Scalable Outer Approximation of Minkowski Sums of Matrix Ellipsoids for Data-Driven Control
Pith reviewed 2026-05-10 10:00 UTC · model grok-4.3
The pith
A parameterized family of matrix ellipsoids yields scalable outer approximations to their Minkowski sums without linear matrix inequalities.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that restricting the outer approximant to a suitably parameterized family of matrix ellipsoids yields both an exact analytical optimum for the sum-of-squared-semi-axes criterion and a convergent majorization-minimization algorithm for the minimum-volume criterion, entirely avoiding the linear-matrix-inequality formulations whose cost grows quadratically with the number of summands.
What carries the argument
A parameterized family of bounding matrix ellipsoids, optimized either analytically or via majorization-minimization updates derived from a first-order approximation of the log-determinant.
If this is right
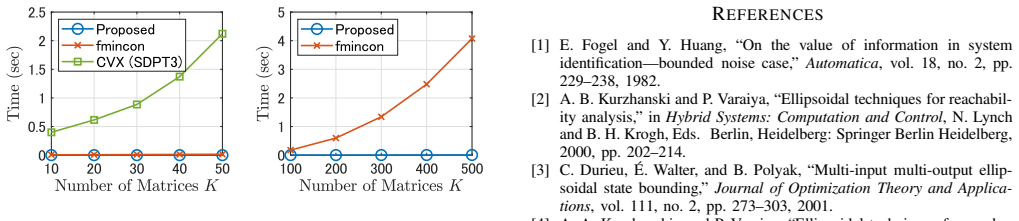
- The outer approximation can be obtained with computational cost linear in the number of ellipsoids being summed.
- The majorization-minimization iteration converges monotonically to a stationary point of the volume objective.
- Robust control synthesis becomes feasible for substantially longer observation sequences than LMI methods allow.
- Exact closed-form solutions are available when the sum-of-squares criterion is used instead of volume.
Where Pith is reading between the lines
- Similar parameterization techniques could be investigated for other convex set approximations in robust optimization.
- The quality of the stationary points relative to the global optimum may be characterized further by convexity analysis of the objectives.
- Integration with existing data-driven control frameworks could reduce overall conservatism in uncertainty modeling.
Load-bearing premise
The selected parameterized family remains expressive enough to produce outer approximations whose tightness is adequate for the control problems of interest.
What would settle it
Compare the volume or sum of squared semi-axes of the computed outer ellipsoid against the true Minkowski sum on randomly generated families of matrix ellipsoids whose exact sums are known analytically; systematic growth of the approximation ratio as the number of summands increases would falsify the claim of useful scalability and tightness.
Figures
read the original abstract
Matrix ellipsoids provide a standard framework for representing bounded uncertainties in data-driven control. Since noise models for sequential observations are naturally represented as the Minkowski sum of multiple matrix ellipsoids, applying existing robust control methods, which typically assume a single ellipsoidal set, requires a tight outer approximation. While techniques based on linear matrix inequalities (LMI) are applicable, their computational cost grows quadratically with the data length, limiting their scalability. This paper investigates the optimal outer approximation problem under two criteria: the sum of squared semi-axes and the volume. We propose an LMI-free approach by introducing a parameterized family of bounding matrix ellipsoids. Specifically, we derive an exact analytical solution for the first criterion and develop an efficient majorization-minimization (MM) algorithm for the second. The proposed MM algorithm employs a first-order approximation of the log-determinant function to provide closed-form update rules, ensuring monotonic convergence to the set of stationary points. Numerical experiments demonstrate that our method offers significantly higher computational efficiency and scalability than standard interior-point solvers.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an LMI-free method for computing tight outer approximations of Minkowski sums of matrix ellipsoids using a parameterized family of bounding ellipsoids. For the sum-of-squared-semi-axes criterion, an exact analytical solution is derived, while for the volume criterion, a majorization-minimization (MM) algorithm with first-order log-determinant approximation provides closed-form updates and monotonic convergence to stationary points. Numerical experiments show improved computational efficiency and scalability compared to standard interior-point solvers for LMI-based methods.
