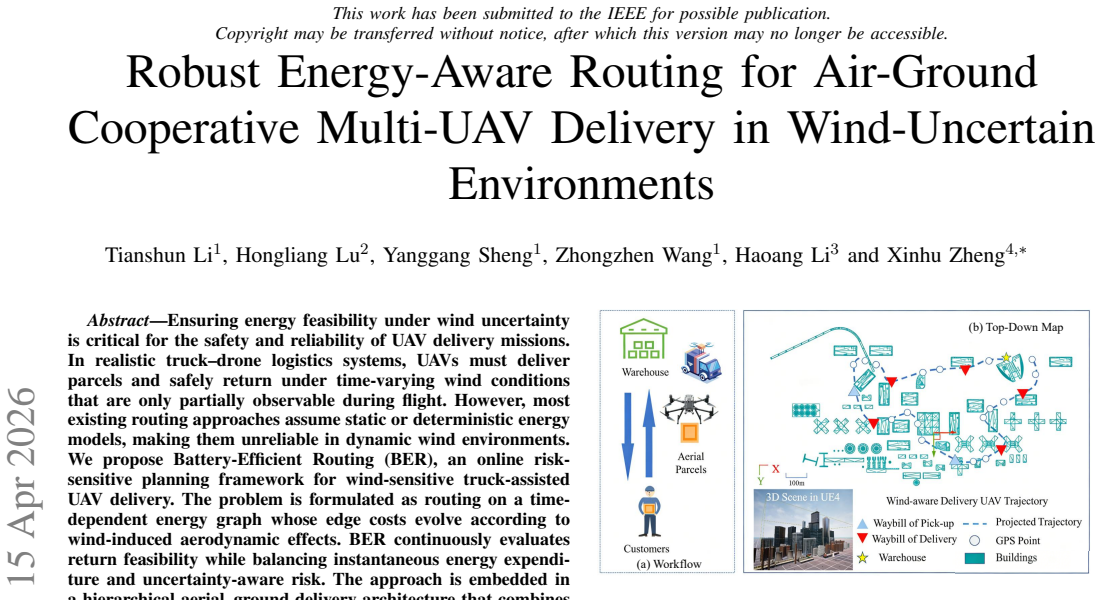
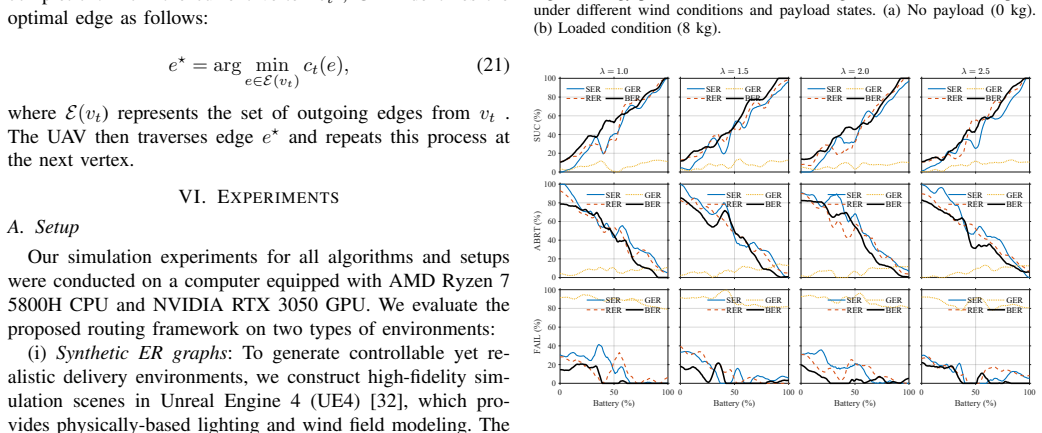
Ensuring energy feasibility under wind uncertainty is critical for the safety and reliability of UAV delivery missions. In realistic truck-drone logistics systems, UAVs must deliver parcels and safely return under time-varying wind conditions that are only partially observable during flight. However, most existing routing approaches assume static or deterministic energy models, making them unreliable in dynamic wind environments. We propose Battery-Efficient Routing (BER), an online risk-sensitive planning framework for wind-sensitive truck-assisted UAV delivery. The problem is formulated as routing on a time dependent energy graph whose edge costs evolve according to wind-induced aerodynamic effects. BER continuously evaluates return feasibility while balancing instantaneous energy expenditure and uncertainty-aware risk. The approach is embedded in a hierarchical aerial-ground delivery architecture that combines task allocation, routing, and decentralized trajectory execution. Extensive simulations on synthetic ER graphs generated in Unreal Engine environments and quasi-real wind logs demonstrate that BER significantly improves mission success rates and reduces wind-induced failures compared with static and greedy baselines. These results highlight the importance of integrating real-time energy budgeting and environmental awareness for UAV delivery planning under dynamic wind conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Battery-Efficient Routing (BER), an online risk-sensitive planning framework for air-ground cooperative multi-UAV delivery under wind uncertainty. The problem is formulated as routing on a time-dependent energy graph whose edge costs evolve with wind-induced aerodynamic effects; BER continuously evaluates return feasibility while balancing energy expenditure and uncertainty-aware risk. It is embedded in a hierarchical architecture combining task allocation, routing, and decentralized trajectory execution. Simulations on synthetic ER graphs in Unreal Engine with quasi-real wind logs are reported to show that BER significantly improves mission success rates and reduces wind-induced failures relative to static and greedy baselines.
Significance. If the time-dependent energy graph accurately captures real aerodynamic behavior under partial wind observability, the work could advance reliable UAV logistics by demonstrating the value of real-time energy budgeting and risk awareness in dynamic environments. The hierarchical architecture and use of external wind logs plus Unreal Engine for reproducibility are strengths. However, the simulation-only evaluation without real-flight data or sensitivity analysis limits the immediate impact and generalizability of the claimed gains.
major comments (2)
