One-Shot Generative Flows: Existence and Obstructions
Pith reviewed 2026-05-11 00:49 UTC · model grok-4.3
The pith
Straight-line generative flows exist for arbitrary Gaussian endpoints but cannot exist for targets with sufficiently well-separated modes under independent endpoints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Under endpoint independence, a stochastic process induces a straight-line flow precisely when its pointwise acceleration vanishes; such flows exist and are given by closed-form expressions when both the source and the target are Gaussian, yet no straight-line process exists once the target measure contains modes separated by a sufficient distance, because independence forces the paths to exhibit nonzero acceleration in order to respect the space-time geometry of the flow map.
What carries the argument
The straight-line flow induced by a process with independent endpoints (X0, X1) ~ P0 ⊗ P1 whose velocity field is the conditional expectation of the time derivative and whose acceleration field is identically zero.
If this is right
- Any first-order integrator can integrate the flow exactly when the endpoints are Gaussian.
- Generative models that rely on straight-line flows are restricted to unimodal or Gaussian-like targets under the independence assumption.
- The space-time geometry of the flow map is completely determined by the independent-endpoint condition.
- PDE characterizations of the conditional velocity and acceleration fields provide a way to test the straight-line property without path simulation.
Where Pith is reading between the lines
- Allowing dependence between endpoints could remove the obstruction and permit straight-line flows for multimodal targets.
- The result suggests that many practical generative flows must either use curved paths or introduce additional degrees of freedom beyond endpoint independence.
- Numerical experiments could check whether learned velocity fields on bimodal data inevitably develop acceleration when forced to satisfy endpoint independence.
Load-bearing premise
The starting and ending points of every sample path are drawn independently from the source and target measures.
What would settle it
An explicit construction of a straight-line process connecting a source Gaussian to a target consisting of two well-separated modes, or a direct calculation showing nonzero acceleration in one of the Gaussian constructions given in the paper.
Figures




read the original abstract
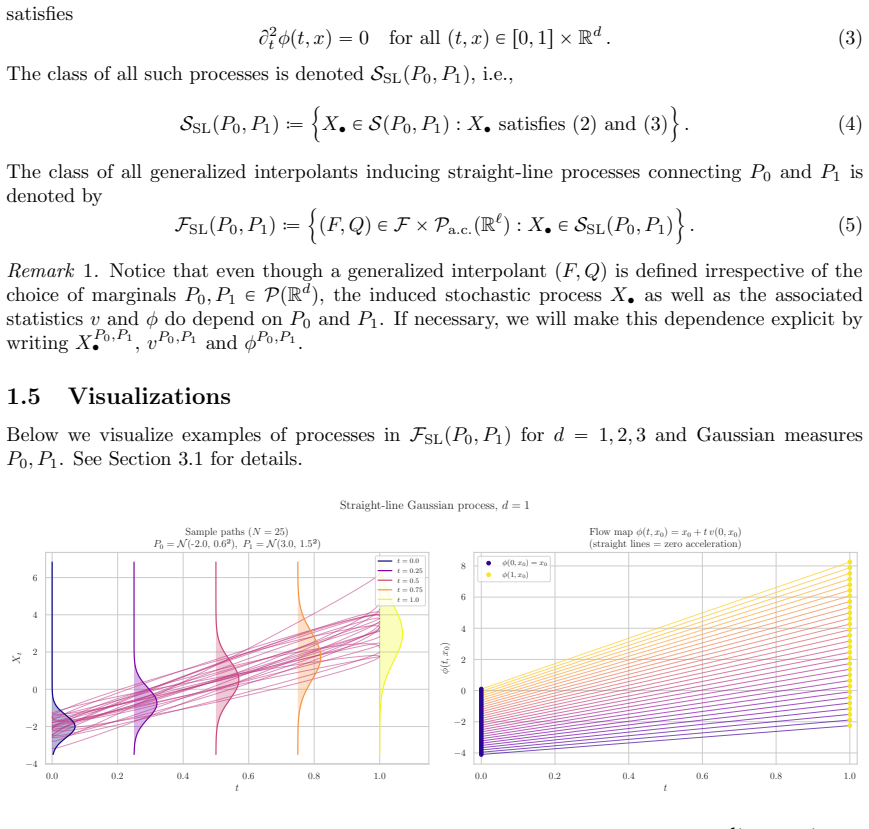
We study dynamic measure transport for generative modeling, focusing on transport maps that connect a source measure $P_0$ to a target measure $P_1$ by integrating a velocity field of the form $v_t(x) = \mathbb{E}[\dot X_t \mid X_t = x]$, where $X_\bullet = (X_t)_t$ is a stochastic process satisfying $(X_0,X_1)\sim{P_0}\otimes{P_1}$ and $\dot X_t$ is its time derivative. We investigate when $X_\bullet$ induces a \emph{straight-line flow}: a flow whose pointwise acceleration vanishes and is therefore exactly integrable by any first-order method. First, we develop multiple characterizations of straight-line flows in terms of PDEs involving the conditional statistics of the process. Then, we prove that straight-line flows under endpoint independence exhibit a sharp dichotomy. On the one hand, we construct explicit, computable straight-line processes for arbitrary Gaussian endpoints. On the other hand, we show that straight-line processes do not exist for targets with sufficiently well-separated modes. We demonstrate this obstruction through a sequence of increasingly general impossibility theorems that uncover a fundamental relationship between the sample-path behavior of a process with independent endpoints and the space-time geometry of this process' flow map. Taken together, these results provide a structural theory of when straight-line generative flows can, and cannot, exist.