RadarSplat-RIO: Indoor Radar-Inertial Odometry with Gaussian Splatting-Based Radar Bundle Adjustment
Pith reviewed 2026-05-10 13:14 UTC · model grok-4.3
The pith
Gaussian Splatting enables the first bundle adjustment for radar, jointly optimizing poses and scene geometry from full measurements.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that Gaussian Splatting can be extended to radar data so that a set of 3D Gaussians serves as a scene model whose parameters and the associated radar poses can be refined together. Rendering the Gaussians produces simulated radar observations that are compared directly against measured range-azimuth-Doppler values; gradients then flow back to adjust both geometry and trajectory over a local window of frames. When this radar bundle adjustment is added to an existing radar-inertial odometry pipeline, average absolute translational error drops by 90 percent and rotational error drops by 80 percent on indoor test sequences.
What carries the argument
Radar-adapted Gaussian Splatting: a dense differentiable scene model of anisotropic 3D Gaussians that is rendered to match full range-azimuth-Doppler radar measurements, supplying gradients for joint pose-and-geometry optimization.
If this is right
- Radar-inertial odometry can now refine past poses inside a sliding window instead of committing to sequential integration only.
- Local multi-frame optimization becomes available for radar without dependence on loop closure or place recognition.
- Full radar returns rather than sparse features can be used directly for map refinement, preserving Doppler and intensity information.
- Indoor localization accuracy improves in conditions where visual or lidar methods are unreliable.
Where Pith is reading between the lines
- The same splatting representation might support fusion of radar with vision or lidar by sharing the underlying Gaussian primitives.
- Error reductions of this magnitude suggest the method could extend to longer trajectories or outdoor settings if multipath handling is added.
- The differentiable radar renderer opens the possibility of end-to-end learning of radar-specific parameters inside the same optimization loop.
Load-bearing premise
Gaussian Splatting can be adapted to full radar measurements to produce stable joint pose and geometry estimates without introducing new biases or requiring heavy per-scene tuning.
What would settle it
A new indoor sequence with ground-truth poses in which the bundle-adjustment stage either increases error relative to the radar-inertial frontend or fails to converge to consistent geometry would show the adaptation does not deliver the claimed benefit.
Figures








read the original abstract
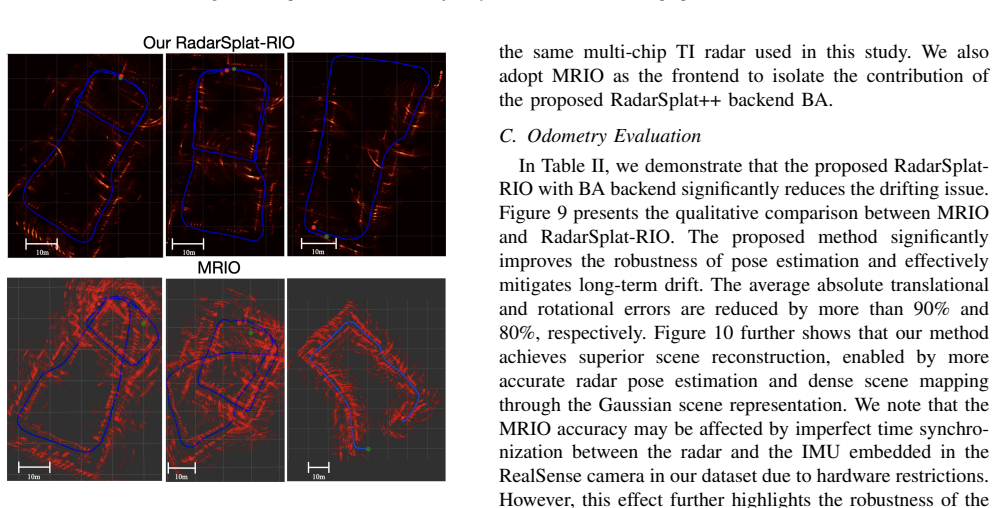
Radar is more resilient to adverse weather and lighting conditions than visual and Lidar simultaneous localization and mapping (SLAM). However, most radar SLAM pipelines still rely heavily on frame-to-frame odometry, which leads to substantial drift. While loop closure can correct long-term errors, it requires revisiting places and relies on robust place recognition. In contrast, visual odometry methods typically leverage bundle adjustment (BA) to jointly optimize poses and map within a local window. However, an equivalent BA formulation for radar has remained largely unexplored. We present the first radar BA framework enabled by Gaussian Splatting (GS), a dense and differentiable scene representation. Our method jointly optimizes radar sensor poses and scene geometry using full range-azimuth-Doppler data, bringing the benefits of multi-frame BA to radar for the first time. When integrated with an existing radar-inertial odometry frontend, our approach significantly reduces pose drift and improves robustness. Across multiple indoor scenes, our radar BA achieves substantial gains over the prior radar-inertial odometry, reducing average absolute translational and rotational errors by 90% and 80%, respectively.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents RadarSplat-RIO, the first radar bundle adjustment framework that adapts Gaussian Splatting to jointly optimize radar sensor poses and scene geometry from full range-azimuth-Doppler measurements. Integrated with an existing radar-inertial odometry frontend, the method is claimed to reduce average absolute translational and rotational errors by 90% and 80%, respectively, across multiple indoor scenes.