Significance. If the parameterized family provides sufficiently tight outer approximations and the MM stationary points are close to global optima, this approach could enable scalable robust control for long data sequences in data-driven settings by avoiding the quadratic scaling of LMI solvers. The exact solution for one criterion and the guaranteed monotonic convergence of the MM algorithm are particular strengths, along with the provision of closed-form update rules.
major comments (3)
- The assertion of an 'exact analytical solution' for the sum of squared semi-axes and the 'monotonic convergence' of the MM algorithm for volume are central claims, but the full derivations, tightness proofs, and experimental data tables are not visible in the provided text, preventing confirmation that there are no derivation gaps.
- The chosen parameterized family of bounding matrix ellipsoids is claimed to yield useful outer approximations, but no argument is provided that this family is sufficiently expressive (e.g., dense in the space of matrix ellipsoids) or that its optima are close to the true minimal outer ellipsoids for typical Minkowski sums in data-driven control.
- While efficiency is demonstrated, specific metrics on approximation quality (such as the ratio of volumes or sum-of-squares to the optimal LMI solution) are needed to substantiate that the approximations are tight enough for practical control applications.
minor comments (2)
- Clarify the definition of matrix ellipsoids and the parameterization early in the introduction for readers unfamiliar with the framework.
- The abstract mentions 'significantly higher computational efficiency' but could include a brief mention of the specific speedup factors observed in experiments.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below and indicate planned revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: The assertion of an 'exact analytical solution' for the sum of squared semi-axes and the 'monotonic convergence' of the MM algorithm for volume are central claims, but the full derivations, tightness proofs, and experimental data tables are not visible in the provided text, preventing confirmation that there are no derivation gaps.
Authors: The exact analytical solution for the sum-of-squared-semi-axes criterion is derived in Section 3.1 by parameterizing the bounding ellipsoid and solving the resulting scalar optimization problem in closed form. The monotonic convergence of the MM algorithm to stationary points is established in Theorem 4.1 via the standard majorization property that the surrogate is tight at the current iterate and the objective decreases at each step. We will expand the revised manuscript with additional intermediate steps, explicit tightness arguments, and expanded experimental tables in Section 5 to eliminate any potential gaps. revision: partial
-
Referee: The chosen parameterized family of bounding matrix ellipsoids is claimed to yield useful outer approximations, but no argument is provided that this family is sufficiently expressive (e.g., dense in the space of matrix ellipsoids) or that its optima are close to the true minimal outer ellipsoids for typical Minkowski sums in data-driven control.
Authors: The parameterized family is selected in Section 2 to enable LMI-free closed-form or iterative solutions while preserving the matrix-ellipsoid structure relevant to sequential noise models. We acknowledge that no explicit density argument or general closeness guarantee to the global minimal outer ellipsoid was provided. In the revision we will add a dedicated paragraph discussing the family's expressiveness, including recovery of exact sums in aligned cases, and its suitability for data-driven control applications based on the structure of Minkowski sums arising from noise models. A formal density proof is not claimed and will not be added. revision: partial
-
Referee: While efficiency is demonstrated, specific metrics on approximation quality (such as the ratio of volumes or sum-of-squares to the optimal LMI solution) are needed to substantiate that the approximations are tight enough for practical control applications.
Authors: We agree that direct quality metrics relative to LMI optima are valuable. The current experiments focus on scalability for long sequences where LMI solvers become prohibitive. We will add a new subsection in Section 5 with comparisons on small-scale instances (where LMI solutions remain tractable), reporting the ratios of sum-of-squared-semi-axes and volumes achieved by our method versus the LMI-based optima to quantify tightness for practical use. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper introduces an explicit parameterized family of bounding matrix ellipsoids as a new modeling choice, then derives an exact closed-form solution for the sum-of-squared-semi-axes criterion and a standard majorization-minimization scheme (first-order log-det majorizer yielding closed-form updates) for the volume criterion. These steps are algorithmic derivations from the chosen parameterization and do not reduce to self-definitions, fitted inputs renamed as predictions, or load-bearing self-citations. The abstract and described approach contain no uniqueness theorems imported from prior author work, no ansatz smuggled via citation, and no renaming of known results. The method is self-contained against external benchmarks such as interior-point LMI solvers, with performance claims resting on the independent parameterization and MM convergence properties rather than tautological reductions.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Matrix ellipsoids are represented by positive definite matrices that bound uncertainty sets in the standard way used in robust control.
