Recognition: no theorem link
Bridging the Experimental Last Mile: Digitizing Laboratory Know-How for Safe AI-Assisted Support
Pith reviewed 2026-05-15 10:41 UTC · model grok-4.3
The pith
A system using first-person lab videos and retrieval-augmented generation extracts site-specific know-how to support safe AI-assisted experiments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
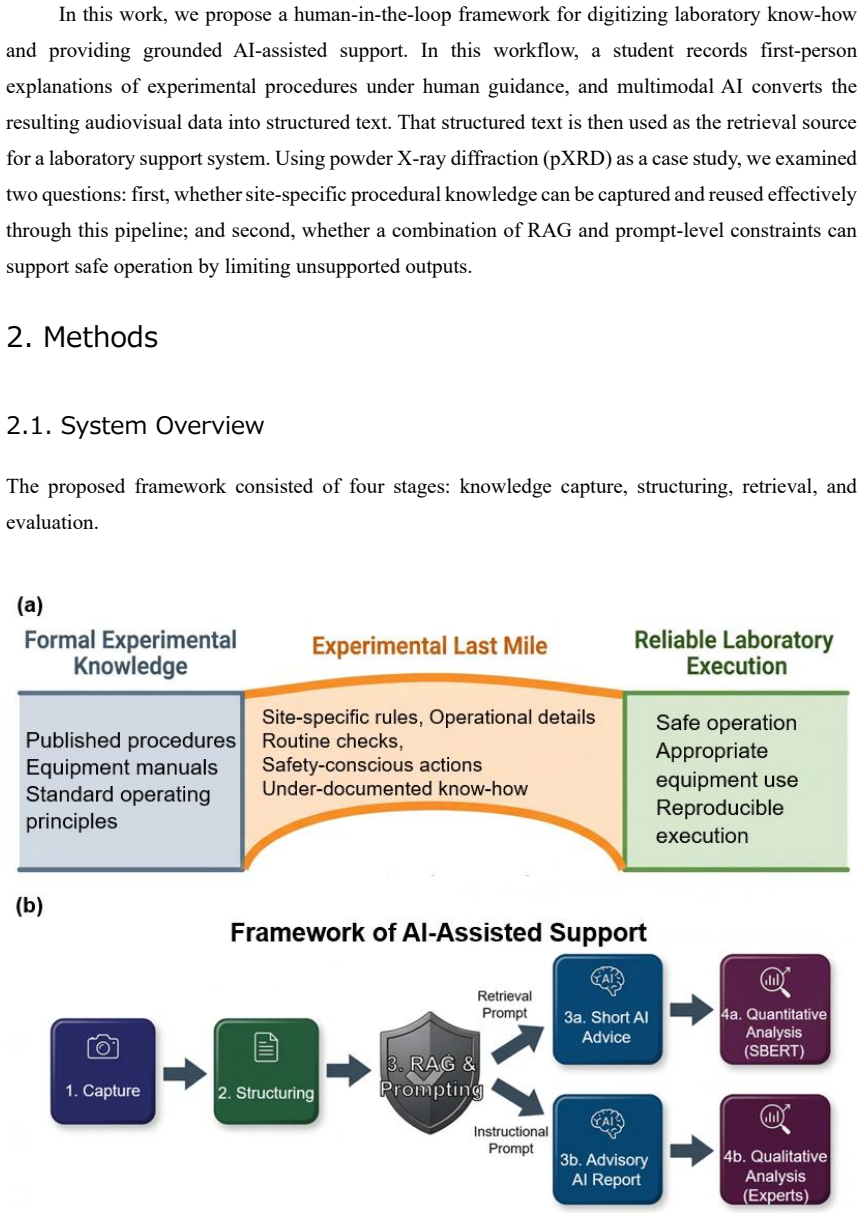
The paper claims that a human-in-the-loop AI assistant combining first-person experimental video, multimodal AI, and retrieval-augmented generation can extract site-specific laboratory knowledge—including physical techniques and audible confirmations omitted from standard manuals—and deliver grounded responses under a two-layer safety design of source restriction and strict prompt constraints, as shown by alignment with instructor guidance on in-scope questions, appropriate refusals on out-of-scope queries, and expert ratings of utility at 3.25/4.00 and safety at 4.00/4.00.