Significance. If the rendering model and optimization are shown to be faithful, the work would be significant for radar SLAM by enabling multi-frame bundle adjustment without loop closures, potentially improving drift reduction and dense mapping in adverse conditions where vision and LiDAR are unreliable.
major comments (3)
- [Abstract] Abstract: The abstract reports large quantitative gains (90% translational / 80% rotational error reduction) but supplies no implementation equations, error analysis, ablation studies, or description of how radar measurements are rendered through the Gaussian Splatting model, making it impossible to verify support for the central claim.
- [§3 or §4] §3 or §4: The adaptation of Gaussian Splatting to full range-azimuth-Doppler radar tensors lacks explicit equations or validation against measured responses on controlled geometry; without modeling beam pattern, range weighting, Doppler binning, and multipath, the BA objective risks converging to poses that compensate for rendering error rather than true geometry.
- [Results] Results section: The reported improvements are shown only after integration with the frontend; no standalone evaluation of the radar BA component, ablation isolating its contribution, or comparison to prior radar mapping methods is provided, weakening attribution of the gains to the proposed method.
minor comments (2)
- [Notation] Clarify notation for the radar measurement model, Gaussian parameters, and the differentiable renderer to aid reproducibility.
- [Figures] Add captions and axis labels to all figures showing optimized scenes, trajectories, or error metrics for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and the opportunity to improve our manuscript. We address each major comment below and indicate the planned revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The abstract reports large quantitative gains (90% translational / 80% rotational error reduction) but supplies no implementation equations, error analysis, ablation studies, or description of how radar measurements are rendered through the Gaussian Splatting model, making it impossible to verify support for the central claim.
Authors: The abstract is designed to be concise and highlight the key contributions and quantitative results. Detailed implementation equations for the Gaussian Splatting adaptation to radar tensors, the rendering process, and the bundle adjustment formulation are provided in Sections 3 and 4. Ablation studies and error analyses appear in Section 5. To address the concern, we will update the abstract to briefly describe the radar rendering model and direct readers to the relevant sections for equations and supporting analyses. revision: partial
-
Referee: [§3 or §4] §3 or §4: The adaptation of Gaussian Splatting to full range-azimuth-Doppler radar tensors lacks explicit equations or validation against measured responses on controlled geometry; without modeling beam pattern, range weighting, Doppler binning, and multipath, the BA objective risks converging to poses that compensate for rendering error rather than true geometry.
Authors: We appreciate this feedback on the technical details. Section 3 includes the core equations for projecting Gaussians into radar measurement space and the differentiable rendering. However, we agree that more explicit modeling of the radar beam pattern, range weighting, Doppler binning, and handling of multipath would improve clarity and robustness. We will expand Section 3 with these additional equations and include validation experiments on controlled geometries in the revised manuscript or supplementary material. This will help demonstrate that the optimization converges to accurate geometry rather than compensating for model inaccuracies. revision: yes
-
Referee: [Results] Results section: The reported improvements are shown only after integration with the frontend; no standalone evaluation of the radar BA component, ablation isolating its contribution, or comparison to prior radar mapping methods is provided, weakening attribution of the gains to the proposed method.
