EEG-Based Emergency Braking Intensity Prediction Using Blind Source Separation
Pith reviewed 2026-05-10 03:47 UTC · model grok-4.3
The pith
Modeling EEG signals as mixtures of independent sources isolates braking-related brain components for 200 ms ahead intensity prediction.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
EEG signals are modeled as mixtures of independent blind sources. Independent component analysis decomposes the multichannel recordings, after which time-frequency analysis and Pearson correlation with braking events select the relevant components. Hierarchical clustering then partitions these into two groups that share distinct spatial topographies yet exhibit trial-invariant temporal patterns and stable neural signatures of the emergency braking process. Power features drawn from the clustered components, combined with historical braking data, enable prediction of braking intensity at a 200 ms horizon.
What carries the argument
Independent component analysis (ICA) decomposition of EEG, followed by time-frequency analysis, Pearson-correlation selection of braking-linked components, and hierarchical clustering into two spatial-pattern clusters.
If this is right
- Power features from the two clustered components, together with past braking values, support braking-intensity forecasts at a 200 ms horizon.
- The retained components display consistent spatial patterns and trial-invariant temporal dynamics across braking events.
- Prediction error falls 8.0 percent on an open-source dataset and 23.8 percent in human-in-the-loop simulation relative to prior approaches.
- The two clusters correspond to distinct spatial aspects of the neural braking signature.
Where Pith is reading between the lines
- The same source-separation steps could be tested on EEG recorded during other continuous driving tasks such as steering corrections or throttle modulation.
- If the components remain stable across varied road conditions and driver populations, they might serve as inputs for real-time brain-computer-interface alerts in production vehicles.
- The trial-invariant temporal structure offers a concrete target for follow-up studies that relate the clusters to established motor-preparation or decision circuits.
Load-bearing premise
The components retained after ICA and correlation filtering reflect causal neural activity in the braking process itself rather than correlated noise, muscle artifacts, or patterns specific only to the training recordings.
What would settle it
If a new dataset or subject group shows that prediction error is no lower when using the ICA-selected and clustered components than when using raw EEG channels or standard artifact-removal pipelines alone.
Figures












read the original abstract
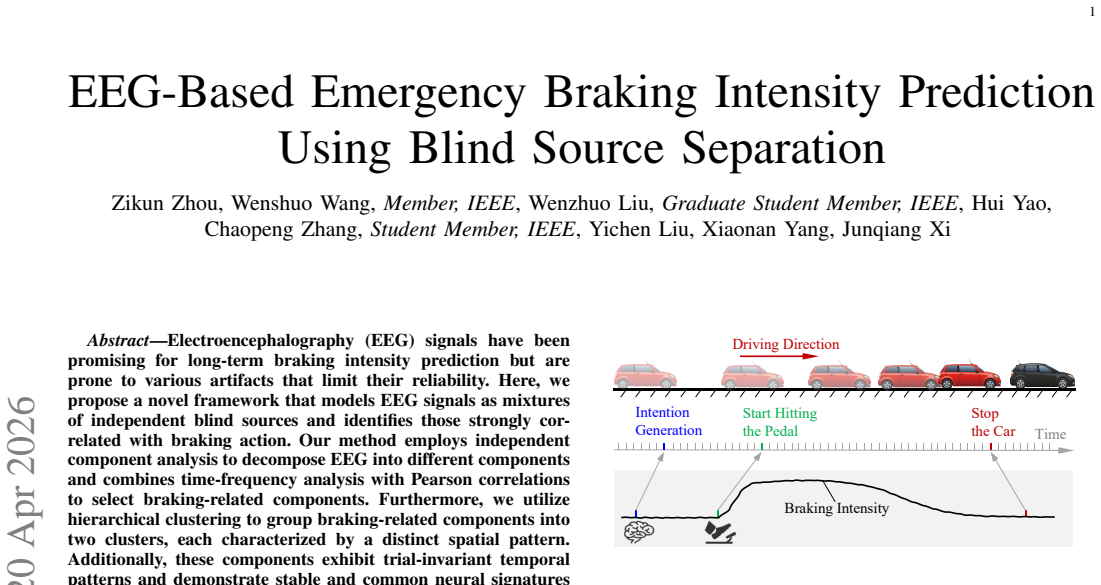
Electroencephalography (EEG) signals have been promising for long-term braking intensity prediction but are prone to various artifacts that limit their reliability. Here, we propose a novel framework that models EEG signals as mixtures of independent blind sources and identifies those strongly correlated with braking action. Our method employs independent component analysis to decompose EEG into different components and combines time-frequency analysis with Pearson correlations to select braking-related components. Furthermore, we utilize hierarchical clustering to group braking-related components into two clusters, each characterized by a distinct spatial pattern. Additionally, these components exhibit trial-invariant temporal patterns and demonstrate stable and common neural signatures of the emergency braking process. Using power features from these components and historical braking data, we predict braking intensity at a 200 ms horizon. Evaluations on the open source dataset (O.D.) and human-in-the-loop simulation (H.S.) show that our method outperforms state-of-the-art approaches, achieving RMSE reductions of 8.0% (O.D.) and 23.8% (H.S.).