What carries the argument
The two-layer safety design that restricts outputs to retrieved source material through retrieval-augmented generation while enforcing strict system-prompt constraints against unsupported claims.
If this is right
- Routine video recordings of lab procedures can be turned into a searchable digital manual without additional formal documentation.
- The assistant correctly refuses queries outside the extracted knowledge, lowering the chance of unsupported or hallucinated advice.
- Expert reviewers find the generated advisory reports both useful and safe when the safety layers are applied.
- AI support becomes practical for educational and exploratory labs that rely on human-led experiments rather than full automation.
Where Pith is reading between the lines
- The same video-to-manual extraction process could transfer to other experimental fields that share similar gaps between written protocols and on-site practice.
- Combining this approach with self-driving laboratory systems might let AI handle routine verification steps while humans retain oversight of safety-critical decisions.
- Scaling the video corpus would require explicit checks for coverage of all local rules to maintain the refusal behavior on novel queries.
- Over time the digitized know-how could shorten onboarding for new lab members by supplying on-demand, grounded reminders during experiments.
Load-bearing premise
The knowledge extracted from a limited set of student-recorded videos is sufficiently complete and representative of all site-specific operational know-how needed for safe execution in real laboratory conditions.
What would settle it
A test in which the system is queried on an unrecorded site-specific procedure and either supplies incorrect advice or fails to refuse, resulting in an unsafe action.
Figures

read the original abstract
While advances in materials informatics have accelerated the development of Self-Driving Laboratories (SDLs), human-led experiments remain standard in many educational and exploratory research laboratories. In specific lab settings, formal documentation alone is often insufficient for safe and reliable operation. We refer to the gap between formal documentation and reliable execution in such settings as the experimental last mile; this gap mainly involves site-specific operational know-how, including local rules, routine checks, procedural details, and safety-conscious actions that are can be verbalizable but are often under-documented in standard manuals. In this proof-of-concept study, we developed a human-in-the-loop AI assistant that combines first-person experimental video, multimodal AI, and retrieval-augmented generation (RAG). Using powder X-ray diffraction experiments and student-recorded video data as inputs, the system extracts site-specific laboratory knowledge from recorded procedures, including physical techniques and audible confirmation that conventional manuals could omit. It then provides grounded responses based on the resulting manual. To reduce the risk of unsupported outputs, the system employs a two-layer safety design: source restriction through RAG and strict system-prompt constraints. Instructor-based evaluation showed alignment with expected guidance for questions covered by the manual. For out-of-scope queries, the system appropriately refused to answer, indicating a reduced risk of hallucination. Expert evaluation further indicated that the generated advisory reports were useful and safe (utility: 3.25/4.00; safety: 4.00/4.00). These results suggest the feasibility of a framework for bridging the experimental last mile in which AI supports laboratory practice under explicit human supervision rather than replacing human judgment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a proof-of-concept human-in-the-loop AI assistant that extracts site-specific laboratory know-how (local rules, procedural details, safety actions) from student-recorded first-person videos of powder X-ray diffraction (PXRD) experiments via multimodal AI and retrieval-augmented generation (RAG). It employs a two-layer safety design (RAG source restriction plus strict prompt constraints) to ground responses and refuse out-of-scope queries, with instructor evaluations showing alignment on in-scope questions and appropriate refusals, plus expert ratings of utility 3.25/4 and safety 4/4.
