Real-Time Algorithms for Model Predictive Control of Hybrid Dynamical Systems
Pith reviewed 2026-05-10 04:12 UTC · model grok-4.3
The pith
Real-time MPC for hybrid systems solves quadratic programs with complementarity constraints to approximate discontinuous feedback laws with bounded error.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
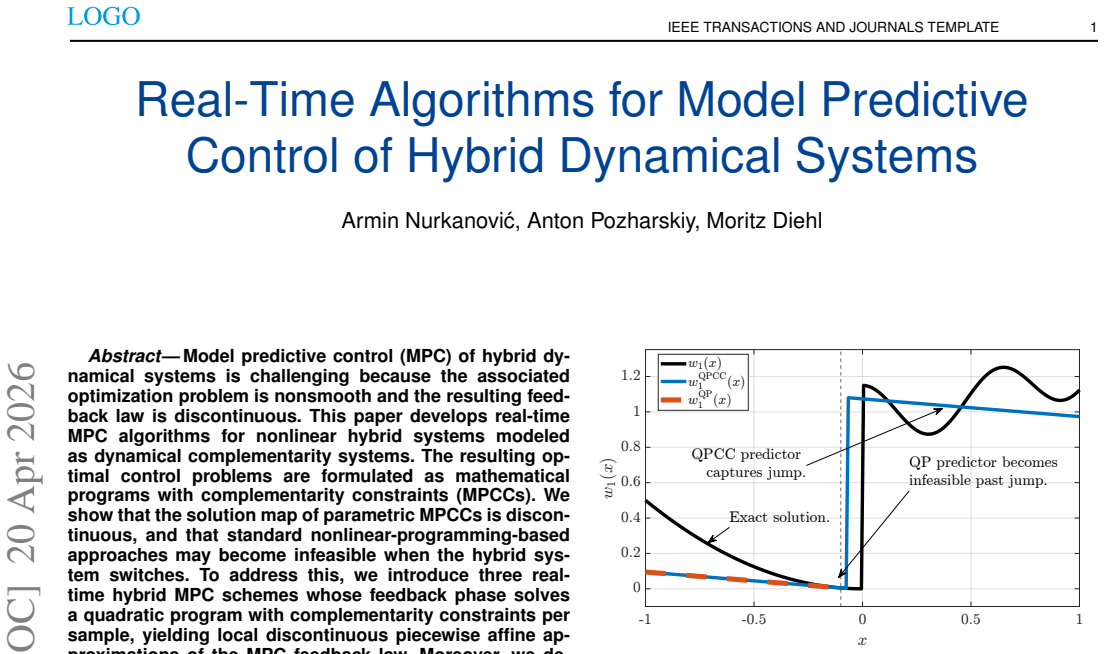
We introduce three real-time hybrid MPC schemes whose feedback phase solves a quadratic program with complementarity constraints per sample, yielding local discontinuous piecewise affine approximations of the MPC feedback law. We derive continuity and differentiability results for parametric MPCCs, and establish conditions under which the approximation error of our new hybrid MPC algorithms remains uniformly bounded despite solution discontinuities.
What carries the argument
Quadratic program with complementarity constraints solved in the feedback phase, which produces local piecewise affine approximations to the discontinuous solution map of the underlying MPCC.
If this is right
- The feedback phase remains feasible and computable even when the hybrid system switches between modes.
- The approximation error of the real-time law stays uniformly bounded under the derived conditions on the MPCC solution map.
- Contact sequences in manipulation tasks can be discovered automatically during online operation without pre-specification.
- Standard NLP-based real-time MPC may lose feasibility at switches while the new QPCC-based schemes do not.
Where Pith is reading between the lines
- The continuity results for parametric MPCCs could be reused in other control or optimization settings that encounter complementarity constraints.
- The piecewise affine local approximations might be combined with explicit MPC techniques to reduce online computation further.
- If the boundedness conditions fail in practice, one could add regularization or switching logic to restore stability.
- These schemes open the door to real-time MPC on systems with many discrete modes, such as legged robots or automated vehicles.
Load-bearing premise
The hybrid systems of interest can be represented accurately as dynamical complementarity systems and the stated conditions for uniform boundedness of the approximation error hold for the applications of interest.