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a theory of straight-line flows for dynamic measure transport in generative modeling. Under endpoint independence (X_0, X_1) ~ P_0 ⊗ P_1, it derives multiple characterizations of flows with vanishing pointwise acceleration via PDEs on the conditional statistics of the velocity field v_t(x) = E[Ẋ_t | X_t = x]. It then proves a sharp dichotomy: explicit, computable straight-line processes exist for arbitrary Gaussian endpoints, while no such processes exist for targets with sufficiently well-separated modes, established through a sequence of impossibility theorems linking sample-path linearity to the space-time geometry of the induced flow map.
Significance. If the derivations hold, this provides a structural theory clarifying fundamental existence and obstruction conditions for straight-line generative flows. The explicit Gaussian constructions and the impossibility results for multimodal targets offer concrete guidance on when first-order integrators are exact, which could inform the design and limitations of flow-based models. The characterizations via conditional expectations and PDEs, together with the use of standard stochastic-process arguments, constitute a clean theoretical contribution without reliance on fitted parameters or ad-hoc entities.
minor comments (3)
- [Introduction] The introduction would benefit from a short paragraph contrasting the endpoint-independence assumption with the joint distributions used in standard continuous normalizing flows or diffusion models.
- [Gaussian constructions] In the section presenting the Gaussian constructions, an explicit formula for the velocity field (or at least its closed form) should be stated alongside the existence proof to make the 'computable' claim immediately verifiable.
- [Impossibility results] The impossibility theorems would be strengthened by a brief remark on the minimal separation distance required for the mode-separation argument to apply, even if only asymptotically.
Simulated Author's Rebuttal
We thank the referee for their positive summary of the manuscript, recognition of its theoretical contribution, and recommendation for minor revision. No specific major comments were provided in the report.
Circularity Check
No significant circularity; derivations are self-contained
full rationale
The paper defines the velocity field directly as the conditional expectation v_t(x) = E[Ẋ_t | X_t = x] under the endpoint-independence assumption (X_0, X_1) ~ P_0 ⊗ P_1. It then derives PDE characterizations of straight-line flows (zero acceleration) from this definition and proves existence for Gaussians via explicit constructions plus non-existence for separated modes via impossibility theorems on sample-path linearity. These steps rely on standard stochastic-process arguments and conditional statistics rather than any fitted parameters renamed as predictions, self-citation chains, or ansatzes smuggled in from prior work. The central dichotomy follows from the geometry of the flow map under the stated assumptions without reduction to inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Conditional expectations E[· | X_t = x] exist and define a measurable velocity field
- domain assumption The process X_• has independent endpoints distributed as P_0 ⊗ P_1
Reference graph
Works this paper leans on
-
[1]
For allpt, xq P r0,1s ˆR d, one has d2 dt2 ϕtpxq “0
-
[2]
For allpt, xq P r0,1s ˆR d, one has ϕtpxq “ p1´tqx`t ϕ 1pxq
-
[3]
For allpt, xq P r0,1s ˆR d, one has Dtvtpxq “0. Proof.It is clear thatp2q ù ñ p1qLet us show thatp1q ù ñ p2q. We have d2 dt2 ϕtpxq “0ù ñ DcPR d :B tϕtpxq “c , so using the boundary conditionϕ tpxq “xwe get ϕtpxq “x`t c . This further implies c“ϕ 1pxq ´x , and doing some algebra we get ϕtpxq “ p1´tqx`t ϕ 1pxq. Finally, let us show thatp1q ð ñ p3q. By defin...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.