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an EEG-based framework for predicting emergency braking intensity at a 200 ms horizon. EEG signals are decomposed via independent component analysis (ICA); braking-related components are identified using time-frequency features and Pearson correlation with braking labels; hierarchical clustering groups these into two clusters claimed to exhibit distinct spatial patterns, trial-invariant temporal patterns, and stable neural signatures. Power features extracted from the selected components, combined with historical braking data, are then used for prediction. On an open-source dataset (O.D.) and a human-in-the-loop simulation (H.S.), the approach is reported to outperform state-of-the-art methods with RMSE reductions of 8.0% and 23.8%, respectively.
Significance. If the component selection and clustering steps can be shown to isolate causally predictive neural sources rather than dataset-specific correlations or artifacts, and if the performance gains hold under rigorous cross-validation, the work could contribute to more reliable EEG decoding for real-time driver assistance systems. The dual evaluation on public and simulated data is a positive step toward assessing practical utility, though the current lack of methodological transparency limits the strength of this contribution.
major comments (3)
- [Abstract] Abstract: The reported RMSE reductions (8.0% on O.D., 23.8% on H.S.) are presented without any description of the baseline models, prediction architecture, hyperparameter choices, cross-validation procedure, or statistical significance tests. This omission makes it impossible to determine whether the gains reflect genuine improvement or differences in implementation, data partitioning, or post-hoc tuning.
- [Abstract] Component selection and clustering (described in Abstract): Selecting ICA components via Pearson correlation with the target braking-intensity labels and then performing hierarchical clustering on the same data introduces a clear risk of label leakage and overfitting if these steps are not isolated from test evaluation via nested cross-validation. Without explicit confirmation that component identification was performed only on training folds, the generalization claims and the reported RMSE improvements rest on an unverified assumption.
- [Abstract] Evaluation (implied in Abstract): The claim that the two clusters show 'trial-invariant temporal patterns and stable and common neural signatures' is asserted without quantitative support such as intra-cluster similarity scores, consistency metrics across subjects/trials, or statistical tests comparing within- versus between-cluster variability.
minor comments (2)
- [Abstract] The acronyms O.D. and H.S. are used without definition in the Abstract; they should be expanded on first use.
- [Abstract] The manuscript would benefit from a clearer statement of the exact prediction model (e.g., regression type) and feature extraction details once the components are selected.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We have addressed each major comment point by point below, providing clarifications where needed and making revisions to improve methodological transparency and quantitative support. All changes are incorporated in the revised version.
read point-by-point responses
-
Referee: [Abstract] Abstract: The reported RMSE reductions (8.0% on O.D., 23.8% on H.S.) are presented without any description of the baseline models, prediction architecture, hyperparameter choices, cross-validation procedure, or statistical significance tests. This omission makes it impossible to determine whether the gains reflect genuine improvement or differences in implementation, data partitioning, or post-hoc tuning.
Authors: We agree that the abstract is overly concise and should reference the evaluation details to substantiate the reported gains. The full manuscript describes the baseline models (prior EEG decoding approaches for braking), the prediction architecture (power features from selected ICA components concatenated with historical braking intensity as input to a regression model), hyperparameter selection via grid search within CV, the cross-validation procedure (nested subject-independent folds), and statistical significance via paired tests. We have revised the abstract to include a brief summary of these elements and added explicit pointers to the Methods and Results sections for full transparency. revision: yes
-
Referee: [Abstract] Component selection and clustering (described in Abstract): Selecting ICA components via Pearson correlation with the target braking-intensity labels and then performing hierarchical clustering on the same data introduces a clear risk of label leakage and overfitting if these steps are not isolated from test evaluation via nested cross-validation. Without explicit confirmation that component identification was performed only on training folds, the generalization claims and the reported RMSE improvements rest on an unverified assumption.