What would settle it
A numerical test on a hybrid system with frequent switches where the real-time feedback deviates from the offline optimal MPC solution by an amount that grows without bound as sampling time decreases or near discontinuity points.
Figures



read the original abstract
Model predictive control (MPC) of hybrid dynamical systems is challenging because the associated optimization problem is nonsmooth and the resulting feedback law is discontinuous. This paper develops real-time MPC algorithms for nonlinear hybrid systems modeled as dynamical complementarity systems. The resulting optimal control problems are formulated as mathematical programs with complementarity constraints (MPCCs). We show that the solution map of parametric MPCCs is discontinuous, and that standard nonlinear-programming-based approaches may become infeasible when the hybrid system switches. To address this, we introduce three real-time hybrid MPC schemes whose feedback phase solves a quadratic program with complementarity constraints per sample, yielding local discontinuous piecewise affine approximations of the MPC feedback law. Moreover, we derive continuity and differentiability results for parametric MPCCs, and establish conditions under which the approximation error of our new hybrid MPC algorithms remains uniformly bounded despite solution discontinuities. The algorithms are demonstrated on a robotic manipulation example, where contact sequences are discovered online.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops real-time MPC algorithms for nonlinear hybrid dynamical systems modeled as dynamical complementarity systems. Optimal control problems are cast as MPCCs, which are shown to have discontinuous solution maps. Three new schemes are introduced whose feedback phase solves a QP with complementarity constraints at each sample, producing local discontinuous piecewise-affine approximations to the MPC feedback law. Continuity and differentiability results are derived for parametric MPCCs, together with conditions guaranteeing that the approximation error remains uniformly bounded despite solution discontinuities. The algorithms are illustrated on a robotic manipulation example in which contact sequences are discovered online.
Significance. If the regularity conditions hold, the work supplies a principled route to real-time feedback for hybrid systems whose mode switches produce discontinuities, with explicit error bounds that standard NLP-based MPC lacks. The derivation of continuity/differentiability properties for parametric MPCCs and the construction of three distinct real-time schemes constitute concrete technical contributions that could be useful in contact-rich robotics and other hybrid control settings.
major comments (2)
- [the section establishing bounded-error conditions for the hybrid MPC schemes] The uniform-boundedness claim for the approximation error (established after the continuity/differentiability results for parametric MPCCs) rests on strong regularity, non-degeneracy of the complementarity constraints, and Lipschitz continuity of the solution map away from jumps. In the robotic manipulation demonstration the contact sequence is discovered online, yet no verification is provided that these regularity conditions are satisfied at every discovered switch; only performance on the shown trajectories is reported. If any switch violates the conditions, the uniform error bound fails and the theoretical guarantee for the real-time schemes does not apply.
- [the algorithmic description of the three schemes] The three real-time schemes are stated to yield local discontinuous PWA approximations, but the precise relationship between the QP-with-complementarity-constraints subproblem solved at each sample and the original MPCC is not shown to preserve the derived continuity/differentiability properties when the hybrid system switches. A concrete counter-example or additional assumption would be needed to confirm that the feedback-phase QP remains well-posed and the error bound carries over.
minor comments (3)
- [Introduction and algorithmic section] The abstract states that three schemes are introduced, but the body does not clearly delineate their differences (e.g., warm-starting strategy, constraint linearization, or handling of active-set changes) until late in the algorithmic section; an early comparison table would improve readability.
- [preliminaries on MPCCs] Notation for the complementarity constraints and the parametric MPCC is introduced without an explicit list of standing assumptions (e.g., LICQ, MFCQ, or strong regularity) that are later invoked; collecting these in a single preliminary subsection would reduce cross-referencing.
- [numerical demonstration] The robotic example would benefit from an additional plot or table quantifying the realized approximation error across multiple random initial conditions and contact sequences, rather than only trajectory snapshots, to give visual support for the uniform-boundedness claim.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on our manuscript. We address each major comment point by point below, indicating planned revisions where appropriate.
read point-by-point responses
-
Referee: [the section establishing bounded-error conditions for the hybrid MPC schemes] The uniform-boundedness claim for the approximation error (established after the continuity/differentiability results for parametric MPCCs) rests on strong regularity, non-degeneracy of the complementarity constraints, and Lipschitz continuity of the solution map away from jumps. In the robotic manipulation demonstration the contact sequence is discovered online, yet no verification is provided that these regularity conditions are satisfied at every discovered switch; only performance on the shown trajectories is reported. If any switch violates the conditions, the uniform error bound fails and the theoretical guarantee for the real-time schemes does not apply.