Authors: We concur that standalone evaluation of the radar BA is crucial. While the primary results demonstrate the integrated RadarSplat-RIO system, we performed additional experiments isolating the BA component. We will add these to the Results section, including ablations on window size and optimization terms, as well as comparisons against prior radar SLAM and mapping methods. This will strengthen the attribution of performance gains to the proposed Gaussian Splatting-based bundle adjustment. revision: yes
Circularity Check
No significant circularity; method is an independent extension of existing frontend
full rationale
The paper presents a new Gaussian Splatting-based radar bundle adjustment as an add-on to a prior radar-inertial odometry frontend. The core claim of error reduction is supported by experimental comparisons on indoor scenes rather than any self-referential fit, parameter renaming, or self-citation chain. No equations or sections in the provided abstract and description reduce the BA formulation to its own inputs by construction, nor do they invoke uniqueness theorems or ansatzes from the authors' prior work as load-bearing justification. The derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
C. Cui, Y . Ma, J. Lu, and Z. Wang, “Radar enlightens the dark: Enhancing low-visibility perception for automated vehicles with camera-radar fusion,” in2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2023, pp. 2726–2733
work page 2023
-
[2]
Radiate: A radar dataset for automotive percep- tion in bad weather,
M. Sheeny, E. De Pellegrin, S. Mukherjee, A. Ahrabian, S. Wang, and A. Wallace, “Radiate: A radar dataset for automotive percep- tion in bad weather,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 1–7
work page 2021
-
[3]
Radarslam: Radar based large- scale slam in all weathers,
Z. Hong, Y . Petillot, and S. Wang, “Radarslam: Radar based large- scale slam in all weathers,” in2020 IEEE/RSJ International Con- ference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 5164–5170
work page 2020
-
[4]
Through-the-wall radar imaging: A review,
P. Nkwari, S. Sinha, and H. Ferreira, “Through-the-wall radar imaging: A review,”IETE technical review, vol. 35, no. 6, pp. 631– 639, 2018
work page 2018
-
[5]
Instantaneous ego-motion estimation using mul- tiple doppler radars,
D. Kellner, M. Barjenbruch, J. Klappstein, J. Dickmann, and K. Dietmayer, “Instantaneous ego-motion estimation using mul- tiple doppler radars,” in2014 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2014, pp. 1592–1597
work page 2014
-
[6]
A normal distribution transform-based radar odometry designed for scanning and auto- motive radars,
P.-C. Kung, C.-C. Wang, and W.-C. Lin, “A normal distribution transform-based radar odometry designed for scanning and auto- motive radars,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 14 417–14 423
work page 2021
-
[7]
Precise ego-motion estimation with millimeter-wave radar under diverse and challenging conditions,
S. H. Cen and P. Newman, “Precise ego-motion estimation with millimeter-wave radar under diverse and challenging conditions,” in2018 IEEE International Conference on Robotics and Automa- tion (ICRA). IEEE, 2018, pp. 6045–6052
work page 2018
-
[8]
PhaRaO: Direct radar odometry using phase correlation,
Y . S. Park, Y . Shin, and A. Kim, “PhaRaO: Direct radar odometry using phase correlation,” inProceedings of the 2020 IEEE Interna- tional Conference on Robotics and Automation (ICRA), 2020, pp. 2617–2623
work page 2020
-
[9]
Masking by moving: Learn- ing distraction-free radar odometry from pose information,