Reference graph
Works this paper leans on
-
[1]
On the value of information in syst em identification—bounded noise case,
E. Fogel and Y . Huang, “On the value of information in syst em identification—bounded noise case,” Automatica, vol. 18, no. 2, pp. 229–238, 1982
work page 1982
-
[2]
Ellipsoidal technique s for reachabil- ity analysis,
A. B. Kurzhanski and P . V araiya, “Ellipsoidal technique s for reachabil- ity analysis,” in Hybrid Systems: Computation and Control , N. Lynch and B. H. Krogh, Eds. Berlin, Heidelberg: Springer Berlin He idelberg, 2000, pp. 202–214
work page 2000
-
[3]
Multi-input multi-output ellip- soidal state bounding,
C. Durieu, ´E. Walter, and B. Polyak, “Multi-input multi-output ellip- soidal state bounding,” Journal of Optimization Theory and Applica- tions, vol. 111, no. 2, pp. 273–303, 2001
work page 2001
-
[4]
Ellipsoidal techniqu es for reacha- bility analysis of discrete-time linear systems,
A. A. Kurzhanskiy and P . V araiya, “Ellipsoidal techniqu es for reacha- bility analysis of discrete-time linear systems,” IEEE Trans. Automat. Contr ., vol. 52, no. 1, pp. 26–38, 2007
work page 2007
-
[5]
Closed-form characterizat ion of the Minkowski sum and difference of two ellipsoids,
Y . Y an and G. S. Chirikjian, “Closed-form characterizat ion of the Minkowski sum and difference of two ellipsoids,” Geometriae Dedi- cata, vol. 177, no. 1, pp. 103–128, 2015
work page 2015
-
[6]
On the parameterized computation of minimum volume outer ellipsoid of Minkowski sum of ellipsoids,
A. Halder, “On the parameterized computation of minimum volume outer ellipsoid of Minkowski sum of ellipsoids,” in 2018 IEEE Conference on Decision and Control (CDC) , 2018, pp. 4040–4045
work page 2018
-
[7]
From noi sy data to feedback controllers: Nonconservative design via a matrix S- lemma,
H. J. van Waarde, M. K. Camlibel, and M. Mesbahi, “From noi sy data to feedback controllers: Nonconservative design via a matrix S- lemma,” IEEE Trans. Automat. Contr . , vol. 67, no. 1, pp. 162–175, 2022
work page 2022
-
[8]
Quadratic matrix inequalities with applications to data- based control,
H. J. van Waarde, M. K. Camlibel, J. Eising, and H. L. Trent elman, “Quadratic matrix inequalities with applications to data- based control,” SIAM Journal on Control and Optimization , vol. 61, no. 4, pp. 2251– 2281, 2023
work page 2023
-
[9]
Data-driven contro l via Pe- tersen’s lemma,
A. Bisoffi, C. De Persis, and P . Tesi, “Data-driven contro l via Pe- tersen’s lemma,” Automatica, vol. 145, no. 110537, 2022
work page 2022
-
[10]
On d ata-driven control: Informativity of noisy input-output data with cro ss-covariance bounds,
T. R. V . Steentjes, M. Lazar, and P . M. J. V an den Hof, “On d ata-driven control: Informativity of noisy input-output data with cro ss-covariance bounds,” IEEE Control Systems Letters , vol. 6, pp. 2192–2197, 2022
work page 2022
-
[11]
A behavioral approach to data-driven control with noisy in put-output data,
H. J. van Waarde, J. Eising, M. K. Camlibel, and H. L. Tren telman, “A behavioral approach to data-driven control with noisy in put-output data,” IEEE Trans. Automat. Contr ., vol. 69, no. 2, pp. 813–827, 2024
work page 2024
-
[12]
Cont roller synthesis for input-state data with measurement errors,