Authors: We agree that explicit verification of the regularity conditions would strengthen the link between the theoretical guarantees and the numerical demonstration. The bounded-error result relies on these conditions holding at the relevant points. In the revised version, we will add a short subsection to the robotic manipulation example that examines the discovered contact sequences and confirms (or discusses the satisfaction of) strong regularity, non-degeneracy, and local Lipschitz continuity of the solution map for the reported trajectories. revision: yes
-
Referee: [the algorithmic description of the three schemes] The three real-time schemes are stated to yield local discontinuous PWA approximations, but the precise relationship between the QP-with-complementarity-constraints subproblem solved at each sample and the original MPCC is not shown to preserve the derived continuity/differentiability properties when the hybrid system switches. A concrete counter-example or additional assumption would be needed to confirm that the feedback-phase QP remains well-posed and the error bound carries over.
Authors: Each feedback-phase subproblem is a QPCC obtained by instantiating the parametric MPCC at the current measured state (with the complementarity constraints retained). Consequently, the continuity and differentiability results derived for parametric MPCCs apply directly to these subproblems. When a mode switch occurs, the parameter vector jumps, but a fresh QPCC is solved at the new point; the local PWA approximation is therefore rebuilt around the current operating condition. We will insert a clarifying remark (or short lemma) in the algorithmic section that makes this inheritance explicit and confirms that the uniform error bound carries over under the same regularity conditions already stated for the MPCCs. revision: yes
Circularity Check
No circularity in derivation chain; results derived from standard parametric optimization
full rationale
The paper formulates hybrid MPC as MPCCs, introduces three new real-time schemes that solve per-sample QPs with complementarity constraints to produce local discontinuous PWA approximations, and derives continuity/differentiability properties plus uniform boundedness conditions for the approximation error under explicit regularity assumptions on the solution map. These steps rely on standard results from nonlinear programming and parametric optimization rather than self-definitions, fitted inputs renamed as predictions, or load-bearing self-citations. The robotic manipulation example serves only as illustration; the theoretical claims remain independent of it and do not reduce to their inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Time-optimal online replanning for agile quadrotor flight,
A. Romero, R. Penicka, and D. Scaramuzza, “Time-optimal online replanning for agile quadrotor flight,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 7730–7737, 2022
work page 2022
-
[2]
A survey of industrial model predictive control technology,
S. J. Qin and T. A. Badgwell, “A survey of industrial model predictive control technology,”Control Engineering Practice, vol. 11, 2003
work page 2003
-
[3]
B. Brogliato and A. Tanwani, “Dynamical systems coupled with mono- tone set-valued operators: Formalisms, applications, well-posedness, and stability,”SIAM Review, vol. 62, no. 1, pp. 3–129, 2020
work page 2020
-
[4]
A direct method for trajectory optimization of rigid bodies through contact,
M. Posa, C. Cantu, and R. Tedrake, “A direct method for trajectory optimization of rigid bodies through contact,”The International Journal of Robotics Research, vol. 33, no. 1, pp. 69–81, 2014
work page 2014
-
[5]
Mpec strategies for optimization of a class of hybrid dynamic systems,
B. T. Baumrucker and L. T. Biegler, “Mpec strategies for optimization of a class of hybrid dynamic systems,”Journal of Process Control, vol. 19, no. 8, pp. 1248–1256, 2009