Authors: We acknowledge the importance of avoiding label leakage in component selection. Our pipeline applies ICA decomposition, Pearson correlation-based selection, and hierarchical clustering exclusively within the training folds of a nested cross-validation scheme; test folds are held out entirely and never influence component identification or clustering. This was implemented to ensure generalization. We have added explicit confirmation of the nested CV procedure in the Methods section and a clarifying statement in the abstract to address this concern directly. revision: yes
-
Referee: [Abstract] Evaluation (implied in Abstract): The claim that the two clusters show 'trial-invariant temporal patterns and stable and common neural signatures' is asserted without quantitative support such as intra-cluster similarity scores, consistency metrics across subjects/trials, or statistical tests comparing within- versus between-cluster variability.
Authors: The manuscript presents supporting evidence through time-frequency visualizations and qualitative descriptions of pattern consistency across trials and subjects in the Results section. However, we agree that explicit quantitative metrics strengthen the claims. In the revision, we have added intra-cluster similarity scores (e.g., average pairwise correlations), cross-trial/subject consistency metrics, and statistical comparisons (within- vs. between-cluster variability via permutation tests) to provide rigorous quantitative backing for the cluster properties. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper describes a standard supervised pipeline: ICA decomposition of EEG, followed by time-frequency analysis plus Pearson correlation to select components correlated with braking intensity, hierarchical clustering of those components, extraction of power features, and use of those features plus historical data to train a predictor for future braking intensity. No equation or step reduces the final prediction output to the selection criterion by construction (e.g., the predictor is not simply re-reporting the Pearson correlation used for selection). Component selection is a preprocessing choice whose validity depends on proper cross-validation and generalization testing, but the paper's claimed performance gains are presented as empirical results on held-out evaluations rather than tautological re-derivations of the inputs. No self-citation load-bearing steps, uniqueness theorems, or ansatz smuggling are present in the provided text. The derivation remains self-contained as a proposed feature-engineering pipeline evaluated on external datasets.
Axiom & Free-Parameter Ledger
free parameters (3)
- Number of independent components
- Correlation threshold for braking-related component selection
- Number of clusters in hierarchical clustering
axioms (2)
- domain assumption EEG signals can be modeled as linear mixtures of statistically independent sources
- domain assumption Braking-related neural activity produces detectable, trial-invariant temporal and spatial patterns in selected components
Reference graph
Works this paper leans on
-
[1]
X. Wang, X. Zhang, F. Guo, Y .Gu, and X. Zhu, “Effect of daily car-following behaviors on urban roadway rear-end crashes and near- crashes:A naturalistic driving study,”Accident Anal. Prevention, vol. 164, Jan. 2022, Art. no. 106502
work page 2022
-
[2]
Towards rear-end collision avoidance:Adaptive beaconing for connected vehicles,
F. Lyu, N. Cheng, H. Zhu, H. Zhou, W. Xu, M. Li, and X. Shen, “Towards rear-end collision avoidance:Adaptive beaconing for connected vehicles,”IEEE Trans. Intell. Transp. Syst., vol. 22, no. 2, pp. 1248-–1263, Feb. 2021
work page 2021
-
[3]