Significance. If the central claims hold, the work provides a practical framework for safely digitizing tacit operational knowledge in educational and exploratory labs, supporting AI assistance under explicit human supervision rather than replacement. The video-based extraction of audible confirmations and physical techniques, combined with the refusal mechanism, represents a concrete step toward bridging the 'experimental last mile' in materials informatics settings.
major comments (2)
- [Evaluation methodology] The instructor evaluation (described in the abstract and results) only verifies alignment with the derived RAG manual and refusal behavior on out-of-scope queries; it does not include an independent completeness audit of whether the limited student video corpus captures all critical procedural details, local rules, and safety actions present in expert practice or varied real-lab conditions. This untested assumption is load-bearing for the safety and utility claims.
- [Results] No quantitative error rates, baseline comparison to manual-only guidance, or public data/code release are reported, leaving the small-scale PoC without measurable performance benchmarks or reproducibility support for the central feasibility claim.
minor comments (1)
- [Abstract] Abstract contains a minor grammatical issue: 'that are can be verbalizable' should read 'that can be verbalizable'.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback and for recognizing the potential of our proof-of-concept in bridging the experimental last mile. We address each major comment below and outline the revisions we will make to the manuscript.
read point-by-point responses
-
Referee: [Evaluation methodology] The instructor evaluation (described in the abstract and results) only verifies alignment with the derived RAG manual and refusal behavior on out-of-scope queries; it does not include an independent completeness audit of whether the limited student video corpus captures all critical procedural details, local rules, and safety actions present in expert practice or varied real-lab conditions. This untested assumption is load-bearing for the safety and utility claims.
Authors: We acknowledge the referee's concern regarding the scope of our evaluation. Our instructor-based assessment focused on verifying that the system correctly aligns with the knowledge extracted from the provided video corpus and appropriately refuses out-of-scope queries, which directly tests the two-layer safety design. As this is explicitly a proof-of-concept study, a comprehensive completeness audit against expert practice across varied conditions was not feasible within the current scope. We will revise the manuscript to include an explicit discussion of this limitation and propose it as an important direction for future work to strengthen the safety claims. revision: partial
-
Referee: [Results] No quantitative error rates, baseline comparison to manual-only guidance, or public data/code release are reported, leaving the small-scale PoC without measurable performance benchmarks or reproducibility support for the central feasibility claim.
Authors: We agree that quantitative benchmarks would enhance the paper. However, the study emphasizes qualitative expert evaluation of utility and safety for this novel application, and deriving meaningful error rates would require a larger dataset and controlled experiments not included in this initial PoC. We did not include a baseline comparison because the system is intended to augment rather than replace manual guidance. To address reproducibility, we commit to releasing the code and anonymized data upon acceptance. We will update the manuscript to clarify these points and the rationale for the current evaluation approach. revision: partial
Circularity Check
No significant circularity; empirical evaluation is self-contained
full rationale
The paper is a proof-of-concept description of an AI assistant built from student videos via multimodal extraction and RAG, followed by direct human evaluations of alignment, refusal behavior, utility, and safety. No equations, fitted parameters, or predictions appear. The term 'experimental last mile' is introduced by definition in the abstract and introduction but is not used as a load-bearing premise that reduces to itself; the central results rest on independent instructor and expert ratings rather than any self-referential derivation or self-citation chain. The work therefore contains no steps that reduce by construction to their inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Formal documentation alone is often insufficient for safe and reliable laboratory operation in educational and exploratory settings.