work page 2009
-
[6]
Predictive control of hybrid systems: Input- to-state stability results for sub-optimal solutions,
M. Lazar and W. Heemels, “Predictive control of hybrid systems: Input- to-state stability results for sub-optimal solutions,”Automatica, vol. 45, no. 1, pp. 180–185, 2009
work page 2009
-
[7]
Model predictive control of hybrid dynamical systems,
R. G. Sanfelice and B. Altın, “Model predictive control of hybrid dynamical systems,”IEEE Transactions on Automatic Control, 2026
work page 2026
-
[8]
Control of systems integrating logic, dynamics, and constraints,
A. Bemporad and M. Morari, “Control of systems integrating logic, dynamics, and constraints,”Automatica, vol. 35, no. 3, 1999
work page 1999
-
[9]
Nurkanovi ´c,Numerical Methods for Optimal Control of Nonsmooth Dynamical Systems
A. Nurkanovi ´c,Numerical Methods for Optimal Control of Nonsmooth Dynamical Systems. PhD thesis, University of Freiburg, 2023
work page 2023
-
[10]
Saltation matrices: The essential tool for linearizing hybrid dynamical systems,
N. J. Kong, J. J. Payne, J. Zhu, and A. M. Johnson, “Saltation matrices: The essential tool for linearizing hybrid dynamical systems,” Proceedings of the IEEE, 2024
work page 2024
-
[11]
Efficient numerical methods for nonlinear MPC and moving horizon estimation,
M. Diehl, H. J. Ferreau, and N. Haverbeke, “Efficient numerical methods for nonlinear MPC and moving horizon estimation,” inNonlinear model predictive control, vol. 384 ofLecture Notes in Control and Information Sciences, Springer, 2009
work page 2009
-
[12]
Sager,Numerical methods for mixed–integer optimal control prob- lems
S. Sager,Numerical methods for mixed–integer optimal control prob- lems. T ¨onning, L ¨ubeck, Marburg: Der andere Verlag, 2005
work page 2005
-
[13]
Kirches,Fast Numerical Methods for Mixed-Integer Nonlinear Model-Predictive Control
C. Kirches,Fast Numerical Methods for Mixed-Integer Nonlinear Model-Predictive Control. PhD thesis, University of Heidelberg, 2010
work page 2010
-
[14]
Diehl,Real-Time Optimization for Large Scale Nonlinear Processes
M. Diehl,Real-Time Optimization for Large Scale Nonlinear Processes. PhD thesis, University of Heidelberg, 2001
work page 2001
-
[15]
Fiacco,Introduction to sensitivity and stability analysis in nonlinear programming
A. Fiacco,Introduction to sensitivity and stability analysis in nonlinear programming. New York: Academic Press, 1983
work page 1983
-
[16]
Solution point differentiability without strict com- plementarity in nonlinear programming,
K. Jittorntrum, “Solution point differentiability without strict com- plementarity in nonlinear programming,”Mathematical programming, vol. 21, pp. 127–138, 1984
work page 1984
-
[17]
Directional derivatives of the solution of a parametric nonlinear program,
D. Ralph and S. Dempe, “Directional derivatives of the solution of a parametric nonlinear program,”Mathematical programming, vol. 70, pp. 159–172, 1995
work page 1995
-
[18]
The advanced step NMPC controller: Optimality, stability and robustness,
V . M. Zavala and L. T. Biegler, “The advanced step NMPC controller: Optimality, stability and robustness,”Automatica, vol. 45, 2009
work page 2009
-
[19]
Z. Luo, J. Pang, and D. Ralph,Mathematical Programs with Equilibrium Constraints. Cambridge: Cambridge University Press, 1996
work page 1996
-
[20]
Mathematical programs with complemen- tarity constraints: Stationarity, optimality, and sensitivity,
H. Scheel and S. Scholtes, “Mathematical programs with complemen- tarity constraints: Stationarity, optimality, and sensitivity,”Math. Oper. Res., vol. 25, pp. 1–22, 2000
work page 2000
-
[21]
Mpec methods for bilevel opti- mization problems,
Y . Kim, S. Leyffer, and T. Munson, “Mpec methods for bilevel opti- mization problems,” inBilevel Optimization, Springer, 2020
work page 2020
-
[22]