- [Evaluation] Evaluation section: The abstract and results claim that BER 'significantly improves mission success rates and reduces wind-induced failures' but supply no quantitative values for the improvements, no error bars, no statistical tests, and no details on baseline implementations. This prevents verification of the central performance claim.
- [Problem formulation and method] Problem formulation and method sections: The edge costs in the time-dependent energy graph are computed from wind-induced aerodynamic effects under partial observability, yet no ablation on wind-sensing noise levels and no sensitivity analysis to drag-model parameters are reported. These omissions are load-bearing because the reported advantage of risk-sensitive planning over baselines disappears if the modeled energy consumption deviates from physical UAV behavior.
minor comments (1)
- [Abstract] The abstract would benefit from including at least one concrete performance metric (e.g., success-rate delta or failure reduction percentage) to convey the magnitude of the reported gains.
Simulated Author's Rebuttal
We thank the referee for the thorough and constructive review of our manuscript. The feedback highlights important aspects of clarity in reporting and robustness analysis. We address each major comment point by point below and commit to revisions that strengthen the paper without misrepresenting the simulation-based nature of the evaluation.
read point-by-point responses
-
Referee: [Evaluation] Evaluation section: The abstract and results claim that BER 'significantly improves mission success rates and reduces wind-induced failures' but supply no quantitative values for the improvements, no error bars, no statistical tests, and no details on baseline implementations. This prevents verification of the central performance claim.
Authors: We agree that explicit quantification strengthens verifiability. Although comparative results appear in the figures of the results section, the text does not tabulate mean success rates, standard deviations across runs, or statistical tests. In the revised version we will insert a dedicated results table listing quantitative improvements (e.g., success-rate deltas versus each baseline), error bars derived from repeated trials, implementation details for the static and greedy baselines, and paired t-test p-values to support the significance statements. revision: yes
-
Referee: [Problem formulation and method] Problem formulation and method sections: The edge costs in the time-dependent energy graph are computed from wind-induced aerodynamic effects under partial observability, yet no ablation on wind-sensing noise levels and no sensitivity analysis to drag-model parameters are reported. These omissions are load-bearing because the reported advantage of risk-sensitive planning over baselines disappears if the modeled energy consumption deviates from physical UAV behavior.