S. S. Gunjate and S. A. Khot, “A systematic review of emergency braking assistant system to avoid accidents using pulse width modulation and fuzzy logic control integrated with antilock braking,”Int. J. Automot. Mech. Eng., vol. 20, no. 2, pp. 10457-–10479, Jul. 2023
work page 2023
-
[4]
K. D. Kusano and H. C. Gabler, “Safety benefits of forward collision warning, brake assist, and autonomous braking systems in rear-end collisions,”IEEE Trans. Intell. Transp. Syst., vol. 13, no. 4, pp. 1546- –1555, Dec. 2012
work page 2012
-
[5]
K.-R. Müller, M. Tangermann, G. Dornhege, M. Krauledat, G. Cu- rio, and B. Blankertz, “Machine learning for real-time single-trial eeg analysis:from brain–computer interfacing to mental state monitoring,”J. Neurosci. Methods, vol. 167, no. 1, pp. 82-–90, Jan. 2008
work page 2008
-
[6]
Eeg-based detection of driver emergency brak- ing intention for brain-controlled vehicles,
T. Teng, L. Bi, and Y . Liu, “Eeg-based detection of driver emergency brak- ing intention for brain-controlled vehicles,”IEEE Trans. Intell. Transp. Syst., vol. 19, no. 6, pp. 1766-–1773, Jun. 2018
work page 2018
-
[7]
Recognition of drivers’ hard and soft braking intentions based on hybrid brain-computer interfaces,
J. Ju, A. G. Feleke, L. Luo, and X. Fan, “Recognition of drivers’ hard and soft braking intentions based on hybrid brain-computer interfaces,” Cyborg Bionic Syst., Jan. 2022
work page 2022
-
[8]
H. Wang, L. Bi, and T. Teng, “Eeg-based emergency braking intention prediction for brain-controlled driving considering one electrode falling off,” inProc. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. (EMBS), Jul. 2017, pp. 2494-–2497
work page 2017
-
[9]
I.-H. Kim, J.-W. Kim, S. Haufe, and S.-W. Lee, “Detection of braking intention in diverse situations during simulated driving based on eeg feature combination,”J. Neural Eng., vol. 12, no. 1, p. 016001, Nov. 2014
work page 2014
-
[10]
Eeg-based emergency braking intention detection during simulated driving,
X. Liang, Y . Yu, Y . Liu, K. Liu, Y . Liu, and Z. Zhou, “Eeg-based emergency braking intention detection during simulated driving,”Biomed. Eng. Online, vol. 22, no. 1, p. 65, Jul. 2023
work page 2023
-
[11]
H. J. Mora and E. J. Pino, “Simplified prediction method for detecting the emergency braking intention using eeg and a cnn trained with a 2d matrices tensor arrangement,”Int. J. Hum.-Comput. Interact., vol. 39, no. 3, pp. 587-–600, Apr. 2023
work page 2023
-
[12]
N. Lutes, V . S. S. Nadendla, and K. Krishnamurthy, “Convolutional spiking neural networks for intent detection based on anticipatory brain potentials using electroencephalogram,”Sci. Rep., vol. 14, no. 1, p. 8850, Apr. 2024
work page 2024
-
[13]
W. Liu et al., “MMTL-UniAD:A unified framework for multimodal and multi-task learning in assistive driving perception,” 2025,arXiv :2504.02264
-
[14]
W. Liu et al., “UV-M3TL:A unified and versatile multimodal multi- task learning framework for assistive driving perception,” 2026,arXiv :2602.01594
-
[15]
Decision of braking intensity during simulated driving based on analysis of neural correlates,
J.-W. Kim, I.-H. Kim, and S.-W. Lee, “Decision of braking intensity during simulated driving based on analysis of neural correlates,” inProc. IEEE Int. Conf. Syst. Man Cybern. (SMC), Apr. 2014, pp. 4129—4132
work page 2014
-
[16]
F. Zhang, L. Dong, L. Zhang, X. Zhang, and X. Jiao, “Genera- tive AI-Enhanced Multi-Physiological Signal Analysis for Intelligent Transportation Safety:An Attention-Masked Transformer Approach,” IEEE Trans. Intell. Transp. Syst., early access, pp. 1–12, 2025, doi:10.1109/TITS.2025.3554808
-
[17]
P. Li, G. Qi, S. Zhao, and W. Guan, “Assessing the effects of artifacts and noise in eeg signals on car-following driving behavior prediction,” Biomed. Signal Process. Control, vol. 100, p. 106922, Feb. 2025