Local Convergence of SQP Methods for Mathematical Programs with Equilibrium Con- straints,
R. Fletcher, S. Leyffer, D. Ralph, and S. Scholtes, “Local Convergence of SQP Methods for Mathematical Programs with Equilibrium Con- straints,”SIAM Journal on Optimization, vol. 17, pp. 259–286, 2006
work page 2006
-
[23]
Recent advances in quadratic programming algorithms for nonlinear model predictive control,
D. Kouzoupis, G. Frison, A. Zanelli, and M. Diehl, “Recent advances in quadratic programming algorithms for nonlinear model predictive control,”Vietnam Journal of Mathematics, vol. 46, no. 4, 2018
work page 2018
-
[24]
A note on sensitivity of value functions of mathematical programs with complementarity constraints,
X. Hu and D. Ralph, “A note on sensitivity of value functions of mathematical programs with complementarity constraints,”Mathemat- ical Programming, vol. 93, no. 2, pp. 265–279, 2002
work page 2002
-
[25]
L. Guo, G.-H. Lin, J. J. Ye, and J. Zhang, “Sensitivity analysis of the value function for parametric mathematical programs with equilibrium constraints,”SIAM Journal on Optimization, vol. 24, no. 3, 2014
work page 2014
-
[26]
G. Kim, D. Kang, J.-H. Kim, S. Hong, and H.-W. Park, “Contact-implicit model predictive control: Controlling diverse quadruped motions without pre-planned contact modes or trajectories,”The International Journal of Robotics Research, vol. 44, no. 3, pp. 486–510, 2025
work page 2025
-
[27]
On the surprising robustness of sequential convex optimization for contact-implicit motion planning,
Y . Li, H. Han, S. Kang, J. Ma, and H. Yang, “On the surprising robustness of sequential convex optimization for contact-implicit motion planning,”arXiv preprint arXiv:2502.01055, 2025
-
[28]
Consensus com- plementarity control for multi-contact mpc,
A. Aydinoglu, A. Wei, W.-C. Huang, and M. Posa, “Consensus com- plementarity control for multi-contact mpc,”IEEE Transactions on Robotics, 2024. 16 IEEE TRANSACTIONS AND JOURNALS TEMPLATE
work page 2024
-
[29]
Nonconvex structures in nonlinear programming,
S. Scholtes, “Nonconvex structures in nonlinear programming,”Opera- tions Research, vol. 52, no. 3, pp. 368–383, 2004
work page 2004
-
[30]
Local convergence results for sequential quadratic programming with complementarity constraints,
A. Nurkanovi ´c, “Local convergence results for sequential quadratic programming with complementarity constraints,”arXiv preprint, 2026
work page 2026
-
[31]
J. Nocedal and S. J. Wright,Numerical Optimization. Springer Series in Operations Research and Financial Engineering, Springer, 2 ed., 2006
work page 2006
-
[32]
Some properties of regularization and penalization schemes for mpecs,
D. Ralph and S. J. Wright, “Some properties of regularization and penalization schemes for mpecs,”Optimization Methods and Software, vol. 19, no. 5, pp. 527–556, 2004
work page 2004
-
[33]
A. Nurkanovi ´c, A. Pozharskiy, and M. Diehl, “Solving mathematical programs with complementarity constraints arising in nonsmooth opti- mal control,”Vietnam Journal of Mathematics, pp. 1–39, 2024
work page 2024
-
[34]
C. Kanzow and A. Schwartz, “The price of inexactness: convergence properties of relaxation methods for mathematical programs with com- plementarity constraints revisited,”Mathematics of Operations Research, vol. 40, no. 2, pp. 253–275, 2015
work page 2015
-
[35]
A. Pozharskiy, F. Pacaud, M. Diehl, and A. Nurkanovi ´c, “CCOpt: an open-source solver for large-scale mathematical programs with comple- mentarity constraints,”arXiv preprint, 2026
work page 2026
-
[36]
Strong stationarity conditions for optimal control of hybrid systems,
A. B. Hempel, P. J. Goulart, and J. Lygeros, “Strong stationarity conditions for optimal control of hybrid systems,”IEEE Transactions on Automatic Control, vol. 62, no. 9, pp. 4512–4526, 2017
work page 2017
-
[37]