Authors: We concur that sensitivity to modeling assumptions is essential for credibility. The present formulation employs a standard quadratic drag model and quasi-real wind logs; however, no explicit noise-ablation or parameter-sweep results are included. For the revision we will add an ablation subsection that varies wind-sensing noise (zero-mean Gaussian at 0 %, 10 %, and 20 % levels) and perturbs drag coefficients across a realistic interval. Performance deltas of BER versus baselines will be reported under each setting, allowing readers to assess whether the risk-sensitive advantage persists under plausible model deviations. revision: yes
Circularity Check
No circularity; claims rest on external simulation inputs
full rationale
The provided abstract formulates the problem as routing on a time-dependent energy graph with edge costs from wind-induced effects and evaluates BER via simulations on synthetic ER graphs in Unreal Engine plus quasi-real wind logs. No equations, self-citations, fitted parameters, or ansatzes are shown that reduce the performance claims to the inputs by construction. Comparisons to static/greedy baselines use independent external environments, satisfying the self-contained criterion.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
S. Hu, B. Li, and R. Zhang, “Multi-drone-truck collaborative delivery with en route operations: A hierarchical marl-based approach,”2025 IEEE International Conference on Robotics and Automation (ICRA), pp. 12 993–12 999, 2025. [Online]. Available: https://api.semanticscholar.org/CorpusID:281093768
work page 2025
-
[2]
Learning-based cooperative mobility control for autonomous drone-delivery,
S. Park, C. Y . Park, and J. Kim, “Learning-based cooperative mobility control for autonomous drone-delivery,”IEEE Transactions on Vehicular Technology, vol. 73, pp. 4870–4885, 2024. [Online]. Available: https://api.semanticscholar.org/CorpusID:265164677
work page 2024
-
[3]
Uav assisted truck delivery route optimization via reinforcement learning,
Y . Xu, H. Ma, D. Zhao, Q. Deng, and Z. Liu, “Uav assisted truck delivery route optimization via reinforcement learning,” inInternational Conference on Algorithms, Mi- crochips and Network Applications, 2025. [Online]. Available: https://api.semanticscholar.org/CorpusID:278731744
work page 2025
-
[4]
A. Arishi and P. Ahuja, “Multi-agent reinforcement learning for truck–drone routing in smart logistics: A comprehensive review,”Com- puters Electrical Engineering, vol. 127, no. PartA, 2025
work page 2025
-
[5]
The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery,
C. C. Murray and A. Chu, “The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery,”Transportation Research Part C-emerging Technologies, vol. 54, pp. 86–109, 2015. [Online]. Available: https://api.semanticscholar.org/CorpusID:8846258
work page 2015
-
[6]
Energy efficient uav flight control method in an environment with obstacles and gusts of wind,
M. Chodnicki, B. Siemiatkowska, and W. Stecz, “Energy efficient uav flight control method in an environment with obstacles and gusts of wind,”Energies, vol. 15, no. 10, p. 3730, 2022
work page 2022
-
[7]
Wind estimation with multirotor uavs,
K. Meier, R. Hann, J. Skaloud, and A. Garreau, “Wind estimation with multirotor uavs,”Atmosphere, vol. 13, no. 4, p. 551, 2022
work page 2022
-
[8]
Truck-drone delivery optimization based on multi-agent reinforcement learning,
Z. Bi, X. Guo, J. Wang, S. Qin, and G. Liu, “Truck-drone delivery optimization based on multi-agent reinforcement learning,”Drones, 2024. [Online]. Available: https://api.semanticscholar.org/CorpusID:267103096