D. Barnes, R. Weston, and I. Posner, “Masking by moving: Learn- ing distraction-free radar odometry from pose information,” in Proceedings of the Conference on Robot Learning (CoRL), ser. Proceedings of Machine Learning Research, vol. 100. PMLR, 2019, pp. 303–316
work page 2019
-
[10]
Radarize: Enhancing radar SLAM with generalizable doppler-based odometry,
E. Sie, X. Wu, H. Guo, and D. Vasisht, “Radarize: Enhancing radar SLAM with generalizable doppler-based odometry,” inProceed- ings of the 22nd ACM International Conference on Mobile Systems, Applications, and Services (MobiSys ’24). ACM, 2024, pp. 331– 344
work page 2024
-
[11]
Mobile robot positioning: Sensors and techniques,
J. Borenstein, H. R. Everett, L. Feng, and D. Wehe, “Mobile robot positioning: Sensors and techniques,”Journal of robotic systems, vol. 14, no. 4, pp. 231–249, 1997
work page 1997
-
[12]
Spr: Single-scan radar place recognition,
D. C. Herraez, L. Chang, M. Zeller, L. Wiesmann, J. Behley, M. Heidingsfeld, and C. Stachniss, “Spr: Single-scan radar place recognition,”IEEE Robotics and Automation Letters, 2024
work page 2024
-
[13]
Rai-slam: Radar-inertial slam for autonomous vehicles,
D. C. Herraez, M. Zeller, D. Wang, J. Behley, M. Heidingsfeld, and C. Stachniss, “Rai-slam: Radar-inertial slam for autonomous vehicles,”IEEE Robotics and Automation Letters, 2025
work page 2025
-
[14]
Intensity scan context: Coding intensity and geometry relations for loop closure detection,
H. Wang, C. Wang, and L. Xie, “Intensity scan context: Coding intensity and geometry relations for loop closure detection,” in 2020 IEEE international conference on robotics and automation (ICRA). IEEE, 2020, pp. 2095–2101
work page 2020
-
[15]
Riv-slam: Radar-inertial- velocity optimization based graph slam,
D. Wang, S. May, and A. Nuechter, “Riv-slam: Radar-inertial- velocity optimization based graph slam,” in2024 IEEE 20th In- ternational Conference on Automation Science and Engineering (CASE). IEEE, 2024, pp. 774–781
work page 2024
-
[16]
Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras,
R. Mur-Artal and J. D. Tard ´os, “Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras,”IEEE transac- tions on robotics, vol. 33, no. 5, pp. 1255–1262, 2017
work page 2017
-
[17]
Vins-mono: A robust and versatile monocular visual-inertial state estimator,
T. Qin, P. Li, and S. Shen, “Vins-mono: A robust and versatile monocular visual-inertial state estimator,”IEEE transactions on robotics, vol. 34, no. 4, pp. 1004–1020, 2018
work page 2018
-
[18]
Balm: Bundle adjustment for lidar mapping,
Z. Liu and F. Zhang, “Balm: Bundle adjustment for lidar mapping,” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3184– 3191, 2021
work page 2021
-
[19]
Loner: Lidar only neural representations for real-time slam,
S. Isaacson, P.-C. Kung, M. Ramanagopal, R. Vasudevan, and K. A. Skinner, “Loner: Lidar only neural representations for real-time slam,”IEEE Robotics and Automation Letters, vol. 8, no. 12, pp. 8042–8049, 2023
work page 2023
-
[20]
Y . Pan, X. Zhong, L. Wiesmann, T. Posewsky, J. Behley, and C. Stachniss, “Pin-slam: Lidar slam using a point-based implicit neural representation for achieving global map consistency,”IEEE Transactions on Robotics, vol. 40, pp. 4045–4064, 2024
work page 2024
-
[21]
Splat-loam: Gaussian splatting lidar odometry and mapping,
E. Giacomini, L. Di Giammarino, L. De Rebotti, G. Grisetti, and M. R. Oswald, “Splat-loam: Gaussian splatting lidar odometry and mapping,”arXiv preprint arXiv:2503.17491, 2025
-
[22]
P.-C. Kung, S. Harisha, R. Vasudevan, A. Eid, and K. A. Skinner, “Radarsplat: Radar gaussian splatting for high-fidelity data syn- thesis and 3d reconstruction of autonomous driving scenes,”arXiv preprint arXiv:2506.01379, 2025