A. Nurkanovi ´c and S. Leyffer, “A globally convergent method for com- puting b-stationary points of mathematical programs with equilibrium constraints,”arXiv preprint arXiv:2501.13835, 2025
-
[38]
Continuous optimization for control of hybrid systems with hysteresis via time-freezing,
A. Nurkanovi ´c and M. Diehl, “Continuous optimization for control of hybrid systems with hysteresis via time-freezing,”IEEE Control Systems Letters, vol. 6, pp. 3182–3187, 2022
work page 2022
-
[39]
LCQPow: a solver for linear complementarity quadratic programs,
J. Hall, A. Nurkanovi ´c, F. Messerer, and M. Diehl, “LCQPow: a solver for linear complementarity quadratic programs,”Mathematical Programming Computation, 2024
work page 2024
-
[40]
The Advanced Step Real Time Iteration for NMPC,
A. Nurkanovi ´c, A. Zanelli, S. Albrecht, and M. Diehl, “The Advanced Step Real Time Iteration for NMPC,” inProceedings of the IEEE Conference on Decision and Control (CDC), 2019
work page 2019
-
[41]
NOSNOC: A software package for numerical optimal control of nonsmooth systems,
A. Nurkanovi ´c and M. Diehl, “NOSNOC: A software package for numerical optimal control of nonsmooth systems,”IEEE Control Systems Letters, vol. 6, pp. 3110–3115, 2022
work page 2022
-
[42]
Differential Equations with discontinuous right hand side,
A. Filippov, “Differential Equations with discontinuous right hand side,” AMS Transl., vol. 42, pp. 199–231, 1964
work page 1964
-
[43]
Finite Elements with Switch Detection for Direct Optimal Control of Nonsmooth Sys- tems,
A. Nurkanovi ´c, M. Sperl, S. Albrecht, and M. Diehl, “Finite Elements with Switch Detection for Direct Optimal Control of Nonsmooth Sys- tems,”Numerische Mathematik, pp. 1–48, 2024
work page 2024
-
[44]
A. Nurkanovi ´c, A. Pozharskiy, J. Frey, and M. Diehl, “Finite elements with switch detection for numerical optimal control of nonsmooth dynamical systems with set-valued Heaviside step functions,”Nonlinear Analysis: Hybrid Systems, vol. 54, p. 101518, 2024
work page 2024
-
[45]
Brogliato,Nonsmooth Mechanics: Models, Dynamics and Control
B. Brogliato,Nonsmooth Mechanics: Models, Dynamics and Control. Springer, 2016
work page 2016
-
[46]
On the equivalence between complementarity systems, projected systems and differential inclusions,
B. Brogliato, A. Daniilidis, C. Lemarechal, and V . Acary, “On the equivalence between complementarity systems, projected systems and differential inclusions,”Systems & Control Letters, vol. 55, no. 1, 2006
work page 2006
-
[47]
A. Pozharskiy, A. Nurkanovi ´c, and M. Diehl, “First-order sweeping processes and extended projected dynamical systems: Equivalence, time-discretization and numerical optimal control,”Proceedings of the European Control Conference (ECC), 2025
work page 2025
-
[48]
Limit Cycles with Chat- tering in Relay Feedback Systems,
K. Johansson, A. Barabanov, and K. Astr ¨om, “Limit Cycles with Chat- tering in Relay Feedback Systems,”IEEE Transactions on Automatic Control, vol. 47, no. 9, pp. 1414–1423, 2002
work page 2002
-
[49]
Equivalence of hybrid dynamical models,
W. P. Heemels, B. De Schutter, and A. Bemporad, “Equivalence of hybrid dynamical models,”Automatica, vol. 37, no. 7, 2001
work page 2001
-
[50]
L. T. Biegler,Nonlinear Programming. MOS-SIAM Series on Opti- mization, SIAM, 2010
work page 2010
-
[51]
W. Achtziger and C. Kanzow, “Mathematical programs with vanishing constraints: optimality conditions and constraint qualifications,”Mathe- matical Programming, vol. 114, pp. 69–99, 2008
work page 2008
-
[52]
M. Szmuk, T. P. Reynolds, and B. Ac ¸ıkmes ¸e, “Successive convexifi- cation for real-time six-degree-of-freedom powered descent guidance with state-triggered constraints,”Journal of Guidance, Control, and Dynamics, vol. 43, no. 8, pp. 1399–1413, 2020
work page 2020
-
[53]
Optimal control of systems with discontinuous differential equations,
D. E. Stewart and M. Anitescu, “Optimal control of systems with discontinuous differential equations,”Numerische Mathematik, vol. 114, no. 4, pp. 653–695, 2010