work page 2024
-
[9]
Reinforcement learning based truck-and-drone coordinated delivery,
G. Wu, M. Fan, J. Shi, and Y . Feng, “Reinforcement learning based truck-and-drone coordinated delivery,”IEEE Transactions on Artificial Intelligence, vol. 4, pp. 754–763, 2021. [Online]. Available: https://api.semanticscholar.org/CorpusID:237814941
work page 2021
-
[10]
Energy-optimized planning in non-uniform wind fields with fixed-wing aerial vehicles,
Y . Duan, F. Achermann, J. Lim, and R. Siegwart, “Energy-optimized planning in non-uniform wind fields with fixed-wing aerial vehicles,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 3116–3122
work page 2024
-
[11]
W.-C. Chiang, Y . Li, J. Shang, and T. L. Urban, “Impact of drone delivery on sustainability and cost: Realizing the uav potential through vehicle routing optimization,”Applied energy, vol. 242, pp. 1164–1175, 2019
work page 2019
-
[12]
An overview of various kinds of wind effects on unmanned aerial vehicle,
B. H. Wang, D. B. Wang, Z. A. Ali, B. Ting Ting, and H. Wang, “An overview of various kinds of wind effects on unmanned aerial vehicle,” Measurement and Control, vol. 52, no. 7-8, pp. 731–739, 2019
work page 2019
-
[13]
Target allocation and air–ground coordina- tion for uav cluster airspace security defense,
C. shou Deng and X. Fang, “Target allocation and air–ground coordina- tion for uav cluster airspace security defense,”Drones, 2025. [Online]. Available: https://api.semanticscholar.org/CorpusID:282978382
work page 2025
-
[14]
Trajectory generation and control for precise aggressive maneuvers with quadrotors,
D. Mellinger, N. Michael, and V . Kumar, “Trajectory generation and control for precise aggressive maneuvers with quadrotors,”The Interna- tional Journal of Robotics Research, vol. 31, no. 5, pp. 664–674, 2012
work page 2012
-
[15]
Energy-efficient uav communications under stochastic trajectory: A markov decision process approach,
D. Han, W. Chen, and J. Liu, “Energy-efficient uav communications under stochastic trajectory: A markov decision process approach,”IEEE Transactions on Green Communications and Networking, vol. 5, no. 1, pp. 106–118, 2020
work page 2020
-
[16]
N. Michel, P. Wei, Z. Kong, and X. Lin, “Energy-optimal unmanned aerial vehicles motion planning and control based on integrated system physical dynamics,”Journal of Dynamic Systems, Measurement, and Control, vol. 145, no. 4, p. 041002, 2023
work page 2023
-
[17]
Vehicle routing problems for drone delivery,
K. Dorling, J. Heinrichs, G. G. Messier, and S. Magierowski, “Vehicle routing problems for drone delivery,”IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 47, no. 1, pp. 70–85, 2016
work page 2016
-
[18]
Trajectory optimization for drone logistics delivery via attention-based pointer network,
F. Kong, J. Li, B. Jiang, H. Wang, and H. Song, “Trajectory optimization for drone logistics delivery via attention-based pointer network,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 4, pp. 4519–4531, 2023
work page 2023
-
[19]
S. A. Pasha and S. Sajadifar, “Enabling the multi-lr ability of drones in the multi-visit truck-drone routing problem with pickup and delivery,”Transportation Research Part E: Logistics and Transportation Review, 2026. [Online]. Available: https://api.semanticscholar.org/CorpusID:285250958
work page 2026
-
[20]
A review of research on shortest path planning algorithms for mobile robots,
L. Wang, X. Yang, S. Liu, H. Liu, J. Peng, and W. Liu, “A review of research on shortest path planning algorithms for mobile robots,”Recent Patents on Engineering, 2024
work page 2024
-
[21]
Comprehensive survey on dynamic graph models,