invented entities (1)
-
experimental last mile
no independent evidence
Reference graph
Works this paper leans on
-
[1]
N. J. Szymanski, B. Rendy, Y . Fei, R. E. Kumar, T. He, D. Milsted, M. J. McDermott, M. Gallant, E. D. Cubuk, A. Merchant, H. Kim, A. Jain, C. J. Bartel, K. Persson, Y . Zeng and G. Ceder, Nature, 2023, 624, 86-91
work page 2023
-
[2]
G. Tom, S. P. Schmid, S. G. Baird, Y . Cao, K. Darvish, H. Hao, S. Lo, S. Pablo -Garcia, E. M. Rajaonson, M. Skreta, N. Yoshikawa, S. Corapi, G. D. Akkoc, F. Strieth-Kalthoff, M. Seifrid and A. Aspuru-Guzik, Chem Rev, 2024, 124, 9633-9732
work page 2024
-
[3]
N. Yoshikawa, Y . Asano, D. N. Futaba, K. Harada, T. Hitosugi, G. N. Kanda, S. Matsuda, Y . Nagata, K. Nagato, M. Naito, T. Natsume, K. Nishio, K. Ono, H. Ozaki, W. Shin, J. Shiomi, K. Shizume, K. Takahashi, S. Takeda, I. Takeuchi, R. Tamura, K. Tsuda and Y . Ushiku, Digital Discovery, 2025, 4, 1384-1403
work page 2025
-
[4]
J. Chen, S. R. Cross, L. J. Miara, J. -J. Cho, Y . Wang and W. Sun, Nature Synthesis, 2024, 3, 606- 614
work page 2024
-
[5]
W.-S. Wang, K. Terashima and Y . Takano, Science and Technology of Advanced Materials: Methods, 2026, 6, 2611510
work page 2026
-
[6]
T. Dai, S. Vijayakrishnan, F. T. Szczypinski, J. F. Ayme, E. Simaei, T. Fellowes, R. Clowes, L. Kotopanov, C. E. Shields, Z. Zhou, J. W. Ward and A. I. Cooper, Nature, 2024, 635, 890-897
work page 2024
-
[7]
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser and I. Polosukhin, Advances in neural information processing systems, 2017, 30
work page 2017
-
[8]
D. A. Boiko, R. MacKnight, B. Kline and G. Gomes, Nature, 2023, 624, 570-578
work page 2023
-
[9]
J. Gottweis, W. -H. Weng, A. Daryin, T. Tu, A. Palepu, P. Sirkovic, A. Myaskovsky, F. Weissenberger, K. Rong, R. Tanno, K. Saab, D. Popovici, J. Blum, F. Zhang, K. Chou, A. Hassidim, B. Gokturk, A. Vahdat, P. Kohli and V . Natarajan, arXiv, 2025, https://doi.org/10.48550/arXiv.2502.18864
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2502.18864 2025
-
[10]
K. Swanson, W. Wu, N. L. Bulaong, J. E. Pak and J. Zou, bioRxiv, 2024, https://doi.org/10.1101/2024.11.11.623004
-
[11]
Z. Ji, N. Lee, R. Frieske, T. Y u, D. Su, Y . Xu, E. Ishii, Y . J. Bang, A. Madotto and P. Fung, ACM Computing Surveys, 2023, 55, 1-38
work page 2023
-
[12]
I. M. Dokas, Safety Science, 2026, 194, 107056
work page 2026
- [13]
-
[14]
Z. Li, Z. Wang, W. Wang, K. Hung, H. Xie and F. L. Wang, Computers and Education: Artificial Intelligence, 2025, 8, 100417
work page 2025
- [15]
-
[16]
M. Vaccaro, A. Almaatouq and T. Malone, Nature Human Behaviour, 2024, 8, 2293-2303
work page 2024
-
[17]
Claude Opus 4.6, https://www.anthropic.com/claude/opus, (accessed 2026-03-07.)
work page 2026
-
[18]
N. Reimers and I. Gurevych, Proceedings of the 2019 conference on empirical methods in natural language processing and the 9th international joint conference on natural language processing (EMNLP-IJCNLP), 2019, 3982-3992
work page 2019
-
[19]
Laboratory Equipment and Safety Management Support AI
B. An, S. Zhang and M. Dredze, Proceedings of the 2025 Conference of the Nations of the Americas Chapter of the Association for Computational Linguistics: Human Language Technologies (V olume 1: Long Papers), 2025, 5444-5474. Supplementary Information: Bridging the Experimental Last Mile: Digitizing Laboratory Know-How for Safe AI-Assisted Support Akira M...
work page 2025
-
[20]
Chemical Substance Disclaimer: At the beginning of every response, you must insert the following standard statement: [IMPORTANT] I do not possess specialized knowledge regarding the specific hazards or toxicity of chemical substances. In any experiment, the "properties" and "quantities" of chemical substances have a decisive impact. For reagents you are u...