work page 2010
-
[54]
Limits of MPCC Formula- tions in Direct Optimal Control with Nonsmooth Differential Equations,
A. Nurkanovi ´c, S. Albrecht, and M. Diehl, “Limits of MPCC Formula- tions in Direct Optimal Control with Nonsmooth Differential Equations,” in2020 European Control Conference (ECC), pp. 2015–2020, 2020
work page 2015
-
[55]
Constrained optimal feedback control of systems governed by large differential algebraic equations,
H. G. Bock, M. Diehl, E. A. Kostina, and J. P. Schl ¨oder, “Constrained optimal feedback control of systems governed by large differential algebraic equations,” inReal-Time and Online PDE-Constrained Op- timization, pp. 3–22, SIAM, 2007
work page 2007
-
[56]
A. Zanelli,Inexact methods for nonlinear model predictive control: stability, applications, and software. PhD thesis, Uni. of Freiburg, 2021
work page 2021
-
[57]
Q. Tran-Dinh, C. Savorgnan, and M. Diehl, “Adjoint-based predictor- corrector sequential convex programming for parametric nonlinear opti- mization,”SIAM J. Optimization, vol. 22, no. 4, pp. 1258–1284, 2012
work page 2012
-
[58]
Deuflhard,Newton methods for nonlinear problems: affine invariance and adaptive algorithms, vol
P. Deuflhard,Newton methods for nonlinear problems: affine invariance and adaptive algorithms, vol. 35. Springer, 2011
work page 2011
-
[59]
A. F. Izmailov, “Mathematical programs with complementarity con- straints: regularity, optimality conditions, and sensitivity,”Computa- tional Mathematics and Mathematical Physics, vol. 44, no. 7, 2004
work page 2004
-
[60]
Bp-mpc: Optimizing the closed- loop performance of mpc using backpropagation,
R. Zuliani, E. C. Balta, and J. Lygeros, “Bp-mpc: Optimizing the closed- loop performance of mpc using backpropagation,”IEEE Transactions on Automatic Control, 2025
work page 2025
-
[61]
J. Frey, A. Nurkanovi ´c, and M. Diehl, “Advanced-step real-time itera- tions with four levels – new error bounds and fast implementation in acados,”IEEE Control Systems Letters, 2024
work page 2024
-
[62]
A. W ¨achter and L. T. Biegler, “On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear programming,” Mathematical Programming, vol. 106, no. 1, pp. 25–57, 2006
work page 2006
-
[63]
CasADi – a software framework for nonlinear optimization and optimal control,
J. A. E. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “CasADi – a software framework for nonlinear optimization and optimal control,”Mathematical Programming Computation, vol. 11, 2019
work page 2019
-
[64]
HPIPM: a high-performance quadratic pro- gramming framework for model predictive control,
G. Frison and M. Diehl, “HPIPM: a high-performance quadratic pro- gramming framework for model predictive control,” inProceedings of the IFAC World Congress, (Berlin, Germany), 2020. Armin Nurkanovi ´creceived the B.Sc. degree from the Faculty of Electrical Engineering, Tuzla, Bosnia and Herzegovina, in 2015, and the M.Sc. degree in Electrical and Compute...
work page 2020
-
[65]
degree in Engineering from the University of Freiburg, Ger- many
In 2023, he received his Ph.D. degree in Engineering from the University of Freiburg, Ger- many. He received the IEEE Control Systems Letters Outstanding Paper Award in 2022 and was a finalist for the 2024 European Systems & Control PhD Thesis Award. In 2025, he served as an interim professor of mathematical optimization at TU Braun- schweig. His research...
work page 2023
-
[66]
From 2006 to 2013, he was a Professor at the Department of Electrical Engineering, KU Leuven, Belgium. Since 2013, he is full professor at the Department of Microsystems Engineer- ing at his current affiliation in Freiburg, where he is also affiliated with the Department of Mathematics. His research interests span optimization and control, ranging from nu...
work page 2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.