-
[23]
3d gaus- sian splatting for real-time radiance field rendering
B. Kerbl, G. Kopanas, T. Leimk ¨uhler, and G. Drettakis, “3d gaus- sian splatting for real-time radiance field rendering.”ACM Trans. Graph., vol. 42, no. 4, pp. 139–1, 2023
work page 2023
-
[24]
Nerf: Representing scenes as neural ra- diance fields for view synthesis,
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ra- mamoorthi, and R. Ng, “Nerf: Representing scenes as neural ra- diance fields for view synthesis,”Communications of the ACM, vol. 65, no. 1, pp. 99–106, 2021
work page 2021
-
[25]
Gs- slam: Dense visual slam with 3d gaussian splatting,
C. Yan, D. Qu, D. Xu, B. Zhao, Z. Wang, D. Wang, and X. Li, “Gs- slam: Dense visual slam with 3d gaussian splatting,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 19 595–19 604
work page 2024
-
[26]
Nice-slam: Neural implicit scalable encoding for slam,
Z. Zhu, S. Peng, V . Larsson, W. Xu, H. Bao, Z. Cui, M. R. Oswald, and M. Pollefeys, “Nice-slam: Neural implicit scalable encoding for slam,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2022, pp. 12 786–12 796
work page 2022
-
[27]
Dart: Implicit doppler tomography for radar novel view synthesis,
T. Huang, J. Miller, A. Prabhakara, T. Jin, T. Laroia, Z. Kolter, and A. Rowe, “Dart: Implicit doppler tomography for radar novel view synthesis,” inProceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition, 2024, pp. 24 118–24 129
work page 2024
-
[28]
An EKF based approach to radar inertial odometry,
C. Doer and G. F. Trommer, “An EKF based approach to radar inertial odometry,” inProceedings of the 2020 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI). IEEE, 2020, pp. 152–159
work page 2020
-
[29]
x-rio: Radar inertial odometry with multiple radar sensors and yaw aiding,
——, “x-rio: Radar inertial odometry with multiple radar sensors and yaw aiding,”Gyroscopy and Navigation, vol. 12, no. 4, pp. 329–339, 2021
work page 2021
-
[30]
Multi-radar inertial odometry for 3d state estimation using mmwave imaging radar,
J.-T. Huang, R. Xu, A. Hinduja, and M. Kaess, “Multi-radar inertial odometry for 3d state estimation using mmwave imaging radar,” in 2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 12 006–12 012
work page 2024
-
[31]
ORORA: Outlier- robust radar odometry,
H. Lim, K. Han, G. Shin, G. Kim, and A. Kim, “ORORA: Outlier- robust radar odometry,” inProceedings of the 2023 IEEE Interna- tional Conference on Robotics and Automation (ICRA), 2023, pp. 2046–2053
work page 2023
-
[32]
Less is more: Physical-enhanced radar-inertial odometry,
Q. Huang, Y . Liang, Z. Qiao, S. Shen, and H. Yin, “Less is more: Physical-enhanced radar-inertial odometry,” in2024 IEEE Interna- tional Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 15 966–15 972
work page 2024
-
[33]
RaI-SLAM: Radar-inertial SLAM for autonomous vehicles,
D. C. Herraez, M. Zeller, D. Wang, J. Behley, M. Heidingsfeld, and C. Stachniss, “RaI-SLAM: Radar-inertial SLAM for autonomous vehicles,”IEEE Robotics and Automation Letters, 2025, accepted March 2025 (preprint)
work page 2025
-
[34]
2d ego-motion with yaw estimation using only mmwave radars via two-way weighted ICP,
J. Lee, S. Choi, H. Lim, and A. Kim, “2d ego-motion with yaw estimation using only mmwave radars via two-way weighted ICP,” arXiv preprint, 2024
work page 2024
-
[35]
Radar SLAM based on intensity-augmented normal distributions transform,
M. Hilger, J. Yachin, Z. Trivadi, and K. K ¨oser, “Radar SLAM based on intensity-augmented normal distributions transform,” arXiv preprint, 2024
work page 2024
-
[36]