work page 2025
-
[18]
Alertness Estimation Using Connection Parameters of the Brain Network,
M. Wang, C. Ma, Z. Li, S. Zhang, and Y . Li, “Alertness Estimation Using Connection Parameters of the Brain Network,”IEEE Trans. Intell. Transp. Syst., vol. 23, no. 12, pp. 25448–25457, Dec. 2022
work page 2022
-
[19]
S. J. Luck,An introduction to the event-related potential technique. MIT press, 2014
work page 2014
-
[20]
Creativity comes in waves: an eeg-focused exploration of the creative brain,
C. E. Stevens Jr and D. L. Zabelina, “Creativity comes in waves: an eeg-focused exploration of the creative brain,”Curr . Opin. Behav. Sci., vol. 27, pp. 154–162, Jun. 2019
work page 2019
-
[21]
G. Ouyang, A. Hildebrandt, F. Schmitz, and C. S. Herrmann, “Decom- posing alpha and 1/f brain activities reveals their differential associations with cognitive processing speed,”NeuroImage, vol. 205, p. 116304, Jan. 2020
work page 2020
-
[22]
Time-frequency analysis methods and their application in developmental eeg data,
S. Morales and M. E. Bowers, “Time-frequency analysis methods and their application in developmental eeg data,”Dev. Cognit. Neurosci., vol. 54, p. 101067, Apr. 2022
work page 2022
-
[23]
F. Vecchio, L. Nucci, C. Pappalettera, F. Miraglia, D. Iacoviello, and P. M. Rossini, “Time-frequency analysis of brain activity in response to directional and non-directional visual stimuli:an event related spectral perturbations (ersp) study,”J. Neural Eng., vol. 19, no.6, p. 066004, Nov. 2022
work page 2022
-
[24]
Erp features and eeg dynamics:an ica perspective,
S. Makeig, J. Onton, et al., “Erp features and eeg dynamics:an ica perspective,”Oxford handbook of event-related potential components, pp. 51–86, 2011
work page 2011
-
[25]
Estimating mutual information,
A. Kraskov, H. Stögbauer, and P. Grassberger, “Estimating mutual information,”Phys. Rev. E: Stat. Nonlinear Soft Matter Phys., vol. 69, no.6, p. 066138, Jun. 2004
work page 2004
-
[26]
An information-maximization approach to blind separation and blind deconvolution,
A. J. Bell and T. J. Sejnowski, “An information-maximization approach to blind separation and blind deconvolution,”Neural Comput., vol. 7, no.6, pp. 1129–1159, Nov. 1995
work page 1995
-
[27]
Papoulis,Random variables and stochastic processes
A. Papoulis,Random variables and stochastic processes. New York, NY , USA:McGraw Hill, 1965
work page 1965
-
[28]
Ocular artifacts elimination from multivariate eeg signal using frequency-spatial filtering,
A. Bhattacharyya, A. Verma, R. Ranta, and R. B. Pachori, “Ocular artifacts elimination from multivariate eeg signal using frequency-spatial filtering,”IEEE Trans. Cognit. Dev. Syst., vol. 15, no.3, pp. 1547–1559, Sep. 2022
work page 2022
-
[29]
L. Pion-Tonachini, K. Kreutz-Delgado, and S. Makeig, “Iclabel: An automated electroencephalographic independent component classifier, dataset, and website,”NeuroImage, vol. 198, pp. 181–197, Sep. 2019
work page 2019
-
[30]
Source aware deep learning framework for hand kinematic reconstruction using eeg signal,
S. Pancholi, A. Giri, A. Jain, L. Kumar, and S. Roy, “Source aware deep learning framework for hand kinematic reconstruction using eeg signal,” IEEE Trans. Cybern., vol. 53, no. 7, pp. 4094–4106, Jul. 2023
work page 2023
-
[31]
Delving deep into rectifiers:Surpassing human-level performance on imagenet classifica- tion,
K. He, X. Zhang, S. Ren, and J. Sun, “Delving deep into rectifiers:Surpassing human-level performance on imagenet classifica- tion,” inProc. IEEE Int. Conf. Comput. Vis. (ICCV), Dec. 2015, pp. 1026—1034
work page 2015
-
[32]
Adam: A Method for Stochastic Optimization
D. P. Kingma, “Adam:A method for stochastic optimization,” 2014, arXiv:1412.6980