-
[21]
Warning for First-Time Users: Regardless of the context of the question, convey the following early in your response: "If this is your first time using this equipment, do not rely solely on this AI's advice— be sure to receive in-person instruction from the equipment manager."
-
[22]
Information Limitation (Hallucination Prevention): Use only the information contained in the "Knowledge Base" described below. o If asked about something not in the Knowledge Base: Respond with: "I'm sorry, but that procedure is not described in the materials I have on hand. For safety, please do not make your own judgment— be sure to confirm with the equ...
-
[23]
Equipment-Specific Critical Points XRD (Benchtop MiniFlex) • Startup: Mandatory if there has been a gap of 5 hours or more since last use. • Sample Preparation: Ensure the sample is "perfectly flush (tsuuraichi)" at the center of the window. Surface irregularities cause angle shifts and intensity reduction. • Software: Use SmartLab Studio II. Always inclu...
-
[24]
Operational Rules and Etiquette • Shared USB: Password is "kouzoumuki." Always perform the "Eject" operation on the OS before removing. • Records: Make reservations. For equipment with Google-based reservation systems, accurate entries in the log notebook are mandatory. Response Generation Process and Self -Verification (Thinking Steps) When responding to...
-
[25]
greatest accident risk (damage or injury)
Risk Assessment: Identify the "greatest accident risk (damage or injury)" involved in the operation being asked about
-
[26]
Information Retrieval and Source Verification: o Determine whether the answer to the question is found in an "individual equipment manual" or in the "general rules." o For questions such as "Is this written in the specifications?", rigorously check whether the description actually exists in the specifications
-
[27]
Draft Composition: Construct the procedure including physical sensations (e.g., "turn slowly," "press firmly," etc.)
-
[28]
[IMPORTANT] Hallucination Check: o Cross-reference the procedures in your drafted response against the Knowledge Base descriptions. o Confirm that you have not added information not in the Knowledge Base on the grounds that it is "common practice." o Confirm there are no source misattributions (e.g., presenting a general rule as if it were from an equipme...
-
[29]
Format Application: Output in the specified format. Output Format Responses must always be written in the following format: [IMPORTANT] I do not possess specialized knowledge regarding the specific hazards or toxicity of chemical substances. Please review the SDS (Safety Data Sheet) for the substances you are using and always follow your instructor's dire...
-
[30]
Reservation & Records (include only if described in the Knowledge Base): If the Knowledge Base (procedure manual) contains instructions regarding reservation methods, log notebooks, whiteboards, etc., describe them specifically as "Step 1." If no such instructions exist, omit this item and begin directly with the operating procedure
-
[31]
(From here onward, describe specific operating procedures based on the Knowledge Base. If the synthesis method is unknown, clearly state "No information available" at this point and do not describe any further steps.) ■ Records and Cleanup • (Include only if applicable) Log notebook: Confirm entries • Cleanup: Confirm adherence to "Leave it cleaner than y...
-
[32]
Reservation and Preparation • Reservation: You must secure a time slot on the Google Calendar before using the device (/Miniflex.docx, Section 1-2). • Startup: If the device has been idle for more than 5 hours, a startup procedure is mandatory to protect the X-ray tube (/Miniflex.docx, Section 2-1). • Chiller: Press the green RUN/STOP button on the coolin...
-
[33]
Sample Preparation (TiO₂ Powder) • Holder Selection: Use a glass plate holder for standard powder amounts or a non- reflective holder if the sample amount is very small (/Miniflex.docx, Section 4-1). • Filling: Place approximately one medium spatula-full of TiO₂ powder into the holder window (/Miniflex.docx, Section 4-2). • Flattening ("Tsuraitchi"): Use ...