Equi-ro: A 4d mmwave radar odometry via equivariant networks,
Z. Han, S. Yang, M. Zhu, F. Zhang, S. Xu, M. Ghaffari, and J. Wang, “Equi-ro: A 4d mmwave radar odometry via equivariant networks,”arXiv preprint arXiv:2509.20674, 2025
-
[37]
D. Nist ´er, O. Naroditsky, and J. Bergen, “Visual odometry,” in Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2004. CVPR 2004., vol. 1. Ieee, 2004, pp. I–I
work page 2004
-
[38]
Parallel tracking and mapping for small ar workspaces,
G. Klein and D. Murray, “Parallel tracking and mapping for small ar workspaces,” in2007 6th IEEE and ACM international sympo- sium on mixed and augmented reality. IEEE, 2007, pp. 225–234
work page 2007
-
[39]
Nerf-slam: Real- time dense monocular slam with neural radiance fields,
A. Rosinol, J. J. Leonard, and L. Carlone, “Nerf-slam: Real- time dense monocular slam with neural radiance fields,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Sys- tems (IROS). IEEE, 2023, pp. 3437–3444
work page 2023
-
[40]
Splatam: Splat track & map 3d gaussians for dense rgb-d slam,
N. Keetha, J. Karhade, K. M. Jatavallabhula, G. Yang, S. Scherer, D. Ramanan, and J. Luiten, “Splatam: Splat track & map 3d gaussians for dense rgb-d slam,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 21 357–21 366
work page 2024
-
[41]
H. Matsuki, R. Murai, P. H. Kelly, and A. J. Davison, “Gaus- sian splatting slam,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 18 039– 18 048
work page 2024
-
[42]
Loam: Lidar odometry and mapping in real-time
J. Zhang, S. Singh,et al., “Loam: Lidar odometry and mapping in real-time.” inRobotics: Science and systems, vol. 2, no. 9. Berkeley, CA, 2014, pp. 1–9
work page 2014
-
[43]
A cfar adap- tive matched filter detector,
D. R. Fuhrmann, E. J. Kelly, and R. Nitzberg, “A cfar adap- tive matched filter detector,”IEEE Trans. Aerosp. Electron. Syst, vol. 28, no. 1, pp. 208–216, 1992
work page 1992
-
[44]
Factor graphs and gtsam: A hands-on introduction,
F. Dellaert, “Factor graphs and gtsam: A hands-on introduction,” Georgia Institute of Technology, Tech. Rep, vol. 2, no. 4, 2012
work page 2012
-
[45]
The oxford radar robotcar dataset: A radar extension to the ox- ford robotcar dataset,
D. Barnes, M. Gadd, P. Murcutt, P. Newman, and I. Posner, “The oxford radar robotcar dataset: A radar extension to the ox- ford robotcar dataset,” in2020 IEEE international conference on robotics and automation (ICRA). IEEE, 2020, pp. 6433–6438
work page 2020
-
[46]
nuscenes: A multimodal dataset for autonomous driving,
H. Caesar, V . Bankiti, A. H. Lang, S. V ora, V . E. Liong, Q. Xu, A. Krishnan, Y . Pan, G. Baldan, and O. Beijbom, “nuscenes: A multimodal dataset for autonomous driving,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2020, pp. 11 621–11 631
work page 2020
-
[47]
Multi-class road user detection with 3+ 1d radar in the view-of- delft dataset,
A. Palffy, E. Pool, S. Baratam, J. F. Kooij, and D. M. Gavrila, “Multi-class road user detection with 3+ 1d radar in the view-of- delft dataset,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4961–4968, 2022
work page 2022
-
[48]
Coloradar: The direct 3d millimeter wave radar dataset,
A. Kramer, K. Harlow, C. Williams, and C. Heckman, “Coloradar: The direct 3d millimeter wave radar dataset,”The International Journal of Robotics Research, vol. 41, no. 4, pp. 351–360, 2022
work page 2022
-
[49]
M. Labb ´e and F. Michaud, “Rtab-map as an open-source lidar and visual simultaneous localization and mapping library for large- scale and long-term online operation,”Journal of field robotics, vol. 36, no. 2, pp. 416–446, 2019
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.