A. Zaki, M. Attia, D. Hegazy, and S. Amin, “Comprehensive survey on dynamic graph models,”International Journal of Advanced Computer Science and Applications, vol. 7, no. 2, 2016
work page 2016
-
[22]
Tree search algorithm for assigning cooperating uavs to multiple tasks,
S. J. Rasmussen and T. Shima, “Tree search algorithm for assigning cooperating uavs to multiple tasks,”International Journal of Robust and Nonlinear Control: IFAC-Affiliated Journal, vol. 18, no. 2, pp. 135–153, 2008
work page 2008
-
[23]
Efficient tree-svd for subset node embedding over large dynamic graphs,
X. Du, X. Zhang, S. Wang, and Z. Huang, “Efficient tree-svd for subset node embedding over large dynamic graphs,”Proceedings of the ACM on Management of Data, vol. 1, no. 1, pp. 1–26, 2023
work page 2023
-
[24]
Shortest paths on dynamic graphs: a survey,
D. Ferone, P. Festa, A. Napoletano, and T. Pastore, “Shortest paths on dynamic graphs: a survey,”Pesquisa Operacional, vol. 37, no. 3, pp. 487–508, 2017
work page 2017
-
[25]
Learning shortest paths on large dynamic graphs,
J. Yin, W. Rao, and C. Zhang, “Learning shortest paths on large dynamic graphs,” in2021 22nd IEEE International Conference on Mobile Data Management (MDM). IEEE, 2021, pp. 201–208
work page 2021
-
[26]
Energy-optimized path planning for uas in varying winds via reinforcement learning,
P. Banerjee and K. Bradner, “Energy-optimized path planning for uas in varying winds via reinforcement learning,”AIAA AVIATION FORUM AND ASCEND 2024, 2024
work page 2024
-
[27]
B. Zhu, E. Bedeer, H. H. Nguyen, R. Barton, and J. Henry, “Uav trajectory planning in wireless sensor networks for energy consumption minimization by deep reinforcement learning,”IEEE Transactions on Vehicular Technology, vol. 70, no. 9, pp. 9540–9554, 2021
work page 2021
-
[28]
Time-optimal paths for a dubins airplane,
H. Chitsaz and S. M. LaValle, “Time-optimal paths for a dubins airplane,” in2007 46th IEEE Conference on Decision and Control, 2007, pp. 2379–2384
work page 2007
-
[29]
Optimal route planning for truck–drone delivery using variable neighborhood tabu search algorithm,
B. Tong, J. Wang, X. Wang, F. Zhou, X. Mao, and W. Zheng, “Optimal route planning for truck–drone delivery using variable neighborhood tabu search algorithm,”Applied sciences, vol. 12, no. 1, p. 529, 2022
work page 2022
-
[30]
X. Xing, Y . Ma, Y . Lei, Y . Li, and B. Xiao, “Multi-uav rendezvous trajectory planning based on improved maddpg algorithm in complex dynamic obstacle environments,”IEEE Transactions on Vehicular Tech- nology, pp. 1–12, 2025
work page 2025
-
[31]
Partially observable markov decision processes in robotics: A survey,
M. Lauri, D. Hsu, and J. Pajarinen, “Partially observable markov decision processes in robotics: A survey,”IEEE Transactions on Robotics, vol. 39, no. 1, p. 21–40, Feb. 2023. [Online]. Available: http://dx.doi.org/10.1109/TRO.2022.3200138
-
[32]
Sanders,An introduction to Unreal engine 4
A. Sanders,An introduction to Unreal engine 4. AK Peters/CRC Press, 2016
work page 2016
-
[33]
Delivery with uavs: a simulated dataset via ats,
G. Rigoni, C. M. Pinotti, Bhumika, D. Das, and S. K. Das, “Delivery with uavs: a simulated dataset via ats,” in2022 IEEE 95th Vehicular Technology Conference:(VTC2022-Spring). IEEE, 2022, pp. 1–6
work page 2022
-
[34]
Uav delivery planning based on k-means++ clustering and genetic algorithm,
S. Pan, “Uav delivery planning based on k-means++ clustering and genetic algorithm,” in2019 5th International Conference on Control Science and Systems Engineering (ICCSSE). IEEE, 2019, pp. 14–18
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.