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[33]
Eeg potentials predict upcoming emergency brakings during simulated driving,
S. Haufe, M. S. Treder, M. F. Gugler, M. Sagebaum, G. Curio, and B. Blankertz, “Eeg potentials predict upcoming emergency brakings during simulated driving,”J. Neural Eng., vol. 8, no. 5, p. 056001, Jul. 2011
work page 2011
-
[34]
Cross-scenario vigi- lance detection based on eeg analysis for safety driving in autonomous,
D. Gao, X. Tao, X. Wu, B. Du, Y . Qin, and J. Lu, “Cross-scenario vigi- lance detection based on eeg analysis for safety driving in autonomous,” IEEE Trans. Intell. Transp. Syst., vol. 26, no. 8, pp. 11404–11419, Aug. 2025
work page 2025
-
[35]
F. Hu, L. Zhang, X. Yang, and W. -A. Zhang, “EEG-based driver fatigue detection using spatio-temporal fusion network with brain region partitioning strategy,”IEEE Trans. Intell. Transp. Syst., vol. 25, no. 8, pp. 9618–9630, Aug. 2024
work page 2024
-
[36]
Investigat- ing the cognitive response of brake lights in initiating braking action using eeg,
R. Palaniappan, S. Mouli, H. Bowman, and I. McLoughlin, “Investigat- ing the cognitive response of brake lights in initiating braking action using eeg,”IEEE Trans. Intell. Transp. Syst., vol. 23, no. 8, pp. 13878–13883, Aug. 2022
work page 2022
-
[37]
X. Lyu, M. Azeem Akbar, S. Manimurugan, and H. Jiang, “Driver Fatigue Warning Based on Medical Physiological Signal Monitoring for Transportation Cyber-Physical Systems,”IEEE Trans. Intell. Transp. Syst., vol. 26, no. 9, pp. 14237–14249, Sep. 2025
work page 2025
-
[38]
A. Delorme and S. Makeig, “Eeglab: an open source toolbox for analysis of single-trial eeg dynamics including independent component analysis,” J. Neurosci. Methods, vol. 134, no. 1, pp. 9–21, Mar. 2004. 12
work page 2004
-
[39]
Principal component analysis:A natural approach to data exploration,
F. L. Gewers, G. R. Ferreira, H. F. D. Arruda, F. N. Silva, C. H. Comin, D. R. Amancio, and L. d. F. Costa, “Principal component analysis:A natural approach to data exploration,”ACM Comput. Surv., vol. 54, no. 4, pp. 1–34, May 2021
work page 2021
-
[40]
A statistical method for evaluating systematic relationships,
R. R. Sokal,et al., “A statistical method for evaluating systematic relationships,”J. Neurosci. Methods, vol. 134, no. 1, pp. 9–21, Mar. 2004
work page 2004
-
[41]
A. Li, C. Fan, F. Xiao, and Z. Chen, “Distance measures in building informatics:An in-depth assessment through typical tasks in building energy management,”Energy Build., vol. 258, Mar. 2022, Art. no.111817
work page 2022
-
[42]
The end in sight:A look at the occipital lobe,
O. Leon Nehmad, “The end in sight:A look at the occipital lobe,”Clin. Eye Vision Care, vol. 10, no. 3, pp. 125–133, Sep. 1998
work page 1998
-
[43]
P. Thier, H.-O. Karnath,Parietal lobe contributions to orientation in 3D space. Heidelberg, Germany:Springer Verlag, 1997
work page 1997
-
[44]
Monitoring and control of action by the frontal lobes,
J. D. Schall, V . Stuphorn, and J. W. Brown, “Monitoring and control of action by the frontal lobes,”Neuron, vol. 36, no. 2, pp. 309–322, Oct. 2002
work page 2002
-
[45]
Frontoparietal control of spatial attention and motor intention in human eeg,
P. Praamstra, L. Boutsen, and G. W. Humphreys, “Frontoparietal control of spatial attention and motor intention in human eeg,”J. Neurophysiol., vol. 94, no. 1, pp. 764–774, Jul. 2005
work page 2005
-
[46]
Sensing limb movements in the motor cortex: how humans sense limb movement,
E. Naito, “Sensing limb movements in the motor cortex: how humans sense limb movement,”The Neuroscientist, vol. 10, no. 1, pp. 73–82, Feb. 2004
work page 2004
-
[47]
How many electrodes are really needed for EEG-based mobile brain imaging?