A. Bisoffi, L. Li, C. D. Persis, and N. Monshizadeh, “Cont roller synthesis for input-state data with measurement errors,” IEEE Control Systems Letters , vol. 8, pp. 1571–1576, 2024
work page 2024
-
[13]
Cont roller synthesis from noisy-input noisy-output data,
L. Li, A. Bisoffi, C. De Persis, and N. Monshizadeh, “Cont roller synthesis from noisy-input noisy-output data,” Automatica, vol. 183, p. 112545, 2026
work page 2026
-
[14]
Data informativity for qu adratic stabilization under data perturbation,
T. Kaminaga and H. Sasahara, “Data informativity for qu adratic stabilization under data perturbation,” in 2025 American Control Conference (ACC), 2025
work page 2025
-
[15]
Data Informativity under Data Perturbation
——, “Data informativity under data perturbation,” 202 5. [Online]. Available: https://arxiv.org/abs/2505.01641
work page internal anchor Pith review Pith/arXiv arXiv
-
[16]
Trade-offs in lear ning controllers from noisy data,
A. Bisoffi, C. De Persis, and P . Tesi, “Trade-offs in lear ning controllers from noisy data,” Systems & Control Letters , vol. 154, no. 104985, 2021
work page 2021
-
[17]
Robust data-driven predictive contro l for unknown linear systems with bounded disturbances,
K. Hu and T. Liu, “Robust data-driven predictive contro l for unknown linear systems with bounded disturbances,” IEEE Trans. Automat. Contr ., pp. 1–16, 2025
work page 2025
-
[18]
Majorization-minim ization algo- rithms in signal processing, communications, and machine l earning,
Y . Sun, P . Babu, and D. P . Palomar, “Majorization-minim ization algo- rithms in signal processing, communications, and machine l earning,” IEEE Trans. Signal Processing , vol. 65, no. 3, pp. 794–816, 2017
work page 2017
-
[19]
S. Boyd, L. El Ghaoui, E. Feron, and V . Balakrishnan, Linear Matrix Inequalities in System and Control Theory . SIAM, 1994
work page 1994
-
[20]
S. P . Boyd and L. V andenberghe, Convex Optimization. Cambridge University Press, 2004
work page 2004
-
[21]
D. G. Luenberger and Y . Y e, Linear and Nonlinear Programming , 5th ed., ser. International Series in Operations Research & Manage- ment Science. Springer, 2021, vol. 228
work page 2021
-
[22]
Sdpt3 — a matlab software package for semidefinite programming, version 1.3,
K. C. Toh, M. J. Todd, and R. H. T ¨ ut¨ unc¨ u, “Sdpt3 — a matlab software package for semidefinite programming, version 1.3,” Optimization Methods and Software , vol. 11, no. 1-4, pp. 545–581, 1999
work page 1999
-
[23]
CVX: Matlab software for disciplined convex programming, version 2.0,
I. CVX Research, “CVX: Matlab software for disciplined convex programming, version 2.0,” https://cvxr.com/cvx, 2012
work page 2012
-
[24]
Graph implementations for nonsmo oth convex programs,
M. Grant and S. Boyd, “Graph implementations for nonsmo oth convex programs,” in Recent Advances in Learning and Control , ser. Lecture Notes in Control and Information Sciences, V . Blondel, S. Bo yd, and H. Kimura, Eds. Springer-V erlag Limited, 2008, pp. 95–110
work page 2008
-
[25]
A. Ben-Tal and A. Nemirovski, Lectures on Modern Convex Optimiza- tion: Analysis, Algorithms, and Engineering Applications . SIAM, 2001
work page 2001
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.