-
[34]
Place the holder on the highest position teeth of the sample stage
Loading the Sample • Insertion: Open the door (ensure X-rays are OFF). Place the holder on the highest position teeth of the sample stage. Placing it lower will result in incorrect data (/Miniflex.docx, Section 5-1). • Orientation: Ensure the thick/transparent side of the glass is facing the back (/Miniflex.docx, Section 5-1)
-
[35]
Measurement Settings • Software: In SmartLab Studio II, set your save folder and filename (/Miniflex.docx, Section 6-3). • Scan Conditions: While specific TiO₂ parameters are not in the manual, a typical range is 10° to 80°. Use a slower speed (1–5 deg/min) if you need high S/N ratios for structure determination (/Miniflex.docx, Section 6-3). • Automation...
-
[36]
Eject" operation in Windows (/Miniflex.docx, Section 1-2). • Cleanup: Ensure the area is
Shutdown Sequence • Main Unit: Press the gray power button (circle mark) on the front panel (/Miniflex.docx, Section 8-2). • Chiller (Strict Order): Press the RUN/STOP button first, then turn off the black power button. Reversing this order causes errors (/Miniflex.docx, Section 8-3). ■ Record-keeping & Cleanup • Log notebook: You must accurately record y...
-
[37]
予約・記録と事前準備 • 予約: 使用前に必ず Google カレンダー で予約枠を確保してください (/Miniflex.docx, Section 1-2)。 • チラー起動: 冷却水循環装置の緑色の RUN/STOP ボタンを押し、駆動音を確認し ます (/Miniflex.docx, Section 3-1)。 • 本体・PC 起動: MiniFlex 本体前面の緑色の電源ボタン(縦線マーク)を押し、PC で SmartLab Studio II を起動します (/Miniflex.docx, Section 3-2)。 • Startup: 前回の使用から 5 時間以上経過している場合は、管球保護のため必ず Startup を実行してください (/Miniflex.docx, Section 2-1)。
-
[38]
試料調製(TiO₂粉末) • ホルダー選定: 通常の粉末測定では ガラス板ホルダー を使用します (/Miniflex.docx, Section 4-1)。 • 充填: 中サイズのスパチュラ約 1 杯分の TiO₂粉末をホルダーの窓に盛ります (/Miniflex.docx, Section 4-2)。 • 平滑化(ツライチ): 別のガラス板で粉末を押し当て、スライドさせて表面を平ら にします 。**「ツライチ(面一) 」**になっていないと、ピーク角度のズレや強度 低下の原因になります (/Miniflex.docx, Section 4-2)。
-
[39]
試料のセット • 高さの選択(最重要): 試料ステージの 「一番高い位置の歯」 の上にホルダーを載 せてください。低い位置に載せると正しいデータが得られません (/Miniflex.docx, Section 5-1)。 • 向き: ガラスの厚みがある側(または透明な面)を奥側にして差し込みます (/Miniflex.docx, Section 5-1)。
-
[40]
測定設定と実行 • 条件設定: SmartLab Studio II で保存先とファイル名を設定します 。スキャンスピー ドは、構造決定のために S/N 比を上げたい場合は 1~5 deg/min 程度の遅めに設定 することを推奨します (/Miniflex.docx, Section 6-3)。 • 自動化: 測定フローの最後には必ず 「Shutdown」 コマンドを入れ、X 線 OFF とド アロック解除が自動で行われるようにしてください (/Miniflex.docx, Section 7-1)。
-
[41]
Scoring rubric for evaluation A
終了処理 • 本体電源: 前面のグレーの電源ボタン(丸マーク)を押して OFF にします (/Miniflex.docx, Section 8-2)。 • チラー停止(順序厳守): まず RUN/STOP ボタンを押し、その後に 黒い電源ボタ ン を切ります 。逆の順序で行うとエラーの原因になります (/Miniflex.docx, Section 8-3)。 ■ 記録と後片付け • ログノート: 測定開始時刻と使用実績を正確に記入してください (/Miniflex.docx, Section 1-2, 7-2)。 • データ移動: 共用 USB(パスワード: kouzoumuki)を使用し、OS 上での「取り出 し」操作を必ず行ってください (/Miniflex.docx, Section 1-2)。 ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.