T. M. Lau, J. T. Gwin, and D. P. Ferris, “How many electrodes are really needed for EEG-based mobile brain imaging?”J. Behav. Brain Sci., vol. 2, 2012, Art. no. 22107
work page 2012
-
[48]
Efficient csp algorithm with spatio-temporal filtering for motor imagery classification,
A. Jiang, J. Shang, X. Liu, Y . Tang, H. K. Kwan, and Y . Zhu, “Efficient csp algorithm with spatio-temporal filtering for motor imagery classification,”IEEE Trans. Neural Syst. Rehabil. Eng., vol. 28, pp. 1006– 1016, Apr. 2020
work page 2020
-
[49]
Complex common spatial patterns on time-frequency decomposed EEG for brain-computer interface,
V . Mishuhina, and X. Jiang, “Complex common spatial patterns on time-frequency decomposed EEG for brain-computer interface,”Pattern Recognit., vol. 115, p. 107918, Jul. 2021
work page 2021
-
[50]
CTSSP: A Temporal-Spectral-Spatio Joint Optimization Algorithm for Motor Imagery EEG Decoding,
L. Pan, K. Wang, W. Yi, Y . Zhang, M. Xu, and D. Ming, “CTSSP: A Temporal-Spectral-Spatio Joint Optimization Algorithm for Motor Imagery EEG Decoding,”Authorea Preprints, Apr. 2025
work page 2025
-
[51]
Spectrally Adaptive Common Spatial Patterns,
M. Mousavi, E. Lybrand, S. Feng, S. Tang, R. Saab, and Virginia R. de Sa, “Spectrally Adaptive Common Spatial Patterns,” 2022,arXiv: 2202.04542
-
[52]
Analysis of epileptic eeg signals by using dynamic mode decomposition and spectrum,
O. K. Cura and A. Akan, “Analysis of epileptic eeg signals by using dynamic mode decomposition and spectrum,”Biocybern. Biomed. Eng., vol. 41, no. 1, pp. 28–44, Jan. 2021
work page 2021
-
[53]
J. N. Kutz, S. L. Brunton, B. W. Brunton, and J. L. Proctor,Dynamic mode decomposition: data-driven modeling of complex systems. Philadel- phia, PA, USA:SIAM, 2016
work page 2016
-
[54]
A data–driven approximation of the koopman operator: Extending dynamic mode de- composition,
M. O. Williams, I. G. Kevrekidis, and C. W. Rowley, “A data–driven approximation of the koopman operator: Extending dynamic mode de- composition,”J. Nonlinear Sci., vol. 25, pp.1307–1346, Jun. 2015
work page 2015
-
[55]
Physics-informed dynamic mode decomposition,
P. J. Baddoo, B. Herrmann, B. J. McKeon, J. Nathan Kutz, and S. L. Brunton, “Physics-informed dynamic mode decomposition,”Proc. Royal Soc. A, vol. 479, p. 20220576, Mar. 2023
work page 2023
-
[56]
Subspace dynamic mode decomposition for stochastic Koopman analysis,
N. Takeishi, Y . Kawahara, and T. Yairi, “Subspace dynamic mode decomposition for stochastic Koopman analysis,”Phys. Rev. E, vol. 96, no. 3, p. 033310, Jun. 2017
work page 2017
-
[57]
B. W.Brunton, L. A. Johnson, J. G. Ojemann, and J. N. Kutz, “Extracting spatial-temporal coherent patterns in large-scale neural recordings using dynamic mode decomposition,”J. Neurosci. Methods, vol. 258, pp. 1–15, Jan. 2016
work page 2016
-
[58]
G. Vecchiatoet al., “Electroencephalographic time-frequency patterns of braking and acceleration movement preparation in car driving simulation,” Brain Res., vol. 1716, pp. 16–26, Aug. 2019
work page 2019
-
[59]
P. Welch, “The use of fast fourier transform for the estimation of power spectra:A method based on time averaging over short, modified periodograms,”IEEE Trans. Audio Electroacoust., vol. 15, no. 2, pp. 70– 73, Jun. 1967. Zikun Zhoureceived B.S. degree in Vehicle Engi- neering from Beijing Institute of Technology, Bei- jing, China, in 2023, where he is cu...
work page 1967
-
[60]
He received his master’s degree in computer science and technology from China University of Mining and Technology (Beijing). He was a joint student at the State Key Laboratory of Intelligent Green Vehicles and Mobility, School of Vehicle and Mobility, Tsinghua University for three years. Cur- rently, he is a PhD candidate at the State Key Labo- ratory of ...
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.